一 本章简介
在正式开始点灯、读按键、驱动屏幕、控制电机之前,我们先停下来问一个最基础的问题:
单片机到底是什么?
很多初学者第一次接触单片机时,容易把它理解成 一块能写程序的小芯片 。这个说法不能算错,但太浅了。如果只停留在这个层面,后面学 GPIO、串口、定时器、ADC、中断、DMA、RTOS 时,很容易出现一种感觉:每一章好像都能照着例程跑起来,但始终不知道这些知识之间是什么关系。
本章的目标,就是帮大家建立一张 嵌入式开发的底层地图 。
我们会从一个生活化的角度开始,把单片机看成一个专门做控制任务的小型自动化系统;然后再逐步深入到它的内部结构、程序运行流程、存储器、外设、时钟、中断、低功耗、选型和工程实践。学完本章后,你不一定能立刻写出复杂项目,但至少应该能明白:
- 单片机和普通电脑、树莓派、PLC 有什么区别。
- 为什么一颗小芯片能控制 LED、传感器、电机、屏幕和通信模块。
- 程序下载到芯片后,到底存在哪里,又是怎么一步步跑起来的。
- 工程师做单片机项目时,真正关心的不是【能不能跑】,而是【能不能稳定、可靠、可维护地长期运行】。
NOTE
本章是纯理论章节,不要求大家立刻记住所有术语。初学者建议先建立整体认知;有经验的工程师可以重点看工程实践、选型思路和常见误区部分。
1.1 学习目标
| 序号 | 学习目标 | 重要程度 |
|---|---|---|
| 1 | 理解单片机、微控制器、嵌入式系统之间的关系 | ⭐⭐⭐⭐⭐ |
| 2 | 了解单片机内部由 CPU、存储器、总线、外设、时钟、复位等模块组成 | ⭐⭐⭐⭐⭐ |
| 3 | 明白程序从编译、下载到上电运行的大致流程 | ⭐⭐⭐⭐⭐ |
| 4 | 建立 寄存器控制硬件 的基本思维,为后续 GPIO、定时器、串口等章节打基础 | ⭐⭐⭐⭐⭐ |
| 5 | 理解单片机项目中的实时性、可靠性、资源受限和工程边界等理念 | ⭐⭐⭐⭐ |
| 6 | 学会从项目需求角度初步判断该选什么类型的单片机 | ⭐⭐⭐⭐ |
1.2 重点提示
- 单片机不是缩小版电脑,它更像是一个专门完成控制任务的 电子控制器 。
- 单片机内部不仅有 CPU,还集成了 Flash、SRAM、GPIO、定时器、串口、ADC、SPI、I2C 等大量外设。
- 程序控制单片机,本质上是 CPU 按照指令去读写内存地址,只不过其中一部分特殊地址对应的就是外设寄存器,理论上来说,你对寄存器的控制就和在电脑上修改文件一样。
- 单片机项目的难点不只是写代码,还包括电源、时钟、复位、抗干扰、接口保护、冲突资源规划和有限资源复用等。
- 初学时不要急着背寄存器(完全没必要背),也不要只会复制例程。更重要的是理解【代码为什么能控制硬件】。
1.3 基础概念与术语
- 单片机(MCU, Microcontroller Unit):把 CPU、存储器和常用外设集成在一颗芯片里的微型控制器,主要用于控制类任务。
- 嵌入式系统(Embedded System):嵌入到设备内部、完成特定功能的计算机系统。例如电动车控制器、路由器、空调主控板、无人机飞控等,一般做我们这一行的就叫嵌入式工程师。
- CPU(Central Processing Unit):中央处理器,负责执行指令、计算数据、控制程序流程,和我们电脑里面的CPU是一个概念,只不过单片机里面的CPU弱很多,价格也低很多。
- 内核(Core):CPU 的核心架构,比如天空星开发板所用主控芯片 STM32F407 使用的是 ARM Cortex-M4 内核。
- Flash:非易失性程序存储器,掉电后内容不丢失,一般用来保存用户程序,基本等同于电脑上的固态硬盘或者机械硬盘。
- SRAM:易失性数据存储器,程序运行时用来保存变量、栈、缓冲区,掉电后内容丢失,基本等同于电脑上面的内存条。
- 外设(Peripheral):单片机内部集成的功能模块,如 GPIO、USART、SPI、I2C、ADC、TIM、CAN、USB、ETH 等。
- 寄存器(Register):控制硬件模块的特殊存储单元。对寄存器写入不同的值,硬件就会进入不同的工作状态,就像提线木偶的那些线一样,改变这些寄存器就相当于改变这些线的状态,从而改变硬件外设的行为。
- 总线(Bus):芯片内部不同模块之间传输数据的通道,可以理解为芯片内部的高速公路。
- 时钟(Clock):单片机运行的节拍来源。CPU 和外设都需要时钟才能工作,几乎所有的数字芯片都需要稳定的时钟。
- 中断(Interrupt):外部事件或内部事件打断当前程序,让 CPU 优先处理紧急任务的机制。
- 实时性(Real-time):系统必须在规定时间内完成响应,不只是最终能完成就行。
二 什么是单片机?
2.1 从生活中的控制器说起
大家先不要急着看芯片手册,我们先想几个日常设备:
- 电饭煲按下 煮饭 后,会根据温度和时间自动控制加热。
- 空调会读取温度传感器,然后控制压缩机、风机和摆风电机。
- 电动车控制器会读取油门、电机霍尔、刹车信号,然后输出 PWM 控制电机,从而控制车速。
- 3D 打印机会控制步进电机、加热嘴、风扇、限位开关和屏幕。
- 在我们的筑基学习板上,我们可以控制 LED、蜂鸣器、电机、以太网、传感器、音频和屏幕。
这些设备的共同点是:它们都需要一个 大脑 。
这个 大脑 不一定要像电脑一样能打开浏览器、运行大型软件、显示复杂桌面。它只需要稳定地完成一组明确任务:
- 读取外部状态:按键是否按下、温度是多少、电机转到哪里了、电压是否正常。
- 根据程序逻辑做判断:现在该加热、停止、报警、通信,还是进入低功耗省电模式。
- 控制外部设备:点亮 LED、输出 PWM、打开继电器、发送数据、驱动电机。
- 长时间稳定运行:可能一跑就是几个月甚至几年都不关机。
单片机就是专门为这类控制任务设计的芯片。
它不追求像电脑 CPU 那样跑大型操作系统,也不追求像显卡那样做海量并行计算。它追求的是:
- 成本低。
- 功耗低。
- 外设丰富。
- 实时性好。
- 上电即可快速启动运行。
- 能直接和真实世界的电信号打交道。
2.2 单片机的正式定义
单片机,英文常叫 MCU,全称是 Microcontroller Unit,中文也叫微控制器。
它是一种把以下模块集成到同一颗芯片内部的控制芯片:
- CPU 内核。
- 程序存储器 Flash。
- 数据存储器 SRAM。
- GPIO 输入输出接口。
- 定时器、串口、SPI、I2C、ADC、CAN、USB 等片上外设。
- 时钟、复位、看门狗、低功耗管理等系统模块。
可以把它理解成一个 浓缩版控制系统:
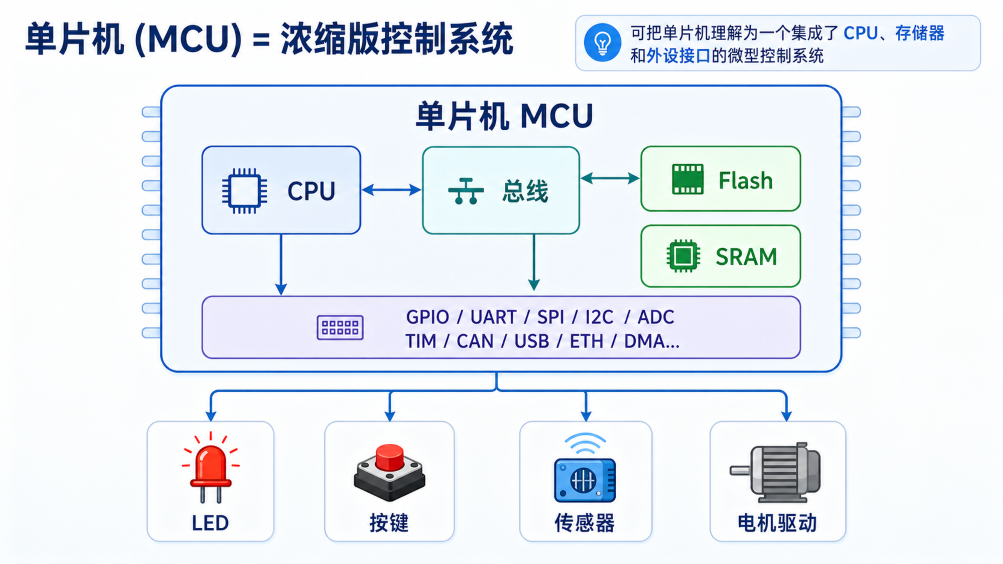
上图由AI生成
2.3 为什么叫“单片机”?
早期的计算机系统往往需要多颗芯片配合工作:
- 一颗 CPU 芯片负责计算。
- 一颗 ROM 芯片存程序。
- 一颗 RAM 芯片存数据。
- 一堆接口芯片负责输入输出。
后来半导体工艺进步后,工程师把这些常用模块都集成到一颗芯片里,这就是【单片】二字的由来。
所以, 单片机 并不是说它只能单独工作,也不是说它只能做简单事情,而是说它把一个控制系统的核心部件集成在了单颗芯片里。
这也是为什么单片机特别适合大规模产品:
- 外围电路少,BOM 成本低。
- 板子面积小,适合嵌入到设备内部。
- 可靠性高,连接点越少,潜在故障点越少。
- 功耗可控,适合电池供电设备。
2.4 从 51 到 STM32:历史脉络与技术演进
前面我们从控制任务的角度解释了【单片机是什么】。为了让这个概念更落地,这里介绍一下关于 51 单片机、STM32 演进和点灯程序对比的内容。它们不是孤立的历史知识,而是在说明一件事:无论是 8 位 51,还是 32 位 STM32,本质上都是通过程序、寄存器和外设去控制真实硬件。
2.4.1 51 单片机:单片机学习里的经典起点
说到单片机,就不得不提一个传奇的名字——51 单片机。我刚进大学的时候那些电子实验室用的教学用具就是STC单片机,它就属于51单片机的一种。
2.4.1.1 51 单片机的历史
51 单片机的【51】来源于 Intel 公司在 1980 年推出的 8051 芯片。这款芯片开创了单片机的先河,其简洁的架构和指令集成为了后来无数单片机学习者的入门之选。
历史时间线:
| 年份 | 事件 |
|---|---|
| 1976 年 | Intel 推出 8048,这是早期的单片机雏形 |
| 1980 年 | Intel 推出 8051,奠定了单片机的基本架构 |
| 1981 年 | Intel 推出 8751(带 EPROM 版本) |
| 1980s-90s | 众多厂商获得授权或开发兼容芯片:Atmel、Philips、Siemens、Dallas 等 |
| 2000s | 中国 STC(宏晶科技)推出廉价 51 兼容芯片,成为国内教学首选 |
| 至今 | 51 架构仍在特定领域使用,但逐渐被 ARM 等现代架构替代 |
虽然 Intel 自己后来不再主推 51 系列,但它的架构被全球众多厂商(如 Atmel、STC 宏晶等)继承和发展,至今仍广泛应用于教学和一些对成本极度敏感的场景。
2.4.1.2 51 单片机的架构特点
51 单片机的主要特点:
- 8 位架构:一次只能处理 8 位(1 字节)的数据。
- 资源有限:早期的 8051 只有 4KB ROM、128 字节 RAM。
- 指令简单:汇编指令集清晰易懂,非常适合初学者理解底层原理。
- 外设简单:GPIO、定时器、串口、中断,基本功能一应俱全。
51 单片机的内部资源(以经典 8051 为例):
| 资源 | 规格 | 说明 |
|---|---|---|
| CPU | 8 位 | 基于 CISC 架构 |
| 程序存储器 | 4KB ROM | 存放程序代码 |
| 数据存储器 | 128 字节 RAM | 存放变量和堆栈 |
| 特殊功能寄存器 | 21 个 SFR | 控制各种外设 |
| I/O 口 | 4 组 × 8 位 = 32 个 | P0、P1、P2、P3 |
| 定时器/计数器 | 2 个 16 位 | Timer0、Timer1 |
| 串口 | 1 个全双工 | 支持多种工作模式 |
| 中断源 | 5 个 | 外部中断×2 + 定时器×2 + 串口×1 |
| 时钟频率 | 最高 12 MHz(经典) | 现代增强型可达 35 MHz+ |
TIP
为什么 51 单片机叫 51 ?
51 来源于 Intel 的产品编号 8051。在 Intel 的命名规则中:
- 80 是 Intel 的产品系列前缀
- 51 是这款单片机的型号编号
后来,51 就成了这一类兼容芯片的代名词。你可能还会听到 52(如 8052、STC89C52),它是 8051 的增强版,增加了一个定时器和更多 RAM。
2.4.1.3 51 单片机的编程示例
对于很多 80 后、90 后的电子爱好者来说,51 单片机就是他们的 初恋。用一块 STC89C52,配上几个 LED 和按键,就能完成从点灯到跑马灯、从蜂鸣器到数码管显示的各种实验。
下面是一个经典的 51 单片机点灯程序:
/*
* 51单片机点灯示例
* 功能:让 P1.0 引脚连接的 LED 每隔约 500ms 闪烁一次
* 芯片:STC89C52(12MHz 晶振)
*/
#include <reg52.h> // 51单片机寄存器定义头文件
// 定义 LED 引脚(sbit 是 51 单片机特有的位定义关键字)
sbit LED = P1^0; // P1 口的第 0 位
// 延时函数(软件延时,不精确)
void delay_ms(unsigned int ms)
{
unsigned int i, j;
for(i = 0; i < ms; i++)
{
for(j = 0; j < 120; j++)
{
// 空循环消耗时间
// 12MHz 晶振下,大约延时 1ms
}
}
}
// 主函数
void main()
{
while(1) // 无限循环
{
LED = 0; // 点亮 LED(低电平点亮)
delay_ms(500); // 延时 500ms
LED = 1; // 熄灭 LED
delay_ms(500); // 延时 500ms
}
}代码解析:
#include <reg52.h>:包含 51 单片机的寄存器定义文件,这样我们就可以用 P1、P2 等名称来访问 I/O 端口。sbit LED = P1^0;:sbit是 51 单片机 C 语言的特殊关键字,用于定义单个位。P1^0表示 P1 端口的第 0 位。LED = 0;:将引脚设为低电平。如果 LED 是共阳极接法(正极接 VCC),低电平就能点亮 LED。while(1):无限循环,单片机最简单的程序通常都是这样的结构——永远运行下去。
NOTE
虽然 51 单片机资源有限、性能较低,但它的架构思想和编程模式至今仍有借鉴意义。如果你之前学过 51 单片机,会发现很多概念(如 GPIO、寄存器、中断)在 STM32 上是相通的,只是更加复杂和强大。不过学习STM32完全没必要先去学51单片机。
2.4.1.4 51 单片机的寄存器操作
51 单片机的精髓在于直接操作寄存器。每个外设都有对应的特殊功能寄存器(SFR, Special Function Register),通过读写这些寄存器来控制外设。
常用的 51 单片机 SFR:
| 寄存器名 | 地址 | 功能 |
|---|---|---|
| P0 | 0x80 | I/O 端口 0 |
| P1 | 0x90 | I/O 端口 1 |
| P2 | 0xA0 | I/O 端口 2 |
| P3 | 0xB0 | I/O 端口 3 |
| TCON | 0x88 | 定时器控制寄存器 |
| TMOD | 0x89 | 定时器模式寄存器 |
| TH0/TL0 | 0x8C/0x8A | 定时器 0 计数值 |
| TH1/TL1 | 0x8D/0x8B | 定时器 1 计数值 |
| SCON | 0x98 | 串口控制寄存器 |
| SBUF | 0x99 | 串口数据缓冲器 |
| IE | 0xA8 | 中断使能寄存器 |
| IP | 0xB8 | 中断优先级寄存器 |
这种 通过寄存器控制硬件 的思想,在 STM32 上同样适用,只是 STM32 的寄存器数量更多、功能更复杂。
2.4.2 从 51 到 STM32:为什么现代 MCU 需要更强的能力
随着科技的发展,人们对嵌入式设备的要求越来越高:更快的运算速度、更大的存储空间、更丰富的外设功能、更低的功耗……8 位单片机渐渐力不从心了。
于是,32 位单片机应运而生。
2.4.2.1 为什么需要 32 位单片机?
让我们通过几个实际场景来理解为什么 8 位单片机不够用了:
场景一:复杂的数学运算
假设你需要做一个无人机飞控,需要实时计算姿态角度:
// 姿态解算中的一个计算(四元数更新)
float q0_new = q0 - 0.5f * (q1*gx + q2*gy + q3*gz) * dt;这个公式涉及浮点数乘法和加法。对于 8 位单片机:
- 没有硬件浮点运算单元(FPU),只能用软件模拟
- 一次浮点乘法可能需要几百个时钟周期
- 整个姿态解算算法可能需要几十毫秒,无法满足实时性要求
而 STM32F4 系列带有硬件 FPU,一次浮点乘法只需要 1-2 个时钟周期,性能提升百倍以上!
WARNING
不是所有 STM32 都带 FPU。Cortex‑M4 的 STM32F4(天空星核心板用的芯片) 系列常见带单精度 FPU(浮点单元,硬件只支持 float/single‑precision);Cortex‑M0/M0+(如 STM32F0)没有 FPU。Cortex‑M7 的某些型号支持双精度/更高性能。
场景二:大数据量处理
假设你需要用单片机驱动一个 320×240 像素的彩色 LCD 屏幕:
- 每个像素 16 位颜色 = 2 字节(RGB565 方式排列)
- 总数据量 = 320 × 240 × 2 = 153,600 字节 ≈ 150KB
而 51 单片机只有 128 字节到几 KB 的 RAM,根本放不下一帧图像数据!
STM32F407 拥有 192KB RAM(内含64KB CCM RAM),可以轻松处理图形界面。不过一般在单片机中,我们也不会直接放一帧的图像数据,太浪费了。
场景三:多任务并发
现代嵌入式设备经常需要同时处理多个任务:
- 读取传感器数据
- 更新显示屏
- 响应用户按键
- 通过 WiFi 上传数据
- 控制电机转速
这需要运行实时操作系统(RTOS),而 RTOS 本身就需要一定的 RAM 和 CPU 资源。8 位单片机往往力不从心,而 32 位单片机可以轻松胜任。
2.4.2.2 STM32 的崛起
STM32 就是这一浪潮中的佼佼者。STM32 是意法半导体(STMicroelectronics,简称 ST)公司推出的一系列 32 位微控制器产品,基于 ARM Cortex-M 内核。自 2007 年推出以来,凭借其高性能、低功耗、丰富的外设、完善的生态,迅速成为全球最受欢迎的 32 位单片机之一。
STM32 成功的关键因素:
| 因素 | 说明 |
|---|---|
| 性价比 | 相比同类产品,STM32 在价格和性能之间取得了很好的平衡 |
| 产品线丰富 | 从超低功耗 L 系列到高性能 H 系列,覆盖几乎所有应用场景 |
| 生态完善 | ST 提供免费的开发工具 STM32CubeIDE、HAL 库、丰富的例程 |
| 文档详尽 | 数据手册、参考手册、应用笔记一应俱全,且质量很高 |
| 社区活跃 | 全球有大量开发者使用 STM32,遇到问题很容易找到答案 |
| 供货稳定 | ST 是大厂,供货能力强,不容易缺货(虽然 2021 年也缺过,导致价格暴涨,不过目前价格基本已经恢复了) |
2.4.2.3 从 51 到 STM32 的变化对比
从 51 到 STM32,有哪些变化?
| 对比项 | 51 单片机(以 STC89C52 为例) | STM32(以 STM32F407 为例,还有更强性能的) |
|---|---|---|
| 位宽 | 8 位 | 32 位 |
| 主频 | 0~40MHz | 168 MHz |
| Flash | 8 KB | 512 KB ~ 1 MB(天空星STM32F4青春版是512K,高配版是1M) |
| RAM | 512 字节 | 128KB + 64 KB CCM |
| GPIO | 32 个左右 | 80+ 个以上,还有更大封装的。 |
| 外设 | UART、定时器、中断 | UART、SPI、I2C、USB、CAN、ADC、DAC、DMA、定时器(高级/通用/基本)、以太网、SDIO、FSMC... |
| 开发方式 | 主要用汇编或 C,直接操作寄存器 | C/C++,可使用 HAL/LL 库,生态完善 |
| 调试方式 | 主要靠串口打印 | SWD/JTAG 在线调试,断点、单步、查看变量 |
可以看出,STM32 在各方面都是 51 单片机的 全面升级版 。
2.4.2.4 STM32 点灯程序对比
让我们用代码来直观感受两者的区别。下面是 STM32 的点灯程序(寄存器版本,别害怕,后续教程会以HAL库为主):
/*
* STM32F407 点灯示例(寄存器版本)
* 功能:让 PA0 引脚连接的 LED 每隔约 500ms 闪烁一次
*/
#include "stm32f4xx.h"
// 简易延时函数
void delay_ms(uint32_t ms)
{
uint32_t i;
for(; ms > 0; ms--)
{
for(i = 0; i < 10000; i++)
{
__NOP(); // 空操作,防止被编译器优化
}
}
}
int main(void)
{
// 1. 使能 GPIOA 时钟(STM32 的外设需要先开时钟)
RCC->AHB1ENR |= RCC_AHB1ENR_GPIOAEN;
// 2. 配置 PA0 为通用输出模式
GPIOA->MODER &= ~GPIO_MODER_MODER0; // 清除原有配置
GPIOA->MODER |= GPIO_MODER_MODER0_0; // 设置为输出模式(01)
// 3. 配置输出类型为推挽
GPIOA->OTYPER &= ~GPIO_OTYPER_OT0;
// 4. 配置输出速度
GPIOA->OSPEEDR |= GPIO_OSPEEDER_OSPEEDR0_1; // 高速
// 5. 无需上下拉
GPIOA->PUPDR &= ~GPIO_PUPDR_PUPDR0;
while(1)
{
GPIOA->BSRR = GPIO_BSRR_BS0; // 置位 PA0(点亮 LED)
delay_ms(500);
GPIOA->BSRR = GPIO_BSRR_BR0; // 复位 PA0(熄灭 LED)
delay_ms(500);
}
}51 vs STM32 代码对比分析:
| 对比点 | 51 单片机 | STM32 |
|---|---|---|
| 时钟控制 | 无需手动开启 | 必须先使能外设时钟 |
| 引脚配置 | 简单,直接使用 | 需要配置模式、速度、上下拉等 |
| 引脚操作 | P1 = 0; | GPIOA->BSRR = xxx; |
| 代码量 | 较少 | 较多,但更灵活 |
| 可控性 | 有限 | 每个细节都可控 |
IMPORTANT
虽然 STM32 的代码看起来更复杂,但这正是它强大的体现——你可以精确控制每一个硬件细节。当然,如果你不想写这么底层的代码,可以使用 ST 提供的 HAL 库,几行代码就能完成同样的功能,只是效率会有轻微损失。
2.4.2.5 51 单片机的现状
虽然 STM32 更强大,但这并不意味着 51 单片机已经过时——在一些对成本极度敏感、功能需求简单的场景(如遥控器、简单玩具、LED 控制器),51 单片机依然有其市场。
51 单片机仍在使用的场景:
- 教学场景:51 架构简单清晰,非常适合帮助初学者理解单片机原理
- 超低成本产品:一颗 STC8 系列芯片只需几毛钱,批量成本优势明显
- 简单控制任务:只需要点几个 LED、响应几个按键的场合
- 存量市场维护:很多老产品使用 51 芯片,需要维护升级
TIP
学习建议:
- 如果你是完全的新手,可以考虑先用 1-2 周时间了解 51 单片机的基本概念,这有助于理解底层原理
- 如果你的目标是快速进入实际项目开发,直接学习 STM32 是更好的选择
- 无论从哪个开始,核心概念(GPIO、中断、定时器、通信协议)都是相通的
2.5 单片机适合做什么?不适合做什么?
学一个技术,最怕只知道它 能做什么 ,不知道它 不能做什么 。单片机很强,但它强在控制,不强在通用计算。
单片机特别适合下面这些任务:
| 任务类型 | 说明 | 例子 |
|---|---|---|
| 逻辑控制 | 根据输入状态做判断,然后控制输出 | 按键控制 LED、温控开关 |
| 实时控制 | 按固定周期或事件快速响应 | 电机 PWM、编码器计数、紧急保护 |
| 数据采集 | 读取传感器或模拟信号 | 温湿度、电压、电流、姿态 |
| 通信网关 | 在不同接口之间转发数据 | UART 转 CAN、RS485 采集器 |
| 低功耗设备 | 长时间电池供电运行 | 传感器节点、遥控器、智能门锁 |
| 小型人机交互 | 控制按键、旋钮、灯、屏幕 | 仪表面板、控制器面板 |
单片机不太适合下面这些任务:
| 任务类型 | 不适合的原因 |
|---|---|
| 大型图形界面 | RAM、显存、图形加速能力有限 |
| 复杂文件系统和数据库 | 存储资源有限,掉电保护复杂 |
| 高性能 AI 推理 | 算力和内存完全不适合 |
| 多用户网络服务 | 协议栈、内存、并发能力受限 |
| 大规模音视频处理 | 数据吞吐量和缓存空间不够 |
这不是说单片机完全不能做图形、网络、音频,而是要看规模。比如 STM32F407 可以驱动小尺寸 SPI 屏幕,可以跑 LwIP 做以太网通信,也可以做简单音频采集和播放。但如果你要做类似手机 App 的界面、高清视频、浏览器、数据库服务,那就应该考虑 Linux 级别的 MPU 或 SoC。
TIP
笔者这里给大家一个劝告:能用简单芯片可靠完成的事情,就不要上复杂平台;简单芯片明显吃力的事情,也不要硬撑。选型不是炫技,是降低项目风险。
2.6 单片机为什么能长期稳定运行?
很多家电、仪表、工业控制器上电后几年都不关机,里面往往就是一颗或多颗 MCU 在工作。它能长期运行,不是因为单片机 天生不会出错 ,而是因为这类系统通常具备以下特点:
- 功能边界清晰,不需要频繁安装卸载软件。
- 程序固化在 Flash 中,上电后按确定流程运行。
- 没有复杂的操作系统,后台不可控因素少。
- 外设由硬件模块完成,定时、PWM、通信接收不完全依赖 CPU 死循环。
- 可以通过看门狗、掉电检测、异常复位等机制自恢复。
- 电路设计上会加入电源滤波、接口保护、隔离和抗干扰设计。
但这也带来一个反向要求:单片机程序一旦烧进去,就会在真实设备里长期执行。一个很小的数组越界、计数溢出、状态机漏洞、Flash 掉电写坏,都可能在用户现场变成很难复现的问题。
所以我们学单片机,不只是学 点亮一个 LED ,更要逐渐学会【让这个 LED 在不同电压、温度、干扰、复位、异常输入下都符合预期】。
三 单片机能做什么?生活中的应用
单片机虽然 小 ,但它的应用领域却非常"大"。可以说,凡是需要自动化控制的地方,都可能有单片机的身影。了解这些应用场景,可以帮助你理解为什么要学习各种外设知识。
3.1 天空星筑基学习板能学哪些案例?
在深入了解单片机的各种应用之前,让我们先看看你可以用天空星筑基学习板实现哪些项目:
| 应用方向 | 具体项目示例 | 涉及的外设 |
|---|---|---|
| 基础控制 | LED流水灯、呼吸灯、按键控制 | GPIO、TIMER、PWM |
| 显示交互 | OLED显示屏、TFT彩屏 | SPI、I2C、GPIO |
| 传感器应用 | 温湿度监测、电压电流测量、姿态检测 | I2C、ADC、SPI |
| 通信应用 | 串口调试、I2C、SPI、网口通讯 | UART、SPI、I2C、ETH |
| 电机控制 | 直流电机调速、步进电机控制、舵机控制 | PWM、TIMER、GPIO |
| 音频应用 | 蜂鸣器音乐、音频播放 | PWM、I2S、I2C |
| 综合项目 | 智能小车、环境监测站 | 多种外设组合 |
TIP
单片机能做的事情,远比你想象的多,也远不止我上面说的这些。
3.2 消费电子
消费电子是单片机最常见的应用领域之一,从最简单的遥控器到复杂的智能手表,都有单片机的身影。
| 产品 | 使用的外设 | 典型单片机 |
|---|---|---|
| 遥控器 | GPIO(按键)、定时器(载波)、红外 LED | 8 位 MCU(STC、PIC) |
| 智能手环/手表 | I2C(加速度计)、SPI(屏幕)、ADC(心率)、BLE | Cortex-M0+(如 nRF52) |
| 电动牙刷 | PWM(电机控制)、ADC(电量检测)、GPIO(按键) | 8 位或 Cortex-M0 |
| 无线耳机 | I2S(音频)、SPI(蓝牙模块)、ADC(触控)、BLE | Nordic nRF52、蓝讯 BT |
| 充电宝 | ADC(电压电流检测)、PWM(充放电控制)、GPIO(LED) | 8 位 MCU 或 Cortex-M0 |
案例分析:智能手环
一个典型的智能手环内部包含:
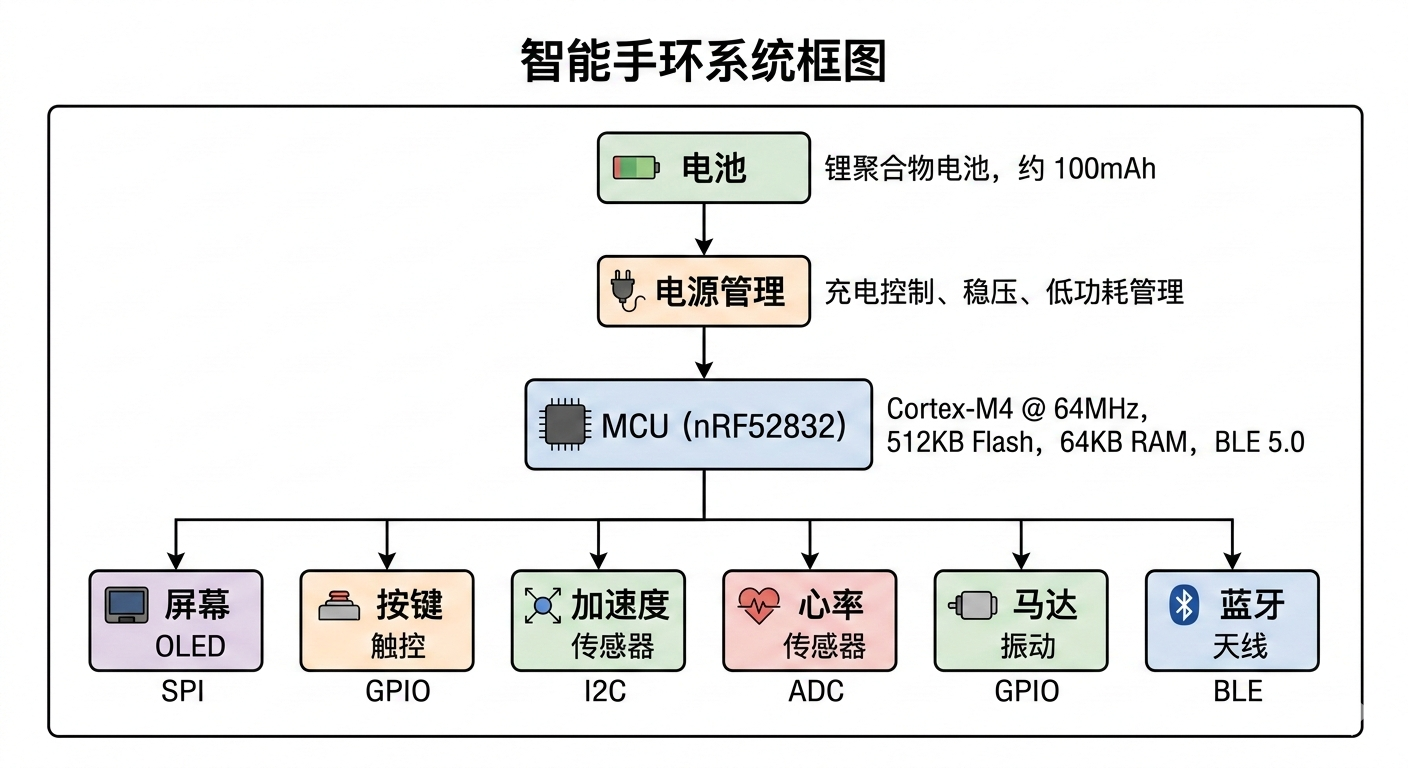
上图由AI生成
TIP
- 为什么要学习 SPI 通信(驱动屏幕)
- 为什么要学习 I2C 通信(读取传感器)
- 为什么要学习 ADC(采集模拟信号)
- 为什么要学习低功耗模式(延长设备工作时长)
3.3 家用电器
家用电器是单片机的重要应用领域,几乎每一个 智能 电器都内置了单片机。
| 产品 | 主要功能 | 涉及技术 |
|---|---|---|
| 洗衣机 | 进水排水控制、电机变频、程序选择、显示 | GPIO、PWM、ADC(水位)、段码 LCD |
| 微波炉 | 定时控制、功率调节、安全联锁 | 定时器、GPIO、继电器控制 |
| 变频空调 | 温度采集、压缩机变频、遥控接收 | ADC(NTC热敏电阻)、PWM、红外解码 |
| 电饭煲 | 温度控制(PID)、压力检测、程序 | ADC、PWM、段码 LCD |
| 扫地机器人 | 电机控制、避障、路径规划 | PWM、超声波/红外、编码器 |
3.4 工业控制
工业控制是单片机的传统强项,对实时性和可靠性要求很高。
| 设备 | 使用的外设 | 特殊要求 |
|---|---|---|
| PLC | GPIO、UART(Modbus)、CAN、ADC | 高可靠性、抗干扰 |
| 变频器 | 高级定时器(6 路 PWM)、ADC(电流采样)、编码器接口 | 高实时性、精确控制 |
| 数据采集 | 多路 ADC、UART/485、以太网 | 高精度、多通道 |
| 机械臂 | PWM(舵机)、编码器、CAN 总线 | 多轴协调、精确定位 |
NOTE
STM32F407 在工业控制中的优势
- 高级定时器:支持 6 路互补 PWM 输出,非常适合三相电机控制
- ADC 性能:3 个 ADC,最高 2.4 MSPS,可同时采样三相电流
- CAN 总线:2 个 CAN 控制器,支持工业现场总线
- DMA:数据传输不占用 CPU,提高实时性
3.5 汽车电子
现代汽车是 车轮上的计算机 ,一辆汽车可能包含几十个甚至上百个 MCU,尤其是现在我们国家的新能源汽车这么多。
| 系统 | 功能 | 典型 MCU |
|---|---|---|
| 车身控制(BCM) | 车窗、车灯、门锁 | STM32F1、NXP S32K |
| 仪表盘 | 速度、转速显示、告警灯 | STM32F4/F7(带图形界面) |
| 发动机控制(ECU) | 喷油、点火、排放 | Infineon TriCore(功能安全) |
| ADAS | 雷达、摄像头处理 | NXP i.MX、TI TDA |
| BMS(电池管理) | 电压/温度监测、均衡 | STM32G4、TI BQ 系列 |
WARNING
汽车电子的特殊要求
汽车电子对安全性要求极高,使用的 MCU 需要满足功能安全标准(如 ISO 26262)。这些芯片通常价格较贵,开发流程也更严格。普通的 STM32 一般用于车身控制等非安全关键系统,而刹车、转向等系统需要使用专门的汽车级 MCU。
3.6 物联网 (IoT)
物联网是当前最热门的应用领域之一,将各种设备连接到互联网,实现远程监控和智能化。
| 应用 | 涉及技术 | 典型方案 |
|---|---|---|
| 智能门锁 | BLE/WiFi、指纹识别、电机驱动 | STM32 + ESP32 |
| 环境监测 | 多种传感器、LoRa/NB-IoT 通信 | STM32L + LoRa 模块 |
| 智慧农业 | 土壤/光照传感器、电磁阀控制、太阳能供电 | 低功耗 MCU + LoRa |
| 共享单车锁 | GPS 定位、蜂窝通信、电机控制 | STM32 + 4G 模块 |
物联网设备的典型架构:
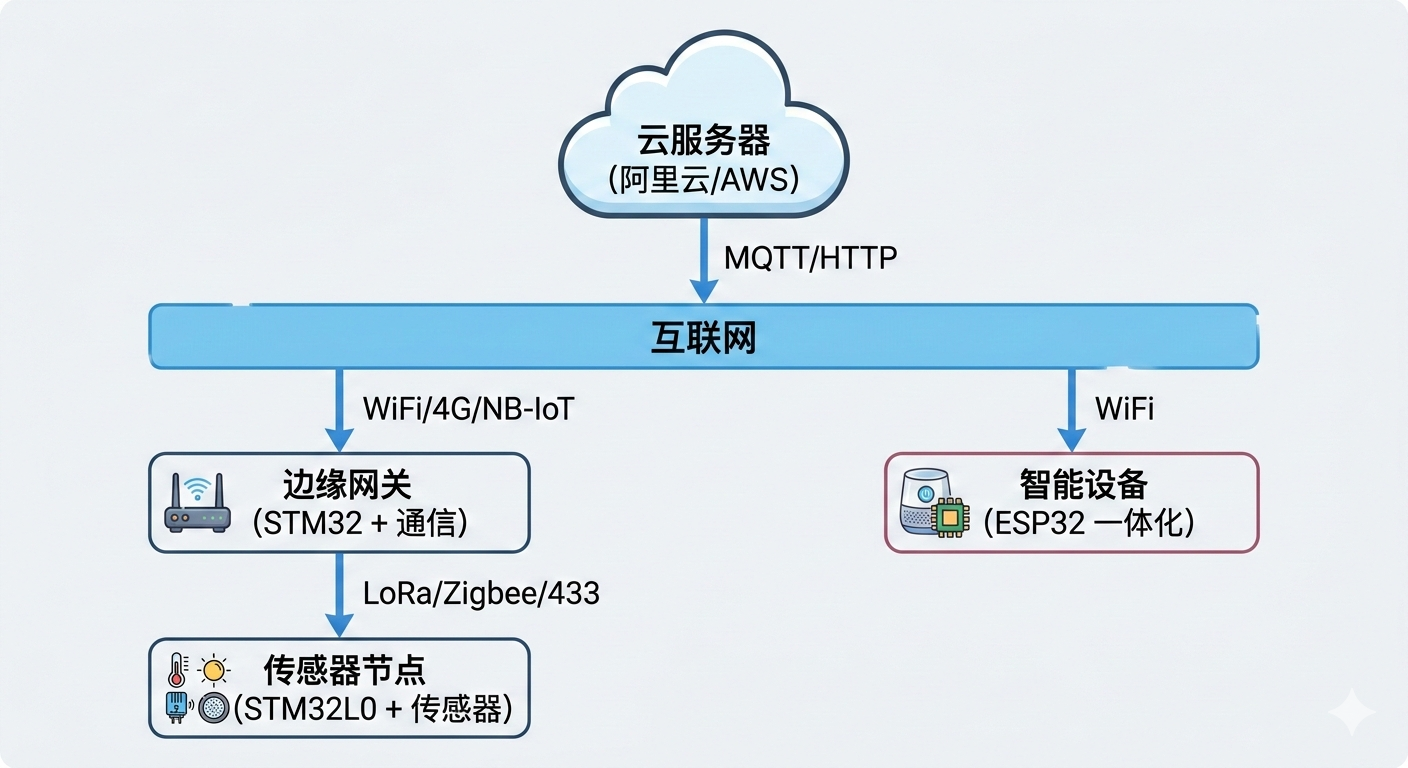
上图由AI生成
3.7 医疗设备
医疗设备对精度和可靠性要求很高,是单片机的重要应用领域。
| 设备 | 主要技术 | 特殊要求 |
|---|---|---|
| 电子血压计 | 压力传感器(ADC)、气泵控制(PWM)、算法 | 测量精度、认证 |
| 血糖仪 | 电化学传感器(模拟前端)、显示、存储 | 一致性、稳定性 |
| 心电仪 | 高精度 ADC、滤波算法、波形显示 | 低噪声、高精度 |
| 呼吸机 | 压力/流量传感器、电机控制(PID)、报警 | 高可靠性、安全冗余 |
| 输液泵 | 步进电机精确控制、气泡检测、多重保护 | 功能安全 |
NOTE
医疗设备通常需要通过严格的认证(如 FDA、CE 医疗),开发周期较长,但利润率也较高。如果你对医疗电子感兴趣,可以关注 STM32 的医疗应用方案。
3.8 创客热门项目
作为学习者,以下是一些适合练手的项目:
| 项目 | 难度 | 涉及知识 |
|---|---|---|
| LED 点阵屏 | ★☆☆☆☆ | GPIO、定时器 |
| 智能温控风扇 | ★★☆☆☆ | ADC(温度传感器)、PWM |
| 简易示波器 | ★★★☆☆ | ADC(高速采样)、LCD 显示 |
| 平衡小车 | ★★★★☆ | I2C/SPI(陀螺仪)、PWM(电机)、PID 控制 |
| 四轴无人机 | ★★★★★ | IMU、PWM(电调)、PID/姿态解算 |
| 智能家居网关 | ★★★★☆ | WiFi、MQTT、多种传感器 |
TIP
项目选择建议
学习嵌入式,做项目是最快的进步方式。建议按照以下顺序:
- 先完成本教程的基础实验(点灯、按键、串口等)
- 选择一个感兴趣的项目,边做边学
- 遇到问题就去查资料,这个过程会让你快速成长
- 完成项目后,写一个总结文档,巩固所学知识
3.9 身边的单片机小练习
下次当你使用某个电子设备时,不妨思考一下:
- 它里面有没有单片机?
- 单片机大概需要完成哪些功能?
- 需要用到哪些外设(GPIO、ADC、UART、PWM...)?
- 对实时性、功耗、成本有什么要求?
这种思考方式会帮助你建立【嵌入式思维】,让你更好地理解为什么要学习这些知识。
思考练习:
电动车充电器:
- 需要检测什么信号?(电压、电流、温度)
- 如何控制充电过程?(恒流→恒压)
- 使用什么通信方式显示状态?(段码 LCD?LED?)
智能门铃:
- 按键触发后要做什么?(发送 WiFi 通知?响铃?)
- 如何实现低功耗待机?
- 如果加上摄像头,对 MCU 性能有什么要求?
你身边还有什么设备可能使用了单片机?
看完这些应用场景后,再回到工程选型和学习路线,就更容易理解为什么有些项目适合 MCU,有些项目更适合树莓派、PLC 或 Linux 级平台。
四 单片机和常见计算平台的区别
4.1 单片机和普通电脑有什么区别?
很多同学会问:既然单片机能写程序,电脑也能写程序,它们本质上是不是一样?
从 都是计算机系统 这个角度看,它们确实有相通之处:都有 CPU、存储器、输入输出和程序。但工程定位完全不同。
| 对比项 | 单片机 MCU | 普通电脑 PC |
|---|---|---|
| 主要目标 | 控制设备、采集信号、实时响应 | 通用计算、办公、娱乐、复杂软件 |
| 启动方式 | 上电后直接运行固件 | BIOS/UEFI 引导操作系统 |
| 操作系统 | 可裸机运行,也可运行 RTOS | 一般运行 Windows/Linux/macOS |
| 存储规模 | KB 到 MB 级 Flash/RAM | GB 到 TB 级内存/硬盘 |
| 外设接口 | GPIO、ADC、PWM、UART、SPI、I2C 等 | USB、PCIe、显示器、网卡、硬盘等 |
| 实时性 | 强,能微秒级响应外部事件 | 通用系统实时性较弱 |
| 功耗 | mW 到 W 级 | 十几 W 到几百 W |
| 成本 | 几毛到几十元常见 | 几百到几千元 |
普通电脑像一个多功能办公室,什么都能干,但成本高、功耗高、启动复杂。
单片机像一个专门训练过的值班员,任务单一,但反应快、成本低、能一直守在那里。
4.2 单片机和树莓派有什么区别?
树莓派这类板子一般叫 SBC,也就是单板计算机(Single Board Computer)。它更接近一台小电脑,通常运行 Linux。我们立创开发板推出的泰山派系列开发板和树莓派是同一定位。
树莓派适合:
- 图形界面。
- Python 应用。
- 网络服务。
- 图像处理。
- AI 推理。
- 文件系统和复杂协议。
单片机适合:
- 精确控制 GPIO。
- 产生稳定 PWM。
- 微秒级定时。
- 低功耗待机。
- 直接采集 ADC。
- 控制电机、电源、传感器。
在实际项目里,两者经常配合使用:
- 树莓派负责上层业务、视觉、网络、数据库。
- 单片机负责底层实时控制、电机、传感器、安全保护。
比如一台智能小车,上层可以用树莓派做摄像头识别,下层用 STM32 控制电机和编码器。这样分工比让树莓派直接控制所有实时信号更稳。
4.3 单片机和 PLC 有什么区别?
PLC(Programmable Logic Controller,可编程逻辑控制器)在工业现场很常见。它本质上也是控制器,但定位和单片机不同。
| 对比项 | 单片机 | PLC |
|---|---|---|
| 主要用户 | 嵌入式工程师、电子工程师 | 电气工程师、自动化工程师 |
| 开发方式 | C/C++、汇编、RTOS、寄存器、驱动 | 梯形图、功能块、结构化文本 |
| 硬件形态 | 芯片或开发板,需要自己设计电路 | 工业模块化设备,接线即可用 |
| 环境适应 | 取决于设计能力 | 工业抗干扰能力强 |
| 成本 | 大批量成本低 | 单台成本较高 |
| 灵活性 | 高,可深度定制 | 适合标准工业控制 |
如果你要做一个消费电子产品、传感器节点、电机控制板,通常会用单片机。
如果你要做工厂产线控制、标准电柜、工业设备联锁,PLC 往往更省心,会更稳定。
4.4 单片机和 MPU、SoC 的区别
在芯片选型时还会遇到几个概念:
- MCU:微控制器,片上集成 Flash、SRAM 和丰富控制外设。
- MPU:微处理器,通常需要外接 DDR、Flash/EMMC,适合跑 Linux。
- SoC:片上系统,集成 CPU、GPU、NPU、视频编解码、复杂高速接口等。
简单理解:
控制类任务:优先 MCU
复杂操作系统和应用:考虑 MPU/SoC
两者都有:MCU + MPU 分工协作对于本教程使用的天空星 STM32F407 来说,它属于典型的高性能 MCU,而不是 Linux 级别的 MPU。泰山派开发板上面的RK3566和RK3576都属于MPU。
明确了不同平台的定位之后,下一步就要看 MCU 自身的核心参数:比如 8 位、32 位、64 位到底是什么意思,以及这些数字会怎样影响编程、存储器和芯片选型。
五 8 位、32 位、64 位,说的是什么?
我们经常听到 8 位单片机 、 2 位单片机、 64 位电脑 这样的说法,这里的 位 到底指什么?
5.1 位宽:数据处理的"车道宽度"
这里的【位】指的是处理器的数据位宽,更具体地说,是 CPU 内部寄存器的宽度 以及 数据总线的宽度。
你可以把它想象成公路的车道数:
- 8 位:就像一条 8 车道的公路,CPU 一次能处理 8 位(1 字节)的数据。
- 16 位:16 车道,一次处理 16 位(2 字节)。
- 32 位:32 车道,一次处理 32 位(4 字节)。
- 64 位:64 车道,一次处理 64 位(8 字节)。
车道越宽,单位时间内能通过的 车辆(数据)就越多,处理效率就越高。
5.1.1 位宽的具体体现
位宽体现在 CPU 的多个方面:
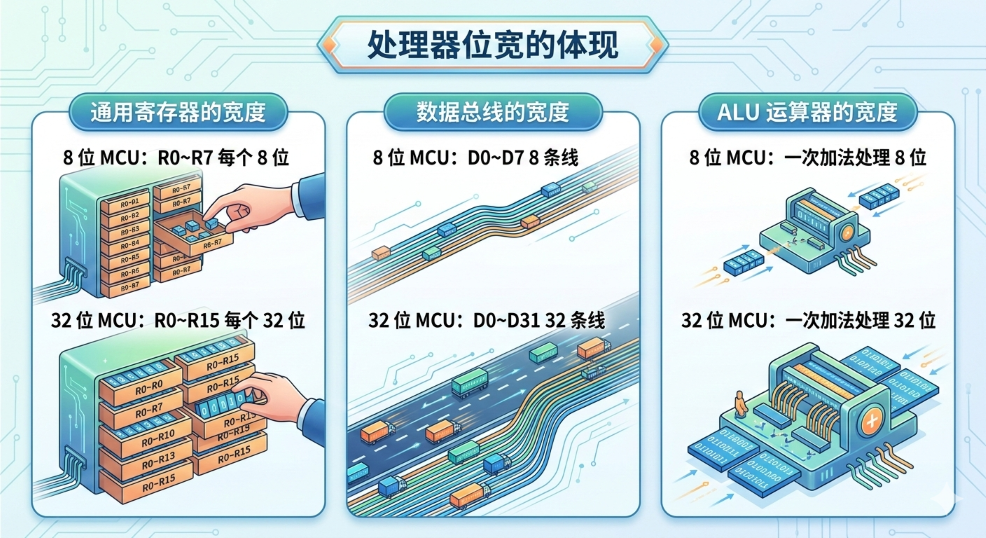
上图由AI生成
通俗解释:
| 位宽 | 一次能处理的数据 | 数值范围 | 类比 |
|---|---|---|---|
| 8 位 | 1 字节 | 0 ~ 255 | 一只手数数(0~10) |
| 16 位 | 2 字节 | 0 ~ 65,535 | 两只手数数 |
| 32 位 | 4 字节 | 0 ~ 4,294,967,295 | 一个计算器 |
| 64 位 | 8 字节 | 0 ~ 18,446,744,073,709,551,615 | 一台超级计算器 |
5.1.2 位宽对编程的影响
位宽直接影响我们在编程时使用的数据类型。让我们看一个具体例子:
// 8 位单片机上
unsigned char a = 200; // 8 位变量,范围 0-255,正常
unsigned char b = 100;
unsigned char sum = a + b; // 结果 300,但 8 位只能存 0-255!
// 实际得到 300 - 256 = 44(溢出)
// 32 位单片机上
uint32_t a = 200; // 32 位变量
uint32_t b = 100;
uint32_t sum = a + b; // 结果 300,完全没问题WARNING
数据溢出是嵌入式编程中常见的 Bug 来源!在 8 位单片机上处理较大的数值时,必须特别注意变量类型的选择。即使在 32 位单片机上,也要养成检查数据范围的习惯。当然我上面举的这个例子可能不太符合,毕竟8位单片机在实际编程时也是可以用32位变量的,只是他不能在一次指令周期处理完而已。
位宽与运算效率的关系:
// 假设我们要计算一个 32 位整数的平方
uint32_t x = 12345;
uint32_t result = x * x;
// 在 8 位单片机上:
// - CPU 一次只能处理 8 位
// - 32 位乘法需要拆成多次 8 位运算
// - 可能需要几十甚至上百个时钟周期
// 在 32 位单片机上:
// - CPU 一次就能处理 32 位
// - 一条 MUL 指令就能完成
// - 只需要几个时钟周期5.2 各个位宽的典型代表
| 位宽 | 典型产品 | 应用场景 | 代表性能 |
|---|---|---|---|
| 8 位 | Intel 8051、AVR ATmega、PIC16、STC | 简单控制、低成本应用 | 1x |
| 16 位 | MSP430、dsPIC、部分老式 x86 | 低功耗、信号处理 | 2-4x |
| 32 位 | STM32、ESP32、NXP LPC、TI TM4C | 主流嵌入式应用 | 10-100x |
| 64 位 | Intel/AMD x64、ARM Cortex-A 系列(手机、服务器) | PC、手机、服务器 | 100-1000x |
5.2.1 各位宽详细介绍
8 位单片机:
- 代表产品:Intel 8051、Atmel AVR(如 ATmega328P,Arduino 用的芯片)、Microchip PIC、STC 宏晶
- 主频范围:通常 1 MHz ~ 50 MHz
- RAM 大小:通常 128 字节 ~ 几 KB
- 适用场景:
- LED 控制、简单的按键检测
- 小家电控制(如电风扇、简单遥控器)
- 成本敏感的大批量产品
- 教学和入门学习
16 位单片机:
- 代表产品:TI MSP430、Microchip dsPIC、部分早期 Intel x86
- 主频范围:通常 8 MHz ~ 80 MHz
- RAM 大小:通常 几 KB ~ 几十 KB
- 适用场景:
- 超低功耗应用(如电池供电的传感器节点)
- 需要一定数学运算的场合(DSP 功能)
- 仪器仪表
NOTE
16 位单片机曾经是一个重要的 过渡 品类,但随着 32 位单片机价格下降,16 位市场逐渐萎缩。目前主要在超低功耗和特定 DSP 应用领域还有一席之地。
32 位单片机:
- 代表产品:STM32、ESP32、NXP LPC、TI TM4C、Renesas RA、GD32、HC32 等
- 主频范围:通常 24 MHz ~ 480 MHz
- RAM 大小:通常 几十 KB ~ 几百 KB,部分高端型号可达 1MB+
- 适用场景:
- 几乎所有现代嵌入式应用
- 物联网设备、工业控制
- 消费电子、可穿戴设备
- 需要运行 RTOS 的复杂系统
- 图形界面、触摸屏
64 位处理器:
- 代表产品:Intel Core、AMD Ryzen(PC)、ARM Cortex-A(手机、树莓派)
- 主频范围:通常 1 GHz ~ 5 GHz
- RAM 大小:通常 几 GB ~ 几百 GB
- 适用场景:
- 个人电脑、笔记本
- 智能手机、平板电脑
- 服务器、云计算
- 需要运行完整操作系统(Windows、Linux、macOS、Android)
TIP
如何选择位宽?
- 如果是简单控制,成本第一:选 8 位
- 如果需要超低功耗,续航第一:考虑 16 位(如 MSP430)或 32 位低功耗系列(如 STM32L)
- 如果是一般嵌入式应用:选 32 位(如 STM32)
- 如果需要运行完整操作系统:选 64 位(如树莓派、手机 SoC)
5.3 位宽与寻址能力
位宽还影响寻址能力,即 CPU 能直接访问的内存地址空间大小。
5.3.1 寻址能力计算
地址总线位宽决定了 CPU 能访问多少个不同的内存地址:
- 8 位地址总线:
= 256 个地址 = 256 字节 - 16 位地址总线:
= 65,536 个地址 = 64KB - 20 位地址总线:
= 1,048,576 个地址 = 1MB(早期 x86 PC) - 32 位地址总线:
= 4,294,967,296 个地址 = 4GB - 64 位地址总线:
= 16 EB(艾字节, 字节)
IMPORTANT
这就是为什么 32 位 Windows 最多只能识别约 4GB 内存——32 位地址总线最多只能访问 4GB 的地址空间。如果你的电脑装了 8GB 内存但用的是 32 位系统,有一半内存是 看不到 的!
5.3.2 STM32 的存储器映射
对于单片机来说,STM32F407 是 32 位单片机,它的地址总线是 32 位的,理论上可以访问 4GB 的地址空间。虽然它实际只有几百 KB 的 Flash 和 RAM,但 4GB 的地址空间被用来统一编址:Flash、RAM、外设寄存器、系统控制块等都被映射到这 4GB 的不同区域。
STM32F407 的存储器映射(简化版):
| 地址范围 | 大小 | 用途 |
|---|---|---|
| 0x0000_0000 ~ 0x0007_FFFF | 512KB | Flash 程序存储器 |
| 0x0800_0000 ~ 0x080F_FFFF | 1MB | Flash 别名区(用于启动) |
| 0x1FFF_0000 ~ 0x1FFF_7FFF | 32KB | 系统存储器(ST 出厂固化的 Bootloader) |
| 0x2000_0000 ~ 0x2001_FFFF | 128KB | SRAM(主 RAM) |
| 0x2002_0000 ~ 0x2002_FFFF | 64KB | SRAM(CCM,仅 CPU 可访问,DMA无法访问) |
| 0x4000_0000 ~ 0x4007_FFFF | 512KB | APB1 外设寄存器 |
| 0x4001_0000 ~ 0x4007_FFFF | 448KB | APB2 外设寄存器 |
| 0x4002_0000 ~ 0x4007_FFFF | 384KB | AHB1 外设寄存器 |
| 0xE000_0000 ~ 0xE00F_FFFF | 1MB | Cortex-M4 内核外设(NVIC、SysTick 等) |
TIP
在后面的章节【如何理解寄存器】中,我们会详细介绍 STM32 的存储器映射和统一编址的概念。理解这个映射对于理解寄存器操作非常重要!
5.3.3 一个具体的例子
让我们通过一个例子来理解存储器映射的实际意义:
// 假设我们要控制 GPIOA 的第 0 个引脚
// 方法1:直接使用地址(不推荐,仅为说明原理)
// GPIOA 的 ODR 寄存器地址是 0x40020014
volatile uint32_t *GPIOA_ODR = (volatile uint32_t *)0x40020014;
*GPIOA_ODR |= (1 << 0); // 将 PA0 置高
// 方法2:使用 ST 提供的头文件定义(推荐)
// 头文件中已经定义了 GPIOA 结构体指向 0x40020000
GPIOA->ODR |= (1 << 0); // 同样的效果,但代码更清晰
// 方法3:使用专门的位操作寄存器(最推荐)
GPIOA->BSRR = (1 << 0); // 使用 BSRR 寄存器,原子操作地址 0x40020014 是怎么来的?
0x40000000:外设基地址0x00020000:GPIOA 相对于外设基地址的偏移0x00000014:ODR 寄存器相对于 GPIOA 基地址的偏移- 合计:
0x40020014
这就是统一编址的威力——所有资源(Flash、RAM、外设)都在同一个地址空间中,用相同的方式访问。
这部分内容我在【8】认识GPIO | 立创开发板技术文档中心部分有详细讲解。
六 ARM 公司与 ST 公司的关系
学习 STM32,你会频繁看到两个名字:ARM 和 ST。它们是什么关系呢?理解这两家公司的关系,有助于你更好地理解整个嵌入式行业的生态。
6.1 ARM 公司:不卖芯片的芯片巨头
ARM(Advanced RISC Machines) 是一家英国公司,总部位于剑桥,但它非常特别——ARM 公司自己不生产芯片!但是看最近的新闻好像要开始做AI芯片了。
6.1.1 ARM 的商业模式
ARM 公司的商业模式是设计 CPU 内核架构,然后将设计授权(License)给其他芯片厂商使用。这些厂商拿到授权后,在 ARM 内核的基础上,添加自己的外设(如 GPIO、UART、USB 等),封装成完整的芯片产品出售。
这种模式被称为 IP(Intellectual Property)授权,ARM 是这一模式的先驱和佼佼者。
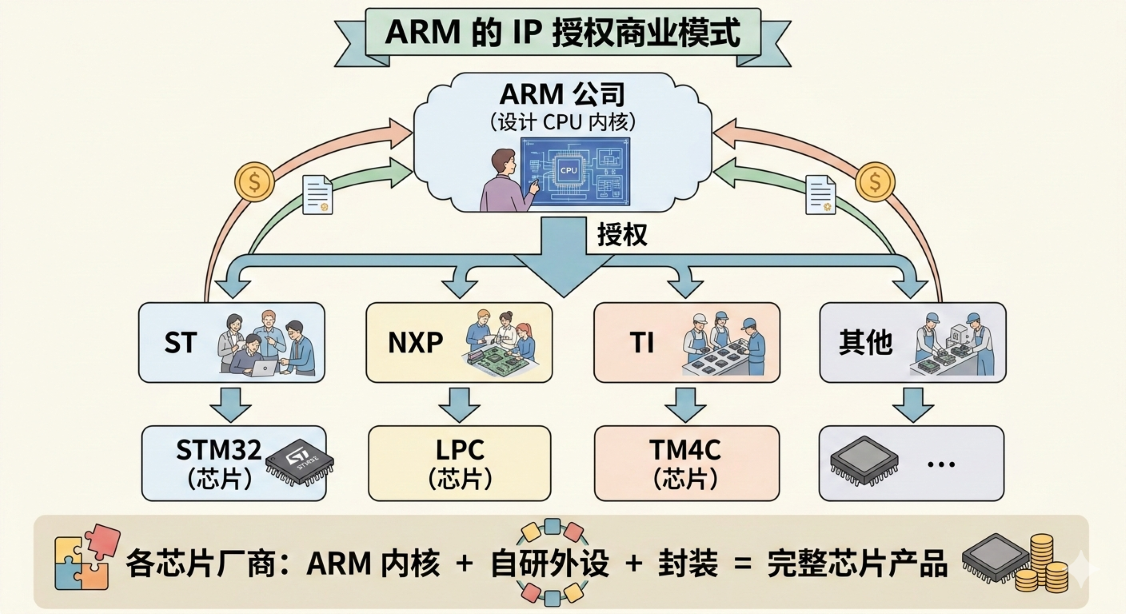
上图由AI生成
ARM 的授权模式分类:
| 授权类型 | 说明 | 典型客户 |
|---|---|---|
| 处理器授权 | 直接使用 ARM 设计好的内核 IP | ST、NXP、TI 等(大多数厂商) |
| 架构授权 | 只授权指令集,可自行设计微架构 | Apple(M 系列芯片)、高通(Kryo) |
| 灵活接入授权 | 针对初创企业,降低门槛 | 各种小型芯片公司 |
TIP
为什么这种模式能成功?
设计一个现代 CPU 内核需要巨额投资(数亿美元级别)和多年时间。如果每个芯片厂商都自己从头设计 CPU,成本太高、风险太大。ARM 模式让各厂商可以 站在巨人的肩膀上 ,专注于自己擅长的领域(外设设计、工艺制造),最终让消费者受益。
6.1.2 ARM 的历史简述
| 年份 | 里程碑 |
|---|---|
| 1983 | Acorn 公司开始设计 ARM 处理器(当时叫 Acorn RISC Machine) |
| 1985 | 第一款 ARM 处理器 ARM1 诞生 |
| 1990 | ARM 从 Acorn 分拆出来,成为独立公司 |
| 1991 | ARM6 处理器用于 Apple Newton PDA |
| 2004 | ARM Cortex 系列发布(Cortex-A、R、M) |
| 2016 | 日本软银以 320 亿美元收购 ARM |
| 2020 | 英伟达宣布收购 ARM(后于 2022 年失败) |
| 2023 | ARM 在纳斯达克上市,市值超 500 亿美元 |
6.1.3 ARM 的主要产品线
ARM 的主要产品线:
| 内核系列 | 定位 | 典型应用 | 主频范围 |
|---|---|---|---|
| Cortex-A | 高性能应用处理器 | 手机、平板、智能电视 | 1~3 GHz |
| Cortex-R | 实时处理器 | 汽车电子、硬盘控制器 | 200~1000 MHz |
| Cortex-M | 微控制器(单片机) | STM32、NXP LPC、TI TM4C | 24~480 MHz |
Cortex-M 系列详细对比:
STM32 使用的就是 Cortex-M 系列内核,其中各型号有不同定位:
| 内核 | 发布年份 | 特点 | 典型应用 | STM32 对应系列 |
|---|---|---|---|---|
| Cortex-M0 | 2009 | 极低功耗,最小面积 | 传感器节点、简单控制 | STM32F0、STM32G0 |
| Cortex-M0+ | 2012 | M0 改进版,更低功耗 | 可穿戴设备、电池供电产品 | STM32L0 |
| Cortex-M3 | 2004 | 经典平衡型,性能/功耗均衡 | 工业控制、消费电子 | STM32F1、STM32F2、STM32L1 |
| Cortex-M4 | 2010 | 带 DSP 和可选 FPU | 音频处理、电机控制、无人机 | STM32F4、STM32L4、STM32G4 |
| Cortex-M7 | 2014 | 高性能,6 级流水线,带 Cache | 高端 HMI、复杂算法 | STM32F7、STM32H7 |
| Cortex-M33 | 2016 | 带 TrustZone 安全特性 | 安全物联网、支付设备 | STM32L5、STM32U5 |
| Cortex-M55 | 2020 | 面向 AI/ML,带 Helium(MVE) | 边缘 AI、机器学习 | 未来新产品 |
我们天空星开发板使用的 STM32F407 搭载的就是 Cortex-M4 内核,主频高达 168 MHz,自带硬件 FPU,性能强劲。
IMPORTANT
Cortex-M4 的 FPU(浮点运算单元)
Cortex-M4 可选配硬件 FPU,STM32F407 就配备了 FPU。这意味着:
- 浮点运算(如
float a = 3.14 * 2.5;)可以在硬件中直接完成 - 相比软件模拟,速度提升 10~50 倍
- 对于需要大量浮点运算的应用(如姿态解算、FFT 变换)非常重要
使用 FPU 需要在编译器中正确配置,我们会在后续章节中讲解。
6.2 ST 公司:STM32 的缔造者
意法半导体(STMicroelectronics,简称 ST) 是一家总部位于瑞士日内瓦的跨国半导体公司,由意大利的 SGS 和法国的 Thomson 半导体于 1987 年合并而成。
ST 是全球领先的半导体厂商之一,产品线覆盖模拟芯片、传感器、功率器件、微控制器等多个领域。其中,STM32 系列微控制器是 ST 最知名的产品之一。
6.2.1 ST 公司概况
| 项目 | 信息 |
|---|---|
| 全称 | STMicroelectronics(意法半导体) |
| 成立时间 | 1987 年(SGS + Thomson 合并) |
| 总部 | 瑞士日内瓦 |
| 员工数 | 约 50,000 人(2023 年) |
| 年营收 | 约 160 亿美元(2022 年) |
| 主要产品 | 微控制器、传感器、功率器件、模拟芯片、汽车电子 |
| 上市地点 | 纽约证券交易所(NYSE: STM)、巴黎泛欧交易所 |
6.2.2 STM32 的诞生与发展
STM32 的诞生:
2007 年,ST 获得 ARM 公司的 Cortex-M3 内核授权,推出了第一款 STM32 产品——STM32F103。凭借出色的性价比和丰富的生态(完善的开发工具、库函数、文档、社区),STM32F103 迅速成为"爆款",至今仍是很多入门者的首选。
STM32 发展时间线:
| 年份 | 里程碑 |
|---|---|
| 2007 | 推出 STM32F1 系列(Cortex-M3),开创 STM32 时代 |
| 2011 | 推出 STM32F4 系列(Cortex-M4),带硬件 FPU |
| 2012 | 推出 STM32L0/L1 系列,主打超低功耗 |
| 2014 | 推出 STM32F7 系列(Cortex-M7),性能大幅提升 |
| 2015 | 推出 STM32CubeMX 图形化配置工具 |
| 2017 | 推出 STM32H7 系列,主频高达 480 MHz |
| 2019 | 推出 STM32G0/G4 系列,更新主流产品线 |
| 2020 | 推出 STM32L5/U5 系列(Cortex-M33),带安全特性 |
| 2021 | 推出 STM32CubeIDE 2.0,完善开发工具链 |
| 2023 | STM32 累计出货超过 100 亿颗! |
此后,ST 陆续推出了基于 Cortex-M0、M0+、M4、M7、M33 等内核的 STM32 产品线,覆盖从超低功耗到高性能的各种应用场景。
6.2.3 STM32 产品系列一览
STM32 产品线非常丰富,可以按照定位分为几大类:
| 系列 | 内核 | 主频 | 定位 | 典型应用 |
|---|---|---|---|---|
| STM32F0 | Cortex-M0 | 48 MHz | 入门级,替代 8/16 位 | 简单控制、成本敏感 |
| STM32G0 | Cortex-M0+ | 64 MHz | F0 升级版 | 消费电子、工业 |
| STM32F1 | Cortex-M3 | 72 MHz | 经典入门 | 教学、通用控制 |
| STM32F2 | Cortex-M3 | 120 MHz | F1 升级版 | 需要加密、安全 |
| STM32L0 | Cortex-M0+ | 32 MHz | 超低功耗 | 电池供电、传感器 |
| STM32L1 | Cortex-M3 | 32 MHz | 低功耗 | 手持设备、仪表 |
| STM32L4 | Cortex-M4 | 80 MHz | 低功耗+高性能 | 可穿戴、医疗 |
| STM32L5 | Cortex-M33 | 110 MHz | 低功耗+安全 | IoT、支付设备 |
| STM32U5 | Cortex-M33 | 160 MHz | 超低功耗+安全 | 边缘 AI、高端 IoT |
| STM32F3 | Cortex-M4 | 72 MHz | 混合信号 | 电机控制、电源 |
| STM32F4 | Cortex-M4 | 168 MHz | 高性能 | 无人机、HMI、音频 |
| STM32G4 | Cortex-M4 | 170 MHz | F3/F4 升级版 | 电机控制、数字电源 |
| STM32F7 | Cortex-M7 | 216 MHz | 高端 | 图形界面、工业 |
| STM32H7 | Cortex-M7 | 480 MHz | 旗舰级 | 高端 HMI、视频处理 |
NOTE
我们使用的 STM32F407 属于 STM32F4 系列,是 ST 的高性能系列产品。它具有:
- 168 MHz 主频(可超频到 180 MHz)
- Cortex-M4 内核,带硬件 FPU
- 128 KB SRAM + 64 KB CCM
- 512 KB ~ 2 MB Flash
- 丰富的外设:USB OTG、CAN、以太网、SDIO、FSMC 等
这使得 STM32F407 非常适合学习——性能足够强,可以做很多有趣的项目;同时价格适中,不会造成学习成本负担。
6.2.4 ST 的生态系统
ST 不仅提供芯片,还提供了完整的开发生态系统:
| 资源 | 说明 |
|---|---|
| STM32CubeIDE | 免费的集成开发环境,基于 Eclipse |
| STM32CubeMX | 图形化配置工具,自动生成初始化代码 |
| HAL 库 | 硬件抽象层库,简化外设操作 |
| LL 库 | 底层库,接近寄存器操作,效率更高 |
| STM32Cube 固件包 | 每个系列都有对应的固件包,包含例程 |
| 开发板 | Nucleo、Discovery 系列官方开发板 |
| ST-LINK | 官方调试器/编程器 |
| 官方论坛 | ST 社区论坛,有工程师答疑 |
| 文档资料 | 数据手册、参考手册、应用笔记,质量很高 |
TIP
生态系统的重要性
选择一款单片机,不仅要看芯片本身的性能,更要看它的生态系统。好的生态意味着:
- 遇到问题容易找到解决方案(教程、论坛、例程)
- 开发工具完善,减少踩坑时间
- 有大量现成的库和驱动可以使用
- 找工作时,更多公司在用
STM32 的生态系统是目前 32 位单片机中最完善的,这也是它成功的关键因素之一。
6.3 两者的关系总结
用一句话概括:
ARM 提供 心脏 (CPU 内核),ST 提供 身体(外设、封装、工具链)。
6.3.1 从设计到你手中的完整链条
让我们用一张图来展示 STM32F407 芯片从设计到你手中的完整过程:

上图由AI生成
6.3.2 这种分工合作的优势
这种分工合作的模式,让 ARM 可以专注于内核的创新和优化,而各芯片厂商可以发挥自己在外设设计、工艺制造、市场推广方面的优势,最终让消费者受益。
| 参与者 | 专注领域 | 优势 |
|---|---|---|
| ARM | CPU 内核设计 | 世界顶级的处理器架构团队,持续创新 |
| ST | 外设设计、系统集成 | 丰富的外设 IP、成熟的工艺、完善的生态 |
| 晶圆厂 | 芯片制造 | 先进的制造工艺、大规模生产能力 |
| 开发板厂商 | 应用方案 | 立创开发板贴近用户需求、提供学习和原型验证平台 |
NOTE
为什么不同厂商的 Cortex-M4 芯片不完全兼容?
虽然 STM32F4、GD32F4、N32G4 等芯片都使用 Cortex-M4 内核,但它们的外设是各家自己设计的。所以:
- CPU 指令集是兼容的(都是 ARM 指令集)
- 内核外设(NVIC、SysTick)是兼容的(ARM 定义的)
- 厂商外设(GPIO、UART、ADC 等)可能不兼容(各家自己设计的)
这就是为什么 GD32 和 STM32 虽然 高度兼容 ,但在细节上仍有差异。
七 国内外的 32 位单片机厂商
除了 ST 的 STM32,市面上还有很多优秀的 32 位单片机厂家。了解这些厂商,对于芯片选型、拓宽视野都很有帮助。
7.1 国际厂商
7.1.1 主要厂商一览
| 代表产品 | 内核 | 特点 |
|---|---|---|
| STM32 系列 | Cortex-M0/M0+/M3/M4/M7/M33 | 生态完善,市场占有率最高 |
| LPC 系列、i.MX RT 系列 | Cortex-M0+/M3/M4/M7 | 汽车电子、工业控制强势 |
| MSP432、TM4C 系列 | Cortex-M4 | 低功耗、模拟外设强 |
| SAM 系列(原 Atmel) | Cortex-M0+/M4/M7 | 收购 Atmel 后产品线丰富 |
| XMC、PSoC 系列 | Cortex-M0/M4 | 工业、汽车、电机控制 |
| RA 系列 | Cortex-M4/M33 | 工业控制、IoT |
| EFM32 系列 | Cortex-M0+/M3/M4 | 低功耗、无线 |
| nRF52、nRF53 系列 | Cortex-M4/M33 | 蓝牙低功耗(BLE)首选 |
7.1.2 各厂商详细介绍
ST(意法半导体)
- 总部:瑞士日内瓦
- 优势:生态系统最完善,文档质量高,社区活跃,产品线覆盖全面
- 劣势:价格相对较高,2021 年疫情期间缺货严重
- 推荐场景:学习入门、通用嵌入式开发、需要完善技术支持的项目
NXP(恩智浦)
- 总部:荷兰埃因霍温
- 前身:飞利浦半导体,2015 年收购飞思卡尔
- 优势:汽车电子领域龙头,工业控制经验丰富,i.MX RT 系列性能强劲
- 推荐场景:汽车电子、工业控制、需要高性能 MCU 的应用
TI(德州仪器)
- 总部:美国德克萨斯州达拉斯
- 优势:模拟外设(ADC、DAC、运放)业界领先,低功耗技术成熟
- 推荐场景:需要高精度模拟信号处理、超低功耗应用
Nordic
- 总部:挪威奥斯陆
- 优势:蓝牙低功耗(BLE)领域绝对领先,SDK 完善
- 推荐场景:蓝牙设备、可穿戴、无线传感器
7.2 国产厂商
近年来,国产 32 位单片机发展迅猛,在性价比和本土支持方面具有优势。特别是在 2020-2022 年芯片短缺期间,国产芯片为很多企业解决了燃眉之急。我们的天空星核心板在设计之初就考虑到了国产替代,也同步推出了GD32版本和HC32版本,他们用的都是同一块PCB,只不过上面贴的器件不一样。
7.2.1 主要厂商一览
| 厂商 | 代表产品 | 内核 | 特点 |
|---|---|---|---|
| 兆易创新 (GigaDevice) | GD32 系列 | Cortex-M3/M4/M23/M33 | 与 STM32 高度兼容,性价比高 |
| 华大半导体 (HDSC) | HC32 系列 | Cortex-M0+/M4 | 低功耗、工业应用 |
| 航顺芯片 (HK32) | HK32 系列 | Cortex-M0/M3 | 替代 STM32F0/F1 |
| 灵动微电子 (MindMotion) | MM32 系列 | Cortex-M0/M3 | 电机控制、工业 |
| 国民技术 (Nations) | N32 系列 | Cortex-M4 | 安全芯片、加密 |
| 中微半导体 (CMS) | CMS32 系列 | Cortex-M0+ | 家电、消费电子 |
| 沁恒微电子 (WCH) | CH32V/F 系列 | RISC-V / Cortex-M3 | 低成本、USB 特色 |
| 先楫半导体 (HPMicro) | HPM6000 系列 | RISC-V | 高性能 RISC-V,工业实时 |
| 博流智能 (Bouffalo Lab) | BL602、BL808 系列 | RISC-V | WiFi/蓝牙、AIoT |
| Espressif (乐鑫) | ESP32 系列 | Xtensa LX6/LX7 或 RISC-V | WiFi/蓝牙,IoT 热门 |
7.2.2 重点国产芯片介绍
GD32(兆易创新)
GD32 是国产 32 位 MCU 的代表,与 STM32 高度兼容:
| 对比项 | GD32F103 | STM32F103 |
|---|---|---|
| 内核 | Cortex-M3 | Cortex-M3 |
| 主频 | 108 MHz | 72 MHz |
| Flash | 16KB ~ 3MB | 16KB ~ 1MB |
| RAM | 6KB ~ 96KB | 6KB ~ 96KB |
| 价格 | 较低 | 较高 |
| 兼容性 | 引脚/寄存器高度兼容 | - |
NOTE
GD32 的 超频
你可能注意到 GD32F103 的主频是 108 MHz,而 STM32F103 只有 72 MHz。这是因为 GD32 使用了更先进的制造工艺,在保持兼容的同时提升了性能。但这也意味着在某些时序敏感的场合,可能需要调整参数。
CH32(沁恒微电子)
沁恒微电子的 CH32 系列以超低成本和USB 特性著称:
- CH32V003:RISC-V 内核,48 MHz,只需几毛钱!
- CH32F103:Cortex-M3 内核,与 STM32F103 兼容
- 特色:内置 USB,不需要外部 USB 芯片
HPM(先楫半导体)
先楫是国产高性能 RISC-V MCU 的代表:
- HPM6750:双核 RISC-V,主频高达 816 MHz!
- 定位:工业实时控制、电机驱动、高端 HMI
- 特点:与 STM32H7 同等性能,但采用开源的 RISC-V 架构
Espressif(乐鑫)
- 总部:中国上海(但产品面向全球)
- 优势:高性价比 WiFi/蓝牙 SoC,ESP32 是 IoT 领域的明星产品
- 推荐场景:WiFi 联网项目、智能家居、物联网原型
TIP
如何选择芯片厂商?
不同厂商有不同的强项:
- 通用开发、学习入门 → STM32
- 汽车电子、工业控制 → NXP、Infineon
- 蓝牙设备 → Nordic
- WiFi 联网 → Espressif ESP32
- 超低功耗 → TI MSP430、STM32L、Silicon Labs EFM32
- 成本敏感 → 国产芯片(GD32、CH32 等)
7.2.3 为什么要关注国产芯片?
- 供应链安全:2020-2022 年的芯片短缺让很多企业意识到,不能只依赖进口芯片
- 性价比:同等性能下,国产芯片通常更便宜
- 技术支持:国产厂商提供中文文档、本地 FAE 支持,沟通更顺畅
- 政策支持:国家鼓励使用国产芯片,部分项目有要求
- 技术进步:国产芯片的质量和性能已经接近甚至赶上国际水平
IMPORTANT
学习建议
虽然国产芯片发展迅速,但对于初学者,我们仍然推荐先学习 STM32:
- STM32 的学习资料最丰富,遇到问题容易找到答案
- STM32 的生态最完善,开发效率高
- 学会 STM32 后,迁移到 GD32 等国产芯片非常容易(很多是兼容的)
- STM32 在求职市场上认可度最高
等你熟练掌握 STM32 后,再学习其他芯片会事半功倍。天空星核心板也有国内芯片版本,大家学习好STM32版本天空星之后也可以去试试我们的国产芯片版本。
7.3 RISC-V:新兴的开源架构
在介绍国产厂商时,你可能注意到很多产品使用了 RISC-V 内核。RISC-V 是近年来兴起的开源指令集架构,值得关注。
7.3.1 RISC-V 简介
| 项目 | 说明 |
|---|---|
| 全称 | Reduced Instruction Set Computing - V(第五代精简指令集) |
| 诞生 | 2010 年,加州大学伯克利分校 |
| 特点 | 完全开源,任何人都可以免费使用,无需支付授权费 |
| 现状 | 获得阿里、华为、谷歌等巨头支持,生态快速发展 |
7.3.2 RISC-V vs ARM
| 对比项 | ARM | RISC-V |
|---|---|---|
| 授权费用 | 需要支付高昂授权费 | 免费开源 |
| 生态成熟度 | 非常成熟 | 快速发展中 |
| 工具链 | 完善 | 基本完善(GCC、LLVM) |
| 厂商支持 | 几乎所有主流厂商 | 阿里平头哥、沁恒、先楫、博流等 |
| 适合场景 | 商业产品首选 | 成本敏感、需要定制化 |
TIP
RISC-V 的未来
很多人认为 RISC-V 会成为 ARM 的有力竞争者。对于学习者来说:
- 目前阶段,建议以 ARM(STM32)为主,资料多、工作机会多
- 关注 RISC-V 的发展,可以在学有余力时尝试 CH32V、ESP32-C3 等 RISC-V 产品
- 核心的嵌入式思想(GPIO、中断、定时器等)在任何架构上都是通用的
八 单片机内部到底有什么?
8.1 CPU:负责执行指令的大脑
CPU 是单片机里真正执行程序的部分。
我们写的 C 代码:
led_on();
delay_ms(500);
led_off();最终会被编译器转换成 CPU 能理解的机器指令。CPU 一条条取出这些指令,然后执行对应操作。
CPU 做的事情大致包括:
- 从 Flash 中取指令。
- 对寄存器和内存中的数据进行计算。
- 根据条件跳转到不同代码位置。
- 读写外设寄存器。
- 响应中断。
天空星 STM32F407 使用的是 ARM Cortex-M4F 内核,带硬件浮点单元 FPU 和 DSP 指令。对于控制算法、滤波、姿态解算、音频处理等任务,比很多入门级 MCU 更有优势。
NOTE
Cortex-M4F 里的 F 代表 Floating-point,也就是硬件浮点支持,它在做浮点运算时效率更高。
8.1.1 CPU 执行程序的三个基本动作
为了让初学者真正理解 CPU 在干什么,我们可以把 CPU 执行程序简化成三个动作:
- 取指令(Fetch):从 Flash 或 SRAM 中取出下一条要执行的机器指令。
- 译码(Decode):判断这条指令要做什么,是加法、跳转、读内存,还是写寄存器。
- 执行(Execute):真正完成这条指令对应的操作。
这个过程会不断重复:
取指令 -> 译码 -> 执行 -> 取下一条指令 -> 译码 -> 执行 -> ...如果程序里有 if、while、函数调用、中断返回,本质上就是改变 下一条指令从哪里取 。
比如:
if (key_pressed)
{
led_on();
}
else
{
led_off();
}CPU 并不是看懂了 按键 和 灯 的概念,它只是在执行一组比较、跳转、写寄存器的机器指令。真正让 LED 亮灭的,是最后那一步写 GPIO 外设寄存器。
8.1.2 寄存器不是只有外设寄存器
GPIO 寄存器、USART 寄存器、TIM 寄存器,这些都是外设寄存器。但 CPU 内部自己也有寄存器。
以 Cortex-M4 为例,它内部有通用寄存器、栈指针、链接寄存器、程序计数器和状态寄存器等。初学阶段不需要全部知道,但要先大概知道它们的作用:
| CPU 内部寄存器 | 作用 |
|---|---|
| R0~R12 | 通用寄存器,用来暂存计算数据和函数参数 |
| SP | Stack Pointer,栈指针,指向当前栈顶 |
| LR | Link Register,链接寄存器,保存函数返回地址 |
| PC | Program Counter,程序计数器,指向下一条要执行的指令 |
| xPSR | 程序状态寄存器,保存条件标志、中断状态等 |
举个例子,当我们调用一个函数时,CPU 要知道函数执行完应该回到哪里,这个返回地址通常就会和 LR、栈有关。当发生中断时,CPU 会自动把一部分现场压入栈中,中断处理完再恢复现场。
TIP
初学者暂时不必深入汇编,但一定要知道 函数调用 和 中断响应 都不是凭空发生的,它们背后有 CPU 寄存器和栈在配合工作。这个认知对以后分析 HardFault、栈溢出和程序跑飞非常有用。
8.2 Flash:存放程序的仓库
Flash 是单片机内部的非易失性存储器。所谓非易失性,就是掉电后内容不会消失。
我们通过下载器或串口把程序烧录进去,本质上就是把编译后的机器码写入 Flash。
上电后,CPU 会从指定地址开始读取 Flash 里的指令并执行。对于大多数正常启动的 STM32 工程来说,程序就存放在内部 Flash 中。
常见问题:
- Flash 不够:程序太大、图片字库太多、协议栈太复杂。
- Flash 擦写次数有限:不适合频繁当普通存储使用。
- Flash 写入需要按页擦除:保存参数时要考虑磨损均衡和掉电保护。
工程师在实际项目中,经常会把 Flash 分区:
| 区域 | 用途 |
|---|---|
| Bootloader 区 | 负责升级、校验和跳转到应用程序 |
| App 区 | 存放主业务程序 |
| 参数区 | 存放设备配置、校准参数、序列号等 |
| 备份区 | OTA 或双镜像升级时使用 |
初学阶段不需要马上实现这些,但要知道:Flash 不是只用来 放代码 ,在工程产品里还承担版本管理、参数保存和在线升级等任务。
8.3 SRAM:程序运行时的工作台
SRAM 是运行时内存,掉电后内容会丢失。
程序运行时,以下内容通常会放在 SRAM 中:
- 全局变量。
- 静态变量。
- 局部变量。
- 函数调用栈。
- 通信接收缓冲区。
- 图像、音频、传感器数据缓存。
如果 Flash 是仓库,SRAM 就是工作台。仓库里放的是长期保存的说明书和材料,工作台上放的是正在加工的数据。
初学者常见的一个问题是:代码明明编译通过,但一运行就异常,可能就是 SRAM 不够或者栈溢出。
例如下面这种写法在电脑上问题不大,但在单片机上就要谨慎:
void test(void)
{
uint8_t big_buffer[100 * 1024];
}如果你的 MCU 只有几十 KB SRAM,这样一个局部数组就可能直接把栈撑爆。
TIP
单片机开发要养成资源意识。每申请一个数组、每开一个任务栈、每加一个通信缓存,都要知道它大概占多少 RAM。
8.3.1 栈、堆、全局变量到底放在哪里?
很多 C 语言教程会讲栈、堆、全局变量,但如果不结合单片机内存,很容易停留在概念层面。
在单片机工程中,一个典型程序大致会被分成下面几类区域:
| 区域 | 常见位置 | 保存什么 | 特点 |
|---|---|---|---|
.text | Flash | 机器指令、只读常量 | 掉电不丢失 |
.rodata | Flash | 字符串常量、只读表格 | 不应在运行时修改 |
.data | Flash + SRAM | 有初值的全局变量/静态变量 | 上电时从 Flash 拷贝到 SRAM |
.bss | SRAM | 初值为 0 的全局变量/静态变量 | 上电时清零 |
| 栈 Stack | SRAM | 局部变量、函数调用现场、中断现场 | 通常从高地址向低地址增长 |
| 堆 Heap | SRAM | malloc 动态分配的内存 | 裸机项目中应谨慎使用 |
比如:
const uint8_t logo_data[] = {1, 2, 3}; // 通常放在 Flash
uint32_t boot_count = 1; // 有初值,属于 .data
uint8_t rx_buffer[256]; // 初值为 0,属于 .bss
void func(void)
{
uint8_t temp[32]; // 局部数组,通常在栈上
}这里有一个容易忽略的点:.data 变量虽然运行时在 SRAM 中,但它的初始值也要占用一份 Flash。因为上电后启动代码要知道应该把什么初值拷贝到 SRAM。
8.3.2 为什么单片机项目不建议随便 malloc?
在 PC 程序里,malloc 很常见。但在资源较小的单片机裸机工程中,动态内存要谨慎使用。
原因主要有三点:
- 内存总量小,分配失败的概率更高。
- 长时间反复申请和释放,可能造成内存碎片。
- 分配失败后如果处理不严谨,系统可能出现难以定位的异常。
这不是说单片机绝对不能用动态内存,而是要有边界。很多工程会采用以下策略:
- 初始化阶段一次性分配,运行中不再释放。
- 使用固定大小的内存池。
- 协议栈或 RTOS 内部使用动态内存,但业务层减少随意申请。
- 对所有申请结果做判空处理。
对于初学者,本教程前期会尽量使用静态数组和固定缓冲区,让内存占用更可控。
8.4 外设:连接真实世界的功能模块
单片机之所以适合控制设备,靠的不是 CPU 单打独斗,而是片上外设。
常见外设如下:
| 外设 | 作用 | 典型应用 |
|---|---|---|
| GPIO | 输入/输出高低电平 | LED、按键、片选、使能 |
| EXTI | 外部中断 | 按键唤醒、编码器、限位开关 |
| TIM | 定时器 | 延时、PWM、电机控制、输入捕获 |
| USART/UART | 串口通信 | 调试日志、模块通信、串口屏 |
| SPI | 高速同步通信 | Flash、屏幕、IMU、ADC 芯片 |
| I2C | 两线低速总线 | 温湿度、EEPROM、RTC、IO 扩展 |
| ADC | 模拟量转数字量 | 电压采样、电位器、传感器 |
| DAC | 数字量转模拟量 | 波形输出、音频、基准电压 |
| CAN | 工业和车辆总线 | 电机控制器、BMS、车载通信 |
| USB | 通用串行总线 | 虚拟串口、U 盘、HID 设备 |
| ETH | 以太网 | 网络通信、网关、远程控制 |
| DMA | 直接内存访问 | 高速搬运数据,减轻 CPU 负担 |
这些外设不是 软件模拟出来的功能 ,而是芯片内部真实存在的硬件电路。我们写代码只是配置它们、启动它们、读取它们的状态。
8.5 总线:芯片内部的数据高速路
CPU、Flash、SRAM 和外设之间需要互相传数据,这就需要总线。
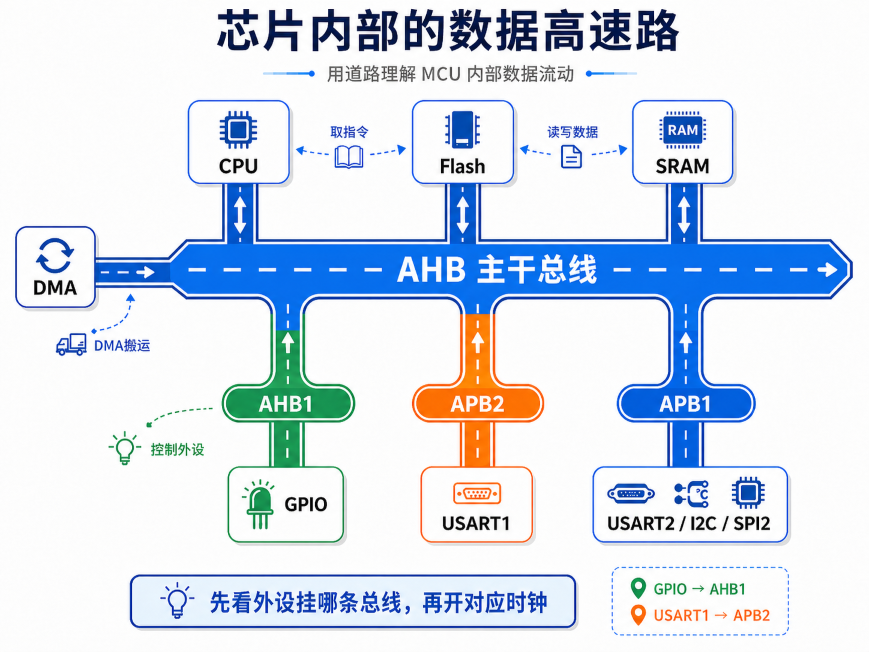
上图由AI生成
可以把总线理解成芯片内部的道路系统:
- CPU 要取指令,需要通过总线访问 Flash。
- CPU 要读写变量,需要通过总线访问 SRAM。
- CPU 要控制 GPIO,需要通过总线访问 GPIO 寄存器。
- DMA 要搬运串口数据,也需要通过总线访问外设和内存。
STM32F4 内部有 AHB、APB1、APB2 等不同层级的总线。后续大家会经常看到这些名字,比如:
- GPIO 挂在 AHB1 总线上。
- USART1 挂在 APB2 总线上。
- USART2、I2C、SPI2 等挂在 APB1 总线上。
为什么要知道这些?
因为开启外设时钟时,你必须知道它属于哪条总线。例如 GPIOA 要开启 AHB1 时钟,USART1 要开启 APB2 时钟。否则你配置了半天寄存器,外设仍然不会工作。
8.6 时钟:所有硬件工作的节拍
单片机内部的数字电路不是随便乱跑的,它们要跟着时钟节拍工作。
时钟可以理解成工厂里的统一节拍器。节拍到了,寄存器更新一次,状态机前进一步,计数器加一次。
对单片机来说,时钟决定了很多事情:
- CPU 每秒能执行多少指令。
- 定时器计数速度。
- 串口波特率是否准确。
- SPI、I2C、ADC 等外设工作频率。
- 系统功耗。
天空星 STM32F407 核心板上有高速外部晶振,配合芯片内部 PLL,可以把系统主频配置到 168MHz。后续第 6 章会专门讲 STM32F407 的时钟系统。
IMPORTANT
单片机里很多外设上电后默认关闭时钟,这是为了省电。后续你写任何外设驱动时,都要先问自己一句:这个外设的时钟开了吗?
8.7 复位和启动:程序从哪里开始跑
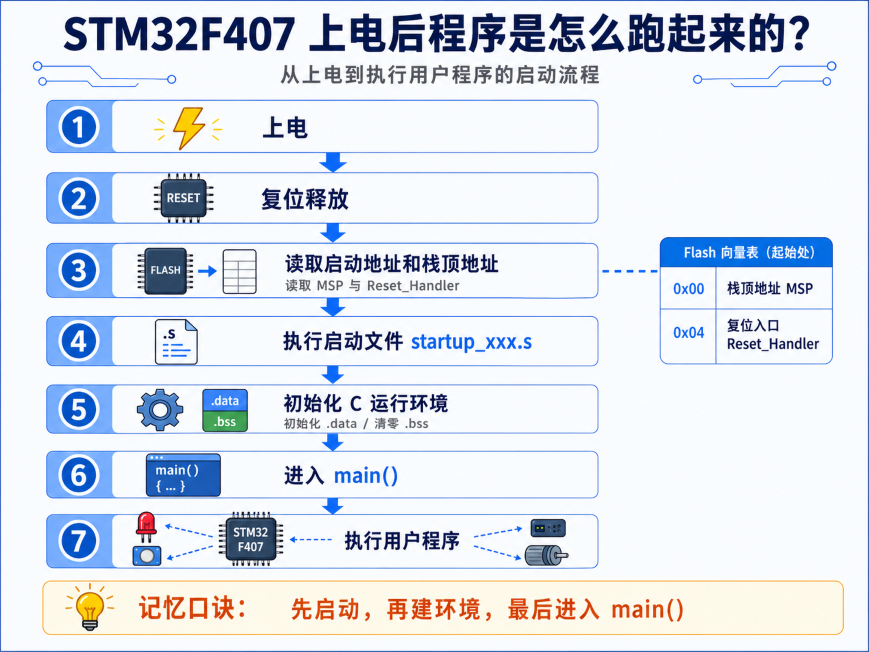
单片机上电后并不是从 main() 函数直接开始运行。
更准确的流程是:
- 电源上升到安全范围(可以启动单片机的电压)。
- 复位电路释放复位信号。
- CPU 从固定启动地址读取向量表。
- 设置主栈指针。
- 跳转到复位处理函数。
- 初始化数据段、清零 BSS 段、配置系统时钟。
- 调用
main()。
用简化流程表示:
上图由AI生成
所以 main() 不是世界的起点,它只是 C 程序员看到的入口。真正的启动过程比它更早。
这个概念对实际工作很重要。比如你做 Bootloader、在线升级、异常定位、HardFault 分析、低功耗唤醒时,迟早会接触启动文件、向量表和链接脚本。
8.7.1 向量表是什么?
向量表可以理解成一张 入口地址表 。CPU 复位后,会先到固定位置读取这张表。
在 Cortex-M 系列 MCU 中,向量表最前面通常是:
| 位置 | 内容 | 作用 |
|---|---|---|
| 第 0 项 | 初始主栈指针 MSP | 告诉 CPU 栈顶在哪里 |
| 第 1 项 | Reset_Handler 地址 | 告诉 CPU 复位后从哪里执行 |
| 后续项 | NMI、HardFault、外设中断入口 | 告诉 CPU 中断发生后跳到哪里 |
也就是说,单片机复位后不是 搜索 main 函数 ,而是按硬件规则读取向量表,然后跳转到复位入口。Reset_Handler 执行完一系列初始化后,才会调用 C 语言的 main()。
这也是为什么启动文件 startup_stm32f4xx.s 很重要。它里面定义了向量表和很多默认中断处理函数。如果某个中断发生了,但你没有写对应处理函数,程序可能会进入默认死循环。
8.7.2 复位不等于断电重来
初学者容易把复位理解成 重新上电 。实际工程中,复位有很多来源:
| 复位来源 | 说明 |
|---|---|
| 上电复位 POR | 电源从无到有,芯片自动复位 |
| 掉电复位 BOR | 电压低于安全阈值,防止低压程序乱跑造成设备混乱 |
| 外部复位 NRST | 复位脚被拉低,比如按下复位键 |
| 软件复位 | 程序主动触发系统复位 |
| 看门狗复位 | 程序未及时喂狗,被看门狗复位 |
| 低功耗唤醒复位/恢复 | 从某些低功耗模式恢复运行 |
为什么工程师关心复位原因?
因为它能帮助定位现场问题。比如设备偶尔重启,如果复位标志显示是看门狗复位,那重点就要查程序是否卡死;如果是 BOR 复位,就要重点查电源跌落、浪涌、电机启动导致的压降。
TIP
成熟产品通常会在启动时读取并记录复位原因。这样售后或现场调试时,不至于只知道 设备重启了 ,却不知道是电源、软件还是看门狗触发的。
8.8 最小系统:让单片机能跑起来的硬件条件
单片机不是把芯片焊到 PCB 上就能稳定运行。要让它正常工作,至少需要一个最小系统。我们的天空星核心板也会算是最小系统开发板。
以 STM32F407 为例,最小系统通常包括:
| 模块 | 作用 | 工程注意点 |
|---|---|---|
| 电源 | 给芯片提供稳定电压 | VDD/VDDA/VBAT/VCAP 不要漏接,去耦电容要靠近芯片,走线时要先进过去耦电容再到芯片管脚。 |
| 复位 | 保证上电时从确定状态启动 | NRST 电路要可靠,避免慢上电误动作 |
| 时钟 | 给 CPU 和外设提供节拍 | 内部 RC 可用,外部晶振精度更高 |
| 启动配置 | 决定从用户 Flash 还是系统 Bootloader 启动 | BOOT0 正常运行应保持确定电平 |
| 下载调试接口 | 用于烧录和在线调试 | SWDIO、SWCLK、GND 至少要引出 |
| 必要外设连接 | 根据项目连接 LED、按键、传感器等 | 注意电平、电流、复用冲突 |
可以把最小系统理解成【 能让 MCU 清醒、稳定、有节奏地运行起来的基础设施 】。
天空星核心板已经帮大家把这些基础部分做好了,所以初学者可以先专注软件和外设。但如果以后自己画板,这些内容一个都不能省。
8.8.1 去耦电容为什么必须靠近电源脚?
单片机内部数字电路在高速翻转时,会瞬间从电源吸取电流。电源线和 PCB 走线都有电感,如果没有就近的小电容提供瞬态电流,芯片电源脚上的电压就可能抖动。
去耦电容的作用可以理解成 MCU 电源脚旁边的小水桶:
- 大电源负责长期供水。
- 小电容负责瞬间补水。
- 水桶离用水点越近,补水越及时。
所以数据手册和硬件设计指南都会强调:每个 VDD 附近放置 100nF 去耦电容,且尽量靠近芯片引脚。对于 STM32F4,VCAP 引脚还必须按手册要求接电容,因为它关系到内部 1.2V 稳压器稳定性。
CAUTION
VCAP 电容不是普通可选滤波电容,接错、漏接或容值不合适,都可能导致 STM32F4 无法启动或运行不稳定。我们天空星STM32F4核心板VCAP电容用的 X7R 材质的 2.2uF 电容。
8.9 调试接口:工程师和芯片对话的通道
很多初学者只把下载器当成 烧程序的工具 ,这太浪费了。
SWD(Serial Wire Debug)接口至少能做这些事情:
- 下载程序到 Flash。
- 单步执行代码。
- 设置断点。
- 查看变量。
- 查看寄存器。
- 暂停 CPU。
- 观察调用栈。
- 读取 Flash 和 SRAM 内容。
对于 STM32 来说,常见 SWD 信号包括:
| 信号 | 作用 |
|---|---|
| SWDIO | 调试数据线,双向传输 |
| SWCLK | 调试时钟线 |
| GND | 共地,必须连接 |
| 3.3V/VREF | 给下载器识别目标板电平,有些下载器需要 |
| NRST | 可选,用于下载器控制目标复位 |
IMPORTANT
做产品板时,除非空间极度紧张,否则建议保留 SWD 测试点或接口。没有调试口的板子,一旦现场出问题,定位难度会成倍增加。再省也千万不要省这个,否则后续维护就是灾难。
8.10 轮询、中断和 DMA:CPU 如何和外设配合
单片机不是所有事情都靠 CPU 死等完成。CPU 和外设配合,常见有三种方式:轮询、中断、DMA。
8.10.1 轮询:我一直问你准备好了吗?
轮询(Polling)就是 CPU 不断检查某个状态位:
while (uart_tx_busy())
{
// 等待串口发送完成
}它的优点是简单直接,初学者容易理解。缺点也明显:CPU 在等待期间什么也干不了。
轮询适合:
- 初始化阶段等待硬件稳定。
- 很短时间的状态等待。
- 简单实验和低速任务。
不适合:
- 长时间等待。
- 多任务并行。
- 高速通信接收。
- 对实时性要求高的系统。
8.10.2 中断:有事再叫我
中断(Interrupt)更像电话铃。CPU 正在执行主程序,外设事件发生后主动通知 CPU,CPU 暂停当前工作,先去处理中断。
比如串口收到一个字节:
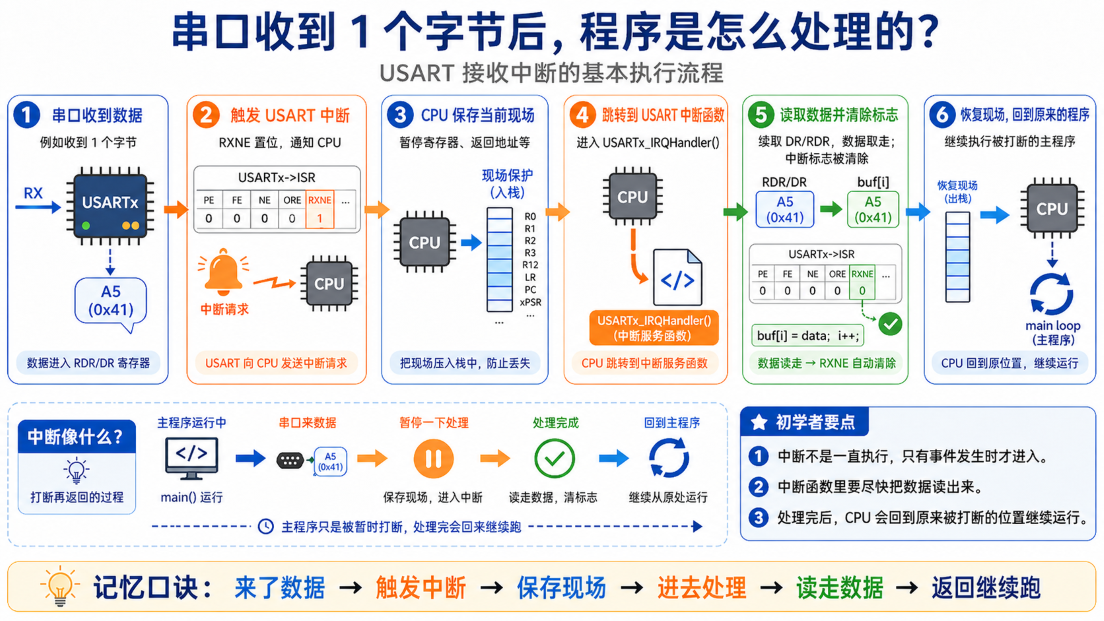
上图由AI生成
中断适合:
- 按键、限位开关等外部事件。
- 串口、CAN 等通信接收。
- 定时周期任务。
- 编码器计数。
- 故障保护和快速响应。
但中断不是越多越好。中断过多、优先级混乱、中断函数太长,都会让系统变得不可预测。
IMPORTANT
中断函数里要短、快、确定。一般只做读状态、清标志、存数据、置标志位,把复杂处理留给主循环或任务。
8.10.3 DMA:让搬运工自己搬数据
DMA(Direct Memory Access,直接内存访问)可以在不经过 CPU 逐字节搬运的情况下,把数据从外设搬到内存,或从内存搬到外设。
比如 SPI 读取一大段 Flash 数据,如果 CPU 一个字节一个字节读,会占用大量时间。使用 DMA 后,可以让 DMA 控制器自动搬运,CPU 去处理别的事情,搬完后再通过中断通知 CPU。
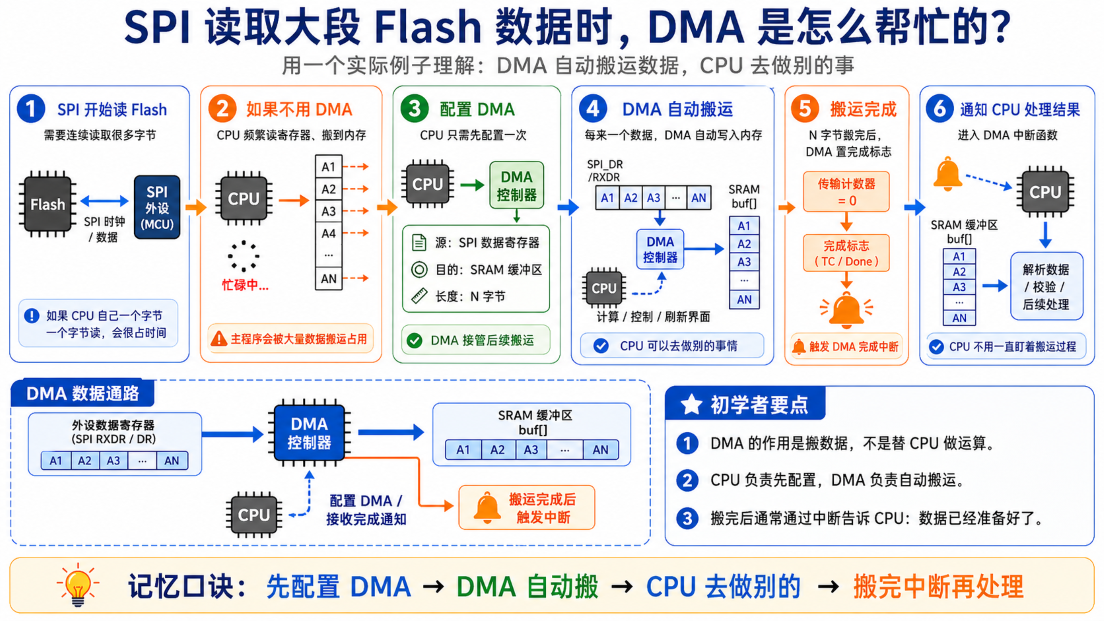
上图由AI生成
DMA 常用于:
- UART 大量接收。
- SPI 屏幕刷图。
- ADC 连续采样。
- I2S 音频数据流。
- 存储器到存储器搬运。
它的价值不是 让代码看起来高级 ,而是把 CPU 从重复搬运数据的工作里解放出来,让系统有余量处理控制逻辑。但是假如你只让DMA搬一两个字节的话,那速度也提不起来,反而会浪费系统性能,因为配置 DMA 控制器本身也是需要消耗 CPU 时钟周期的(需要设置寄存器、清除标志位、开启中断等)。只有当【搬运的数据量足够大】时,DMA 节省下来的 CPU 时间才足以抵消配置它所带来的开销。
8.10.4 三种方式怎么选?
| 方式 | 优点 | 缺点 | 适合场景 |
|---|---|---|---|
| 轮询 | 简单、流程直观 | 浪费 CPU,容易阻塞 | 简单实验、短等待 |
| 中断 | 响应快,不用一直等 | 设计不好会影响实时性 | 事件响应、定时任务、通信接收 |
| DMA | 适合大量数据搬运,CPU 占用低 | 配置复杂,调试难度更高 | 高速通信、ADC、屏幕、音频 |
学习路线建议是:先会轮询,理解外设状态;再学中断,理解异步事件;最后学 DMA,解决效率和吞吐量问题。
具体的我们以后的章节再介绍吧。
九 程序是怎么控制硬件的?
9.1 从 C 代码到机器指令
我们写的 C 语言代码,单片机并不能直接理解。它需要经过工具链处理:
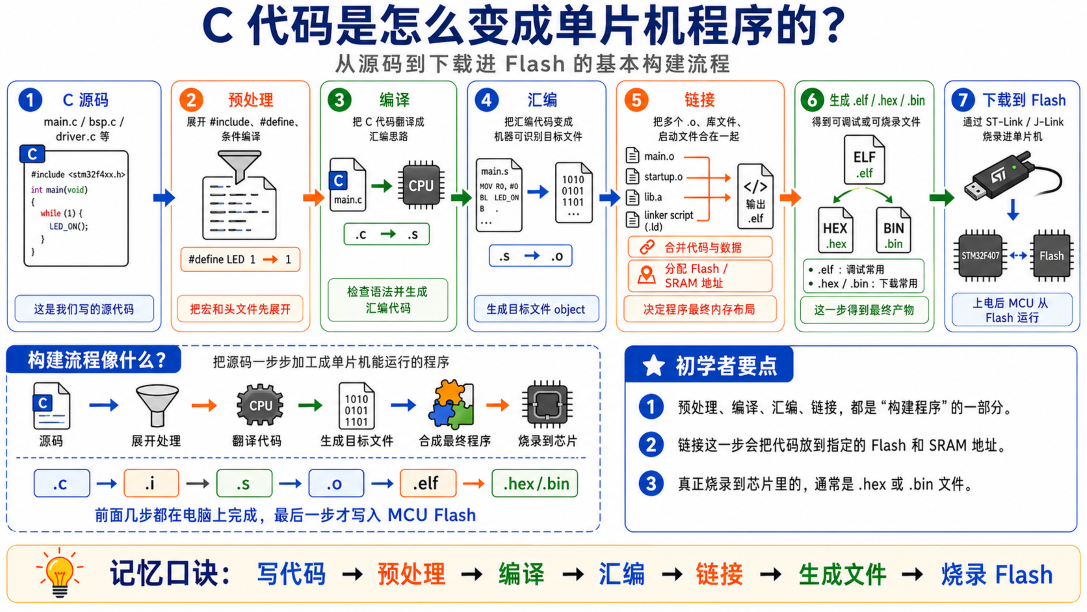
上图由AI生成
常见文件含义:
| 文件 | 作用 |
|---|---|
.c / .h | C 源码和头文件 |
.s | 汇编文件,常见于启动文件 |
.o | 编译后的目标文件 |
.elf | 带符号信息的可执行文件,适合调试 |
.hex | Intel HEX 格式,常用于烧录 |
.bin | 纯二进制镜像,常用于 Bootloader 或量产烧录 |
.map | 链接映射文件,可查看函数和变量占用空间 |
初学者平时可能只关注 编译成功 和 下载成功,但工程师会经常看 .map 文件,因为它能回答很多关键问题:
- Flash 还剩多少。
- SRAM 还剩多少。
- 哪个库或数组占空间最大。
- 某个函数被链接到了哪里。
- 中断向量表放在哪个地址。
9.2 寄存器:代码控制硬件的入口
单片机控制硬件,本质上是通过读写寄存器完成的。
寄存器可以理解成硬件模块的控制面板。比如一个 GPIO 引脚要输出高电平,大致需要配置:
- 这个 GPIO 端口的时钟使能。
- 引脚模式是输入还是输出。
- 输出类型是推挽还是开漏。
- 输出速度是多少。
- 是否上拉或下拉。
- 输出数据寄存器写 1 还是写 0。
每一项配置最终都会落到某些寄存器的某些位上。
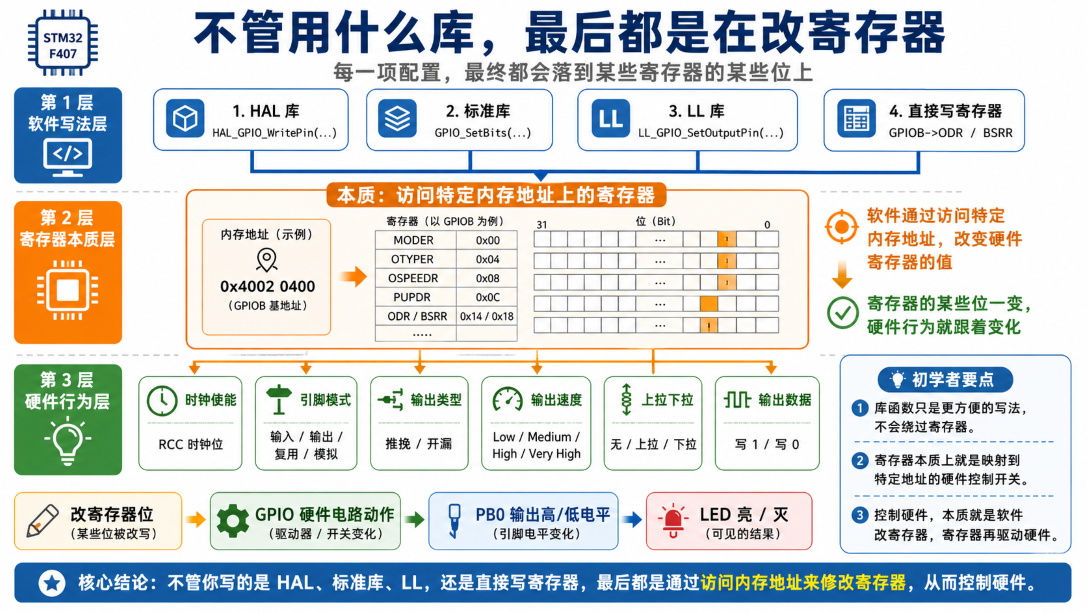
上图由AI生成
所以,无论你使用 HAL 库、标准库、LL 库,还是直接写寄存器,最后都绕不开一件事:
软件通过访问特定内存地址,改变硬件寄存器的值,从而控制硬件行为。
9.3 什么是 内存映射外设 ?
STM32 这类 Cortex-M 单片机采用内存映射外设机制。
意思是:外设寄存器被映射到 CPU 的地址空间里。CPU 访问某个地址时,如果这个地址属于 SRAM,那就是读写内存;如果这个地址属于 GPIO、USART、TIM 等外设,那就是读写外设寄存器。
例如下面只是概念示意:
0x08000000 Flash 程序区
0x20000000 SRAM 数据区
0x40000000 外设寄存器区这也是为什么 C 语言可以用指针操作寄存器:
#define REG32(addr) (*(volatile unsigned int *)(addr))这里的 volatile 很重要,它告诉编译器:这个地址的值可能被硬件随时改变,不能随便优化掉读写操作。
TIP
初学者可以先使用 HAL 库,不必一开始就硬啃寄存器。但一定要知道 HAL 库不是魔法,它只是把寄存器操作封装成了更容易使用的函数。
9.4 用点亮 LED 串起整个控制链路
点灯是单片机学习里最经典的第一个实验。它看起来很简单,但如果你能把点灯背后的完整链路讲清楚,后面学其他外设会轻松很多。
假设我们要让某个 GPIO 引脚输出高电平,点亮一个 LED。完整链路可以拆成下面几层:
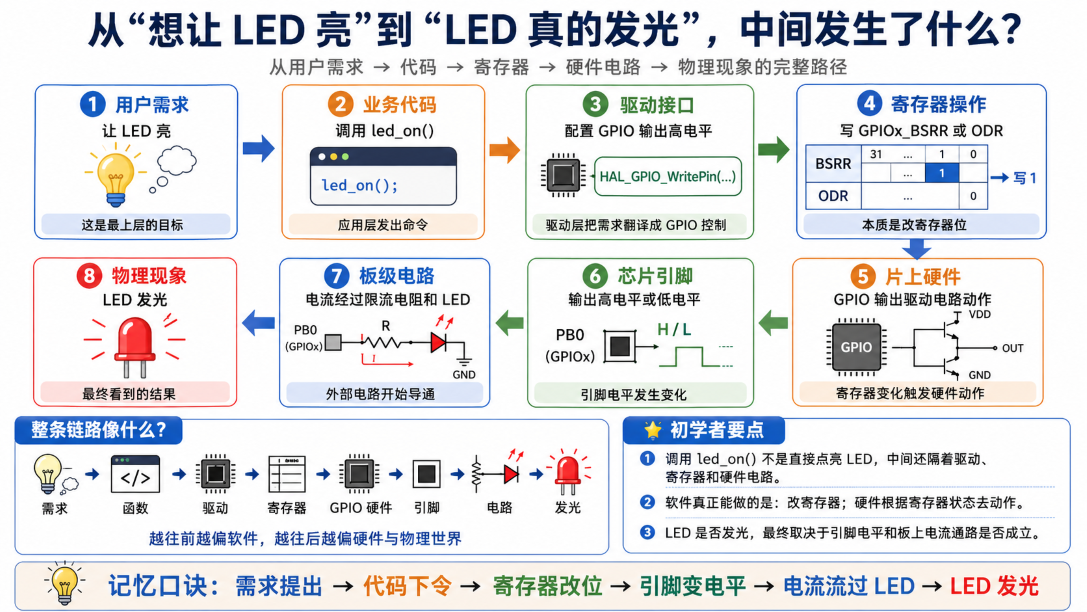
上图由AI生成
这里每一层都可能出问题:
| 层次 | 可能问题 | 排查方向 |
|---|---|---|
| 业务代码 | 根本没调用 led_on() | 打断点、加日志、看流程 |
| 驱动初始化 | GPIO 没初始化成输出 | 检查初始化函数是否执行 |
| 外设时钟 | GPIO 端口时钟没开 | 检查 RCC 时钟使能 |
| 寄存器写入 | 写错端口或引脚 | 对照原理图和引脚表 |
| 引脚复用 | 引脚被别的外设占用 | 查复用配置和冲突资源 |
| 板级电路 | LED 接法和电平逻辑相反 | 看原理图,是高电平亮还是低电平亮 |
| 电气参数 | 电流太小或 LED 极性错误 | 万用表测电压,检查限流电阻 |
9.4.1 高电平亮和低电平亮不是一回事
很多初学者写代码时默认认为 输出 1 就亮,输出 0 就灭 。但实际要看板级电路怎么接。
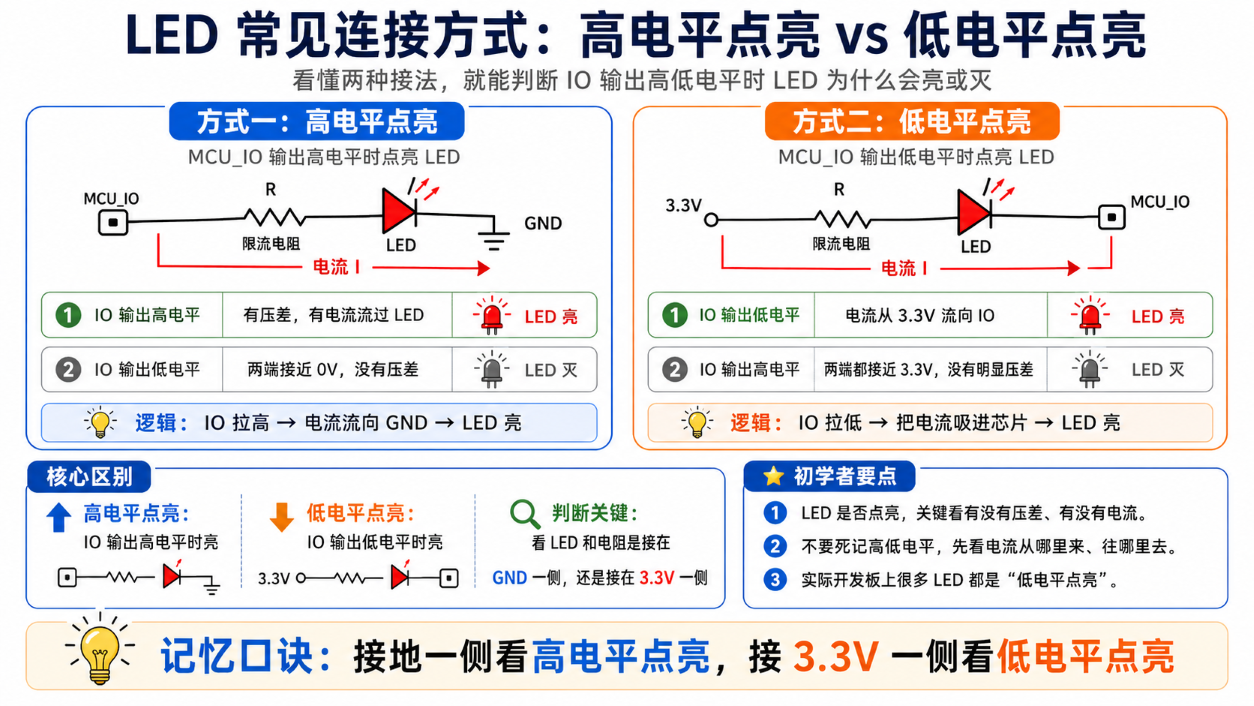
上图由AI生成
比如说天空星核心板上的绿色LED灯是高电平点亮的(PB2),但是筑基学习板上面的那个能被控制的PWM呼吸灯就需要低电平来点亮(PB8)。详情可以看着这里的内容:【9】新建点灯工程【寄存器版本】 | 立创开发板技术文档中心
这就是为什么工程里常会看到 LED_ON 不一定等于 GPIO_PIN_SET。一个写得更稳的驱动,会把硬件电平逻辑封装起来:
#define LED_ON_LEVEL GPIO_PIN_RESET
#define LED_OFF_LEVEL GPIO_PIN_SET
void led_on(void)
{
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, LED_ON_LEVEL);
}
void led_off(void)
{
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, LED_OFF_LEVEL);
}业务层只关心 led_on() 和 led_off(),不用关心这颗 LED 到底是高电平亮还是低电平亮。以后硬件换了接法,只需要改驱动层定义。
9.4.2 为什么点灯前要先开 GPIO 时钟?
STM32 为了降低功耗,上电后大部分外设时钟默认关闭。GPIO 也是外设,所以要先开启对应 GPIO 端口的时钟。
如果时钟没开,后面配置 GPIO 模式、输出电平,很可能都不会按预期生效。
这件事对初学者很关键:STM32 不是你一写 GPIO 寄存器,引脚就一定有反应。外设时钟、引脚模式、输出类型、上下拉、复用功能都要配置对。
9.4.3 为什么不能只看代码,不看原理图?
同样是 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET),它到底做了什么,取决于 PB0 在硬件上接了什么。
PB0 可能接:
- LED。
- 蜂鸣器驱动。
- MOSFET 栅极。
- 外部芯片片选。
- 电机驱动使能。
- 什么都没接,只是排针引出。
如果你不知道 PB0 接了什么,就不知道输出高电平会带来什么后果。工程上写 GPIO 代码前,一定要先看原理图和引脚分配表。
对于天空星筑基学习板,尤其要注意两类信息:
- 这个引脚是不是通过拨码开关或模拟开关接到了不同功能。
- 这个引脚是否和其他外设复用,当前实验是否会冲突。
IMPORTANT
软件工程师也必须会看原理图。至少要能看懂 MCU 引脚接到了哪个外设、中间有没有电阻/三极管/MOS/电平转换、默认电平是什么。
9.4.4 从点灯看 HAL、LL、寄存器的差异
同样是控制一个引脚,不同层次的代码风格可能完全不同。
HAL 风格一般是:
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);优点是可读性好、跨型号迁移相对容易、资料多。缺点是函数调用层次较多,对极致性能和代码体积不一定最优。
寄存器风格可能类似:
GPIOB->BSRR = GPIO_BSRR_BS0;优点是直接、效率高、时序可控。缺点是需要对寄存器非常熟悉,可读性和移植性更依赖工程师水平。
工程实践里不必争论 到底哪种一定最好 。更成熟的判断是:
- 教学和快速验证:HAL 很合适。
- 对时序敏感的关键路径:可以局部使用 LL 或寄存器。
- 需要长期维护的项目:封装好驱动接口,业务层不要直接散落寄存器操作。
- 性能优化前先测量,不要凭感觉把所有 HAL 都替换掉。
9.5 裸机程序、HAL 库和 RTOS 的关系
单片机软件常见有几种层次:
| 层次 | 特点 | 适合阶段 |
|---|---|---|
| 直接寄存器 | 最贴近硬件,效率高,但代码量大 | 理解底层原理、特殊优化 |
| LL 库 | 比寄存器易用,比 HAL 更轻量 | 对性能和可控性有要求 |
| HAL 库 | 易上手,生态资料多,移植方便 | 初学、快速验证、常规项目 |
| RTOS | 多任务调度、队列、信号量、定时器 | 复杂项目、通信和控制并行 |
这几者不是互相敌对的关系。
优秀的工程师应该知道每一层解决什么问题:
- 用 HAL 快速搭建工程。
- 遇到性能瓶颈时看 HAL 底层做了什么。
- 需要精细控制时用 LL 或寄存器。
- 业务复杂时引入 RTOS 管理任务。
- 对关键路径做测量,而不是凭感觉优化。
9.5.1 裸机程序不等于低级,RTOS 也不等于高级
很多初学者会把技术栈按 档次 理解:寄存器低级,HAL 中级,RTOS 高级。这个理解不准确。
裸机程序如果结构清晰、状态机严谨、时序明确、异常处理完整,一样可以做出非常稳定的产品。
RTOS 如果任务划分混乱、优先级乱设、共享资源不加保护,也会做出一堆偶发死锁和时序问题。
是否使用 RTOS,主要看项目复杂度:
| 项目特征 | 裸机更合适 | RTOS 更合适 |
|---|---|---|
| 功能数量 | 少,流程简单 | 多,任务并行明显 |
| 实时任务 | 少量定时任务 | 多个周期不同的任务 |
| 通信协议 | 简单收发 | 多路通信、协议栈、队列 |
| UI 交互 | 简单按键 LED | 屏幕、菜单、触摸、动画 |
| 团队维护 | 小项目,一个人维护 | 模块多,多人协作 |
本教程前期会以裸机和 HAL 为主,因为这样更容易看清外设本身。等大家理解了 GPIO、定时器、串口、DMA 这些基础,再引入 RTOS 才不会变成 任务会跑,但不知道底层为什么工作 。
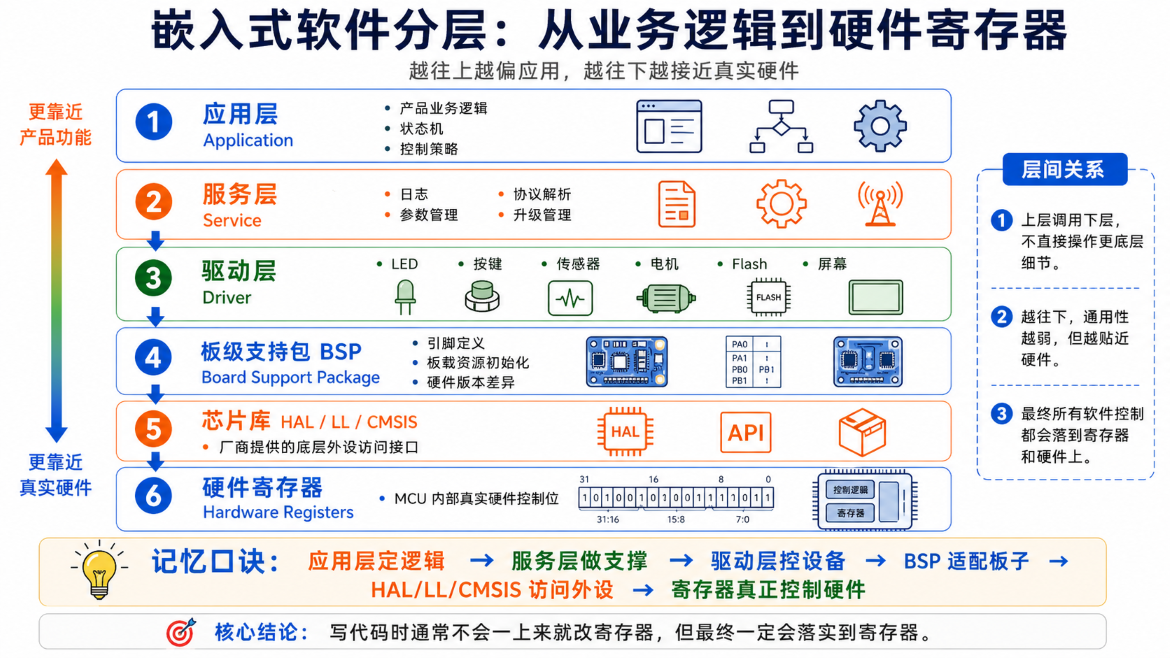
9.5.2 一个工程常见的软件分层
比较健康的单片机工程,通常不会把所有代码都写在 main.c 里。可以参考下面这种分层:
上图由AI生成
初学阶段工程小,把代码写在一个文件里能跑起来没问题。但一旦项目变大,分层就很重要。它能让你换一颗 LED、换一个传感器、换一个芯片型号时,不至于牵一发而动全身,越大的项目越是要这样做。
十 单片机项目关注的核心问题
10.1 实时性:不是快就够,而是要准时
单片机项目经常和实时控制有关。
所谓实时性,不是单纯说 CPU 主频高,而是说系统必须在规定时间内完成响应。
举几个例子:
- 电机 PWM 更新晚了,可能出现抖动或噪声。
- 编码器脉冲漏计数,速度和位置就会错误。
- 串口接收处理太慢,数据可能溢出。
- 电源过压保护响应太慢,硬件可能直接损坏,冒出来魔法烟雾。
- 按键扫描慢一点问题不大,因为人手动作本来就慢。
不同任务对实时性的要求不同:
| 任务 | 典型时间尺度 | 处理方式 |
|---|---|---|
| 电源保护、急停 | us 到 ms | 中断、硬件保护优先 |
| 电机控制环 | 几十 us 到几 ms | 定时器中断、DMA、专用外设 |
| 串口/CAN 接收 | us 到 ms | 中断或 DMA |
| 按键扫描 | 10ms 到 50ms | 定时扫描即可 |
| UI 刷新 | 20ms 到 100ms | 主循环或任务调度 |
| 参数保存 | 秒级 | 后台处理,注意掉电保护 |
工程上要分清哪些任务必须准时,哪些任务可以慢慢来。把所有事情都塞进一个大循环里,项目小的时候能跑,项目一复杂就容易出问题。
10.2 可靠性:产品不是演示板
开发板实验的目标是 看到现象 ,产品开发的目标是 长期可靠稳定运行 。
这两者差距很大。
一个工程产品至少要考虑:
- 电源上电是否平稳。
- 复位电路是否可靠。
- 外部接口是否有 ESD、过压、反接保护。
- 程序跑飞后能否恢复。
- 通信异常后能否重连。
- 传感器数据异常时是否有保护逻辑。
- Flash 写参数时突然掉电怎么办。
- 现场干扰导致误触发怎么办。
- 温度、电压、负载变化后是否仍然稳定。
单片机项目里常用的可靠性手段包括:
- 看门狗(Watchdog):程序卡死后自动复位。
- CRC 校验:确认数据或固件没有损坏。
- 超时机制:避免等待某个外设时卡死。
- 状态机:让业务流程清晰可控。
- 参数双备份:防止掉电写入导致配置损坏。
- 边界检查:防止数组越界、空指针、异常输入。
- 硬件保护:保险丝、TVS、限流电阻、隔离、滤波。
IMPORTANT
工程师写单片机程序时,不能只写 正常情况怎么跑 ,还要写 异常情况怎么退、怎么报错、怎么恢复 。
10.3 资源受限:每一份资源都要有预算
在电脑上写程序时,很多人不太关心内存和存储空间。但在单片机上,资源非常具体:
- Flash 可能只有 64KB、256KB、512KB。
- SRAM 可能只有 20KB、64KB、192KB。
- UART、SPI、I2C 数量有限。
- 定时器通道有限。
- DMA 通道有限。
- GPIO 引脚有限。
- CPU 时间有限。
- 电源电流也有限。
做项目时,工程师会很早就会做资源表。例如:
| 资源 | 分配给谁 | 备注 |
|---|---|---|
| USART1 | 调试日志 | 下载调试口 |
| I2C1 | RTC、温湿度、IO 扩展 | 多设备共总线,地址不能冲突 |
| SPI2 | Flash、IMU | 片选分开,注意总线速度 |
| TIM1_CH1 | 电机 PWM | 高级定时器,适合电机控制 |
| ADC1_INx | 电压采样 | 输入不能超过参考电压 |
| DMA2_Streamx | 串口接收 | 注意和其他外设冲突 |
天空星筑基学习板之所以要做引脚分配表和拨码开关冲突管理,就是因为真实项目中的 MCU 引脚永远不够用(毕竟一旦涉及到批量,你在MCU上省的一块钱,批量10W套的话那可就是10W块钱了)。资源规划是工程能力的一部分。
10.4 电气边界:程序不能违反硬件规律
单片机软件工程师必须懂一点硬件。
因为你的代码最终会变成引脚上的电压、电流和波形。如果你不了解硬件边界,代码写得再漂亮也可能烧板子。
常见边界包括:
- GPIO 不能直接驱动大电流负载。
- 3.3V 单片机不能随便接 5V 信号。
- ADC 输入不能超过参考电压。
- 电机、继电器等感性负载要考虑反向电动势。
- 长线通信要考虑阻抗、终端电阻、共模干扰。
- 高速信号要考虑走线长度、地回流、串扰和边沿速率。
- 电源纹波和地弹会影响 ADC、通信和复位稳定性。
CAUTION
单片机的 GPIO 是逻辑控制脚,不是电源输出口。不要用 GPIO 直接驱动电机、继电器、大功率 LED、喇叭等负载,必须通过三极管、MOSFET、驱动芯片或隔离电路。
10.5 可维护性:让半年后的自己还能看懂
初学者经常觉得程序能跑就行,但工程代码还要考虑维护。
好的单片机工程通常具备这些特点:
- 引脚定义集中管理。
- 外设初始化和业务逻辑分层。
- 驱动模块接口清晰。
- 错误码和日志有统一规范。
- 魔法数字少,关键参数有命名。
- 状态机流程明确。
- 中断里只做必要工作,复杂处理放到主循环或任务。
- 重要时序和硬件限制写在注释或文档里。
例如,不推荐在业务代码里到处写:
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET);更推荐先定义清楚这个引脚是什么:
#define MOTOR_EN_GPIO_PORT GPIOB
#define MOTOR_EN_GPIO_PIN GPIO_PIN_7然后封装成明确的接口:
void motor_enable(void)
{
HAL_GPIO_WritePin(MOTOR_EN_GPIO_PORT, MOTOR_EN_GPIO_PIN, GPIO_PIN_SET);
}这样半年后再看代码,你知道自己是在打开电机使能,而不是在猜 PB7 到底接了什么。
10.6 可调试性:出问题时要能查
工程项目里,最可怕的不是出问题,而是出问题后完全没有线索。
单片机调试通常有几种手段:
| 手段 | 能看到什么 | 适合场景 |
|---|---|---|
| LED 指示 | 程序是否运行到某个状态 | 最早期排查、故障码 |
| 串口日志 | 状态、变量、错误码、流程 | 常规调试和现场问题 |
| SWD 断点 | 程序执行路径、变量值、寄存器 | 开发阶段定位逻辑问题 |
| 示波器 | 电压波形、PWM、时序、毛刺 | 硬件和时序问题 |
| 逻辑分析仪 | 数字通信波形 | UART、SPI、I2C、CAN 时序分析 |
| 万用表 | 电源、电平、连通性 | 上电不工作、焊接排查 |
| Map 文件 | Flash/RAM 占用、符号地址 | 资源分析、链接问题 |
初学者常犯的错误是:程序不工作时只盯着 C 代码看。实际上,单片机问题可能出在很多层:
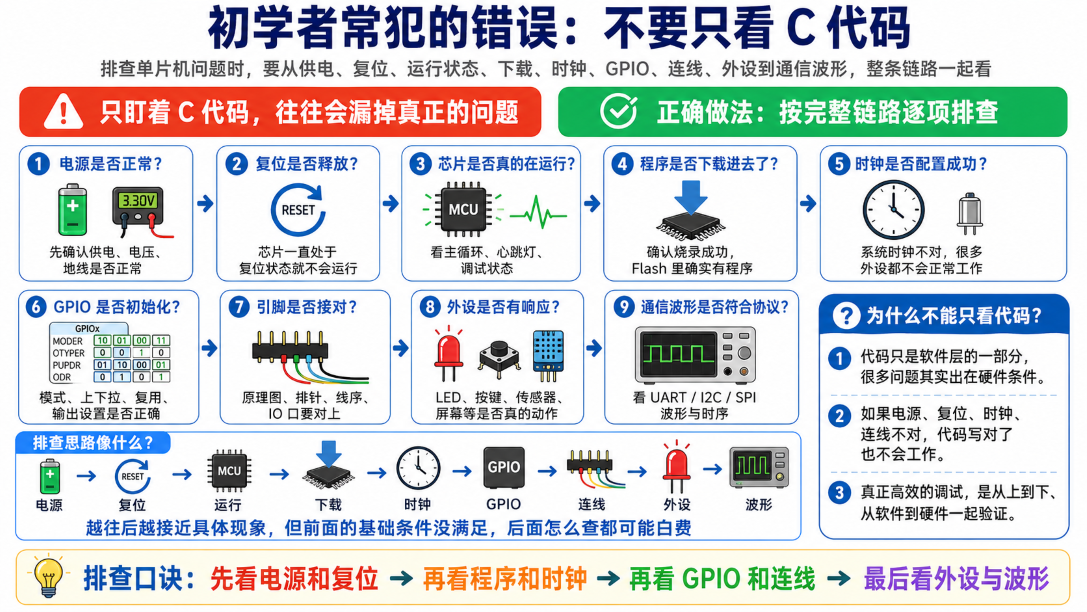
上图由AI生成
推荐大家养成从底层到上层排查的习惯:
- 先测电源:3.3V、5V 是否正常,纹波是否离谱。
- 再看复位:NRST 是否一直被拉低。
- 确认下载:下载器能否识别芯片,Flash 是否写入成功。
- 跑最小程序:只闪一个 LED,确认 CPU 和时钟基本正常。
- 再逐个打开外设:不要一上来就把所有模块都初始化。
- 出现问题时缩小范围:屏蔽无关代码,只保留最小复现。
TIP
真实调试不是 猜哪里错了 ,而是通过测量和实验不断缩小范围。会用万用表、示波器和逻辑分析仪,是嵌入式工程师很重要的基本功。
10.7 从样机到产品,还差哪些东西?
开发板实验跑通,只能说明原理上可行。真正做成产品,还要补很多工程环节。
下面这张表可以当作一个早期检查清单:
| 类别 | 样机阶段常见做法 | 产品阶段需要补足 |
|---|---|---|
| 电源 | 能上电即可 | 过压、反接、浪涌、纹波、热设计 |
| 复位 | 按键复位即可 | 上电时序、低压复位、复位原因记录 |
| 程序 | 正常流程能跑 | 异常分支、超时、错误恢复、看门狗 |
| 通信 | 单包收发正常 | 丢包、粘包、重传、校验、协议版本 |
| 参数 | 写入一次可用 | 掉电保护、双备份、默认值、版本迁移 |
| 生产 | 手动下载 | 量产烧录、序列号、校准、测试工装 |
| 维护 | 开发者现场调试 | 日志、错误码、升级、远程诊断 |
| 安全 | 默认信任输入 | 边界检查、非法命令保护、权限控制 |
举个例子:你在开发板上保存一个参数,可能直接写 Flash 就结束了。但产品里要考虑:
- 写 Flash 时突然断电怎么办?
- 写到一半数据损坏,下一次上电如何识别?
- 参数结构升级后,旧版本参数如何兼容?
- 用户恢复出厂设置时,默认参数从哪里来?
- Flash 擦写寿命是否够?
这就是工程和实验的差别。实验验证的是功能,工程要验证的是完整生命周期。如果大家正在开始做产品的话其实也没必要自己从头做轮子,我之前用过的这个 FlashDB 这个软件包就很好用,甚至简单移植后就可以用在产品中了,非常稳定可靠。
10.8 高级工程师真正关注什么?
一个有经验的工程师看单片机系统,通常会先关注下面这些问题:
- 这个系统最危险的失效模式是什么?会不会造成安全问题?
- 哪些任务有硬实时要求,周期和最坏执行时间是多少?
- 哪些外设共享总线、DMA、中断或引脚资源?
- 电源异常、通信异常、传感器异常时系统怎么处理?
- 参数和固件升级有没有防掉电设计?
- 代码结构是否允许以后换硬件、换芯片、换供应商?
- 现场出了问题,设备能不能留下足够的诊断信息?
- 有没有量产测试方案,能否快速发现焊接和器件问题?
这些问题看起来和 点灯 距离很远,但真正的能力就是这样一层层建立的。今天你在 LED 实验里学会看原理图、查手册、验证电平;以后做电机、以太网、工业总线时,方法是一样的,只是复杂度提高了。
十一 单片机如何选型?
11.1 先看需求,不要先看主频
很多人选单片机时第一眼看主频,觉得越高越好。实际工程里,主频只是其中一个因素。
选型应该先从需求出发:
- 需要多少 GPIO?
- 需要哪些通信接口?几个 UART、SPI、I2C、CAN、USB、以太网?
- 需要多少 ADC 通道?精度和采样速度够不够?
- 需要多少 PWM?定时器通道够不够?
- 程序大概需要多少 Flash?
- 运行数据需要多少 SRAM?
- 是否需要低功耗?
- 工作温度范围是多少?
- 供货是否稳定?
- 软件生态、资料和团队经验是否支持?
- 封装是否容易生产和维修?
- 成本是否满足量产目标?
选型不是 找最强的芯片,而是找最适合这个产品的芯片 。在筑基学习板开发板立项时,为了延续以前的天空星核心板我们采用了核心板+底板的方式;为了让初学者用起来更顺手,我们选择了STM32F4芯片版本的天空星。虽然我们的开发板可能也不算正式的产品,但我们是会以做产品的方式来评估的。
11.2 常见选型维度
| 维度 | 要问的问题 |
|---|---|
| 性能 | 主频、内核、FPU、DSP 能否满足算法和控制周期 |
| 存储 | Flash、SRAM 是否满足当前和后续扩展 |
| 外设 | 通信、ADC、PWM、USB、CAN、ETH 是否够用 |
| 引脚 | 封装引脚数量是否够,复用功能是否冲突 |
| 电气 | IO 电压、驱动能力、ADC 特性是否满足 |
| 功耗 | 运行功耗、待机功耗、唤醒时间是否满足 |
| 生态 | IDE、SDK、例程、社区、调试工具是否成熟 |
| 供应 | 是否容易采购,是否有替代型号 |
| 成本 | 单价、外围器件、PCB 层数、生产难度 |
| 风险 | 新型号资料是否完善,团队是否有经验 |
对于教学和学习来说,我们选择 STM32F407 的原因不是它最新,而是它非常均衡:
- 性能足够强,能覆盖大量实验。
- 外设丰富,适合系统性学习。
- 资料多,遇到问题容易查。
- Cortex-M4 架构有代表性,学会后迁移到其他 MCU 不难。
- 天空星和筑基学习板提供了足够多的真实外设,能接近工程项目。
11.3 用一个小项目演示选型思路
假设我们要做一个小型环境监测控制器,需求如下:
- 读取温湿度传感器。
- 读取一路电压和一路电流。
- 控制一个继电器。
- 控制一个风扇 PWM。
- 通过 RS485 和上位机通信。
- 带一个 OLED 或 LCD 小屏显示状态。
- 需要保存设备地址、报警阈值等参数。
初学者可能会直接问:“用 STM32F103 够不够?用 STM32F407 会不会浪费?”
工程师会先把需求翻译成资源:
| 需求 | 可能需要的 MCU 资源 |
|---|---|
| 温湿度传感器 | I2C 或单总线 |
| 电压/电流采样 | 至少 2 路 ADC |
| 继电器控制 | 1 路 GPIO 输出,最好外接驱动和保护,用光耦进行隔离 |
| 风扇调速 | 1 路定时器 PWM |
| RS485 通信 | 1 路 UART,加收发方向控制 GPIO |
| 屏幕显示 | I2C 或 SPI,取决于屏幕型号 |
| 参数保存 | 内部 Flash 参数区,或外部 EEPROM/Flash |
| 调试日志 | 额外 UART 或 SWO/半主机/RTT 等方式 |
| 后续扩展 | 预留 GPIO、Flash、RAM 和接口余量 |
接下来再看约束:
- 如果只是低速采集和简单显示,F103 这类 MCU 可能就够。
- 如果后续要加以太网、复杂屏幕、多个传感器、文件系统或更复杂算法,F407 会更从容。
- 如果产品要电池供电,可能要重点看低功耗系列,而不是只看主频。
- 如果量产成本极敏感,就要在满足需求的前提下选更小封装和更低成本型号。
这就是选型的基本方法:先列需求,再列资源,再看余量,最后综合成本、供货和团队经验。
NOTE
学习板选型和产品选型的目标不同。学习板应该资源丰富,让大家能学到更多外设;产品板则应该刚好满足需求并留合理余量,不能无意义堆配置。
11.4 初学者选单片机的建议
如果你是刚入门,不建议一开始就追求冷门芯片或极致低价芯片。这也是为什么我们筑基学习板搭配的核心板是STM32F407芯片的原因,而且后续如果想切换国产方案的话,直接更换国产版本的天空星核心板就可以了,这也是我们支持芯片国产化的心。
优先选择:
- 教程多。
- 例程多。
- 调试工具成熟。
- 手册资料完整。
- 社区问题容易搜索。
- 开发板电路设计稳定可靠。
原因很简单:初学阶段最大的成本不是芯片价格,而是卡住之后没人能帮你定位问题。
等你掌握了 GPIO、定时器、串口、I2C、SPI、ADC、中断、DMA、RTOS 这些共性能力后,再换到其他厂家的 MCU,会轻松很多。各位能力上来后,也欢迎把筑基学习板板上的天空星换成GD32版本或者HC32版本的,自行跑跑试试国产芯片。
十二 单片机开发到底在学什么?
12.1 初学者容易走偏的地方
很多人学单片机会经历几个阶段:
- 照着教程点亮 LED。
- 改几个参数看到现象变化。
- 复制例程驱动传感器。
- 多个例程合并后开始报错。
- 一遇到异常就不知道从哪里查。
问题不在于复制例程本身。初学阶段复制例程是正常的。
真正的问题是:只复制现象,没有建立模型。
你应该逐步建立这些模型:
- 电源模型:芯片和外设怎么供电,电压电流是否满足。
- 引脚模型:某个 IO 接到哪里,默认状态是什么,是否复用冲突。
- 时钟模型:CPU 和外设时钟从哪里来,频率是多少。
- 数据模型:数据从传感器到内存,再到算法和输出,怎么流动。
- 时间模型:哪些任务多久执行一次,是否会阻塞。
- 异常模型:通信失败、传感器异常、掉电、复位后怎么办。
当你有了这些模型,调试就不是乱猜,而是一步步缩小范围。
12.2 推荐的学习路线
对于天空星 STM32F407 + 筑基学习板,建议按下面的顺序建立能力:
- 认识开发板资源:知道有哪些外设、供电方式和引脚分配。
- 认识单片机:理解 MCU 的内部结构和运行方式。
- 搭建开发环境:能编译、下载、调试。
- GPIO:点灯、按键、输入输出、电平和驱动能力。
- 中断:外部事件响应,理解异步事件。
- 定时器:延时、PWM、输入捕获、编码器。
- 串口:调试日志、模块通信、协议收发。
- I2C/SPI:驱动传感器、Flash、屏幕等外设。
- ADC/DAC:模拟量采集和输出。
- DMA:提升数据搬运效率。
- CAN/RS485/以太网:进入工业通信和网络通信。
- RTOS:复杂项目的任务组织。
- 综合项目:把多个模块组织成一个稳定系统。
这个顺序不是唯一的,但要符合一个原则:先理解最基础的输入输出,再学复杂协议和系统架构。不要一上来就想造火箭。
12.3 工程师看单片机项目的几个层次
一个成熟工程师看单片机项目,通常不会只问 代码怎么写 ,而是从以下几个层次判断:
| 层次 | 关注点 |
|---|---|
| 硬件层 | 电源、复位、时钟、接口保护、信号完整性 |
| 驱动层 | 外设初始化、寄存器配置、时序、错误处理 |
| 中间层 | 协议解析、设备抽象、缓冲区、状态机 |
| 业务层 | 产品功能、用户交互、控制策略 |
| 系统层 | 任务调度、资源分配、低功耗、升级、日志 |
| 量产层 | 测试工装、校准、序列号、版本管理、故障追踪 |
这也是本教程希望大家逐步建立的能力:不是只会让某个外设跑起来,而是能把一个系统做完整。
十三 常见误区和工程经验
13.1 误区一:单片机主频越高越好
主频高当然有价值,但不是越高越好。
主频提高后通常会带来:
- 功耗增加。
- EMI 变差。
- 时钟树配置更复杂。
- 对电源和 PCB 要求更高。
- 某些外设分频更难凑出目标频率。
如果一个项目只是每秒读几次温度、控制继电器,8MHz 甚至更低主频都够用。工程上要按需求选择频率,而不是无脑拉满。
13.2 误区二:能通信就代表电平没问题
有些 3.3V 和 5V 设备直接连接,短时间看起来能通信,但这不代表设计正确。
风险可能包括:
- 高电平阈值勉强满足,温度变化后不稳定。
- 非 5V 容忍引脚被过压,短期没坏,长期可靠性下降。
- 长线干扰导致偶发错误。
- 上电顺序不同导致反向灌电流。
工程上不能只看现在能跑,还要看是否满足手册的电气规格。笔者同时也负责庐山派,就有几个用户反馈自己的庐山派用着用着就烧了,结果发接线图给我看,原来他用的串口工具的那个IO是5V的,但是庐山派就只能支持最高3.3V的IO,可能短时间没问题,但长时间使用就直接造成芯片损毁了,而且有些初学者还会和我犟,明明自己都分不清电源的5V和IO的3.3V电平不是一个东西。
13.3 误区三:中断里想做什么就做什么
中断是处理紧急事件的工具,但中断函数里不应该做太多事情。
不推荐在中断里:
- 长时间延时。
- 打印大量日志。
- 做复杂浮点计算。
- 等待另一个外设完成。
- 调用可能阻塞的函数。
更推荐的做法是:
- 中断里读取必要状态。
- 清除中断标志。
- 保存数据或设置标志位。
- 复杂处理放到主循环或 RTOS 任务里。
这样系统响应更可控,也更容易调试。
13.4 误区四:所有延时都用 delay
delay_ms() 在点灯实验里很好用,但在复杂项目里滥用延时会让系统变得迟钝。
例如主循环里写:
while (1)
{
read_sensor();
delay_ms(1000);
update_display();
}这一秒延时期间,程序就无法及时处理按键、通信或保护事件。
更好的方式是用系统节拍、定时器或任务调度,让不同任务按周期执行,而不是用阻塞延时把 CPU 原地按住。
13.5 误区五:只会看例程,不会看手册
例程告诉你【可以这样用】 ,手册告诉你【为什么这样用,以及边界在哪里】。
工程师至少要学会查三类手册:
- 芯片 Datasheet:看电气参数、引脚、封装、绝对最大额定值。
- 芯片 Reference Manual:看外设工作原理和寄存器。
- 外设芯片手册:看通信协议、电气参数、时序和初始化流程。
后续本教程会尽量带大家从手册中找关键内容,而不是只给最终代码。
13.5.1 初学者第一次看手册应该看哪里?
STM32F407 的数据手册和参考手册都很厚,初学者第一次打开很容易被劝退。这里给一个比较实用的阅读顺序:
| 资料 | 优先阅读内容 | 解决什么问题 |
|---|---|---|
| Datasheet | Features | 这颗芯片大概有什么能力 |
| Datasheet | Pinouts and pin description | 某个引脚是什么功能,是否 5V 容忍 |
| Datasheet | Memory mapping | Flash、SRAM、外设地址范围 |
| Datasheet | Electrical characteristics | 电压、电流、时钟、温度、电气边界 |
| Reference Manual | RCC 章节 | 时钟怎么来,外设时钟怎么开 |
| Reference Manual | GPIO 章节 | GPIO 模式、上下拉、复用、寄存器 |
| Reference Manual | 对应外设章节 | UART、SPI、I2C、TIM、ADC 等工作原理 |
| Programming Manual | Cortex-M 指令、异常、中断 | 内核级机制,后期调试异常时用 |
上面这些资料可以来这里查看:STM32F4芯片相关资料
不要试图从第一页读到最后一页。工程师查手册通常是带着问题去查:
- 我这个引脚能不能当 ADC?
- 这个引脚能不能直接接 5V?
- SPI2 最高能跑多快?
- USART1 挂在哪条总线上?
- 定时器更新中断标志怎么清?
- Flash 擦写一页多大,寿命多少次?
有问题,再去对应章节找答案。这样手册就不是压力,而是工具。
13.6 误区六:把 跑通一次 当成 已经掌握
开发板实验能跑通一次,只能说明当前条件下这条路径是通的。笔者小时候做暑假作业,如果先看过答案的话我就会觉得这个太简单了,简直就是洒洒水啦;但是如果这个答案被撕掉了,就会感觉好难啊;
拿着官方提供的例程,或者跟着教程一字不落地敲了一遍代码,成功点亮了一颗LED,或者让屏幕显示出了字符,就觉得自己已经【精通】了这个外设,甚至感觉这颗芯片也不过如此。
真正掌握一个外设,至少要能回答下面这些问题:
- 它的硬件连接是什么?
- 它需要什么电源和电平?
- 它属于哪条总线,时钟从哪里来?
- 它有哪些关键寄存器或 HAL 配置项?
- 它正常工作的时序或协议是什么?
- 它失败时有哪些状态标志或错误码?
- 它和其他外设是否有引脚、DMA、中断、时钟冲突?
- 它的速度、精度、电流、温度范围边界在哪里?
比如 串口能打印 hello world 只是入门;真正掌握串口,还要理解波特率误差、帧格式、接收中断、DMA 环形缓冲、粘包拆包、超时处理和电平转换等相关知识。
学习单片机要允许自己先跑通,但请不要只停留在跑通。
十四 用天空星筑基学习板理解单片机
14.1 天空星核心板和筑基学习板的分工
在本套教程中,天空星核心板和筑基学习板的关系非常适合用来理解单片机系统。
- 天空星核心板:提供 STM32F407 主控、晶振、复位、下载调试接口、基础电源和 TF 卡座等最小系统资源。
- 筑基学习板:提供电机、传感器、通信接口、音频、屏幕、蜂鸣器、继电器、电源监测等外部功能模块。
也就是说,天空星核心板 = 单片机最小运行平台;筑基学习板 = 真实外设和工程场景集合
如果只看核心板,你能学到 MCU 怎么运行。
如果加上筑基学习板,你能学到 MCU 如何控制真实外设、如何处理资源复用、如何面对工程冲突。
14.2 为什么学习板要有这么多外设?
很多入门开发板只提供 LED、按键、串口和几个传感器,适合入门,但很难体现真实项目的复杂度。
筑基学习板外设多,不只是为了 看起来丰富 ,更重要的是让大家提前接触工程问题:
- 多个设备共用 I2C 总线,如何管理地址和带载能力。
- SPI、I2S、Flash、屏幕之间如何处理资源分配。
- 电机、继电器、蜂鸣器这类负载如何避免干扰主控。
- 隔离 CAN、隔离 RS485 为什么要隔离。
- 拨码开关和模拟开关如何解决引脚不够的问题。
- 电源监控为什么对系统可靠性有价值。
这些问题才是从 会点灯 走向 会做项目 的关键。
14.3 初学者该如何使用这块板
建议大家每学一个外设,都按下面几个问题去理解:
- 这个外设在板子上长什么样,接在哪里?
- 它和 STM32 的哪些引脚相连?
- 它需要什么电源和电平?
- 它使用什么通信方式或控制方式?
- 使用前是否要拨码开关或跳线配置?
- 程序初始化步骤是什么?
- 正常现象是什么?
- 如果不工作,最可能的原因有哪些?
笔者特地做了这个在线交互式文档来帮助大家快速找到对应的外设:天空星·筑基学习板引脚分配速查交互式文档
只要坚持用这套问题去看每个模块,你会发现不同外设虽然表面不同,但底层分析方法是相通的。
十五 本章总结
本章我们没有写具体代码,而是先把单片机这件事讲清楚。
单片机不是神秘的黑盒,它本质上是一颗集成了 CPU、存储器、总线、外设、时钟、复位和调试能力的控制芯片。我们写的程序经过编译后存入 Flash,上电后 CPU 从 Flash 取指令执行,通过读写寄存器控制 GPIO、定时器、串口、ADC 等硬件外设,最终表现为外部引脚上的电平、波形和通信数据。
对于初学者,本章最重要的是建立整体地图:知道后续每一章学的 GPIO、定时器、串口、I2C、SPI、ADC 都是单片机内部外设的一部分。
对于工程师,本章更重要的是提醒:单片机开发不是单纯写代码,而是软硬件结合的系统工程。实时性、可靠性、资源规划、电气边界、异常恢复和可维护性,才是产品能否长期稳定运行的关键。
下一步,我们会继续围绕天空星 STM32F407 平台,逐步认识具体芯片、开发环境和各类外设。