红外循迹传感器采用TCRT5000红外反射传感器,一种集发射与接收于一体的光电传感器,它由一个红外发光二极管和一个NPN红外光电三极管组成。检测反射距离1mm-25mm适用,传感器特设M3固定安装孔,调节方向与固定方便易用,使用宽电压LM393比较器,信号干净,波形好,驱动能力强,超过15mA。可以应用于机器人避障、机器人进行白线或者黑线的跟踪,可以检测白底中的黑线,也可以检测黑底中的白线,是寻线机器人的必备传感器。
一、模块来源
二、规格参数
工作电压:3.3V-5V
检测反射距离:1mm~25mm适用
输出方式: DO接口为数字量输出;AO接口为模拟量输出
读取方式:ADC
管脚数量:4 Pin(2.54mm间距排针)
以上信息见厂家资料文件
三、移植过程
我们的目标是将例程移植至开发板上【能够实现检测黑线的功能】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
1、查看资料
TCRT5000 传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态;被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和,此时模块的输出端为低电平,指示二极管被点亮。
其对应的原理图见下图,AO输出为红外循迹传感器直接输出的电压,所以为模拟量;DO为经过LM393进行电压比较后,输出高低电平,所以为数字量。
因此DO引脚可以配置为GPIO的输入模式,AO引脚需要配置为ADC模拟输入模式。
2、引脚选择
当前只有AO引脚需要使用到ADC接口,所以DO引脚可以使用开发板上其他的GPIO。这里选择使用PB0的附加ADC功能。
| VCC | 5V0 |
| GND | GND |
| DO | PB2 |
| AO | PB0 |
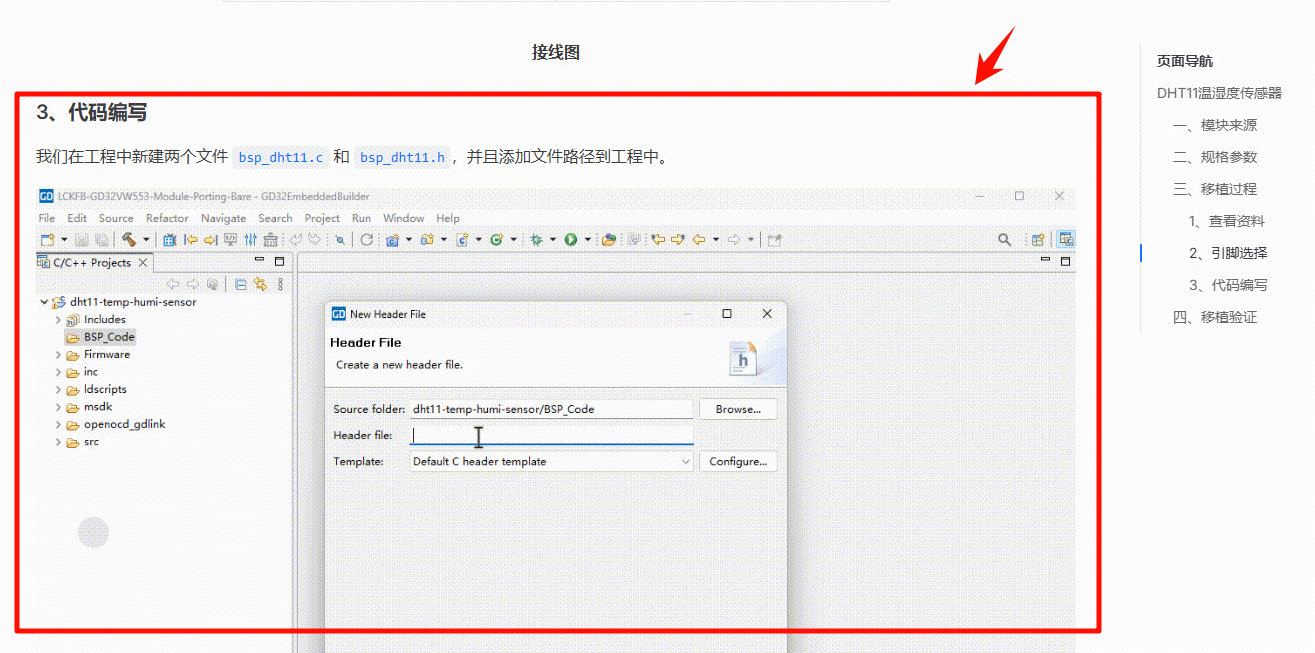
3、代码编写
新建两个文件 bsp_irtracking.c 和 bsp_irtracking.h,并且将头文件路径添加到编译器中。
在文件 bsp_irtracking.c 和 bsp_irtracking.h 中,编写如下代码。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#ifndef BSP_CODE_BSP_IRTRACKING_H_
#define BSP_CODE_BSP_IRTRACKING_H_
#include "gd32vw55x.h"
#include "systick.h"
#ifndef delay_ms
#define delay_ms(x) delay_1ms(x)
#endif
#ifndef delay_us
#define delay_us(x) delay_1us(x)
#endif
#define MODULE_BSP_RCU_ENABLE() \
rcu_periph_clock_enable(BSP_ADC_GPIO_RCU); \
rcu_periph_clock_enable(BSP_DO_GPIO_RCU); \
rcu_periph_clock_enable(BSP_ADC_RCU);
/* PB0 ADC_IN8 */
#define BSP_ADC_GPIO_RCU RCU_GPIOB
#define BSP_ADC_GPIO_PORT GPIOB
#define BSP_ADC_GPIO_PIN GPIO_PIN_0
/* PB0 ADC_IN8 */
#define BSP_ADC_RCU RCU_ADC
#define BSP_ADC ADC
#define BSP_ADC_CHANNEL ADC_CHANNEL_8
#define BSP_DO_GPIO_RCU RCU_GPIOB
#define BSP_DO_GPIO_PORT GPIOB
#define BSP_DO_GPIO_PIN GPIO_PIN_2
#define IR_DO gpio_input_bit_get(BSP_DO_GPIO_PORT, BSP_DO_GPIO_PIN)
//采样次数
#define SAMPLES 5
void Module_BSP_Init(void);
int Get_ADC_TRACK_Value(void);//读取AO值
char Get_TRACK_DO(void);//读取DO值
#endif /* BSP_CODE_BSP_IRTRACKING_H_ *//*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#include "bsp_irtracking.h"
#include "stdio.h"
void Module_BSP_Init(void)
{
/* 使能ADC和GPIO时钟 */
MODULE_BSP_RCU_ENABLE();
// 配置DO引脚为输入模式
gpio_mode_set(BSP_DO_GPIO_PORT, GPIO_MODE_INPUT, GPIO_PUPD_NONE, BSP_DO_GPIO_PIN);
// 配置ADC时钟为4分频
adc_clock_config(ADC_ADCCK_PCLK2_DIV4);
// 配置引脚为模拟浮空输入模式
gpio_mode_set(BSP_ADC_GPIO_PORT, GPIO_MODE_ANALOG, GPIO_PUPD_NONE, BSP_ADC_GPIO_PIN);
// 使能扫描模式
adc_special_function_config(ADC_SCAN_MODE, ENABLE);
// 数据右对齐
adc_data_alignment_config(ADC_DATAALIGN_RIGHT);
// ADC设置为12位分辨率
adc_resolution_config(ADC_RESOLUTION_12B);
// ADC设置为规则组 一共使用 1 个通道
adc_channel_length_config(ADC_ROUTINE_CHANNEL, 1);
// ADC外部触发禁用, 即只能使用软件触发
adc_external_trigger_config(ADC_ROUTINE_CHANNEL,EXTERNAL_TRIGGER_DISABLE);
// 使能软件触发
adc_software_trigger_enable(ADC_ROUTINE_CHANNEL);
// ADC使能
adc_enable();
}
/**********************************************************
* 函 数 名 称:ADC_GET
* 函 数 功 能:读取一次ADC数据
* 传 入 参 数:无
* 函 数 返 回:无
* 作 者:LCKFB
* 备 注:LP
**********************************************************/
static int ADC_GET(void)
{
int gAdcResult = 0;
int timeOut = 1000;
// 设置采集通道
adc_routine_channel_config(0, BSP_ADC_CHANNEL, ADC_SAMPLETIME_14POINT5);
// 开始软件转换
adc_software_trigger_enable(ADC_ROUTINE_CHANNEL);
// 等待ADC总线处理完成
while(!adc_flag_get(ADC_FLAG_EOC) && timeOut--)
{
delay_us(1);
}
// 清除ADC采样完成标志位
adc_flag_clear(ADC_FLAG_EOC);
if(!timeOut)
{
printf("ADC_GET Failed!!!\r\n");
return 0;
}
// 获取通道的转换结果
gAdcResult = adc_routine_data_read();
// printf("gAdcResult = %d\r\n",gAdcResult);
return gAdcResult;
}
/******************************************************************
* 函 数 名 称:Get_ADC_Value
* 函 数 说 明:对ADC值进行平均值计算后输出
* 函 数 形 参:
* 函 数 返 回:对应扫描的ADC值
* 作 者:LCKFB
* 备 注:无
******************************************************************/
int Get_ADC_TRACK_Value(void)
{
char i = 0;
int AdcValue = 0;
/* 因为采集 SAMPLES 次,故循环 SAMPLES 次 */
for(i = 0; i < SAMPLES; i++)
{
/* 累加 */
AdcValue += ADC_GET();
}
/* 求平均值 */
AdcValue = AdcValue / SAMPLES;
return AdcValue;
}
/******************************************************************
* 函 数 名 称:Get_TRACK_DO
* 函 数 说 明:读取传感器识别状态
* 函 数 形 参:无
* 函 数 返 回:1=识别为黑色 0=识别的不是黑色
* 作 者:LCKFB
* 备 注:可以通过模块上的可调电阻调整识别黑色的阈值
******************************************************************/
char Get_TRACK_DO(void)
{
if( IR_DO == 1 )
{
return 1;
}
else
{
return 0;
}
}四、移植验证
在 src\main.c 中输入代码如下:
#include "gd32vw55x.h"
#include "systick.h"
#include <stdio.h>
#include "main.h"
#include "gd32vw553h_eval.h"
#include "bsp_irtracking.h"
/*!
\brief toggle the led every 500ms
\param[in] none
\param[out] none
\retval none
*/
void led_spark(void)
{
static __IO uint32_t timingdelaylocal = 0U;
if(timingdelaylocal) {
if(timingdelaylocal < 500U) {
gd_eval_led_on(LED1);
} else {
gd_eval_led_off(LED1);
}
timingdelaylocal--;
} else {
timingdelaylocal = 1000U;
}
}
/*!
\brief main function
\param[in] none
\param[out] none
\retval none
*/
int main(void)
{
#ifdef __FIRMWARE_VERSION_DEFINE
uint32_t fw_ver = 0;
#endif /* __FIRMWARE_VERSION_DEFINE */
/* configure systick */
systick_config();
eclic_priority_group_set(ECLIC_PRIGROUP_LEVEL3_PRIO1);
/* initilize the LEDs, USART and key */
gd_eval_led_init(LED1);
gd_eval_com_init(EVAL_COM0);
gd_eval_key_init(KEY_TAMPER_WAKEUP, KEY_MODE_GPIO);
#ifdef __FIRMWARE_VERSION_DEFINE
fw_ver = gd32vw55x_firmware_version_get();
printf("\r\n= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =\r\n\n");
printf("\r\n=== Welcome to use the LC-GD32VW553-HMQ6 development board ====\r\n\n");
printf("\r\n======================= www.lckfb.com =========================\r\n\n");
printf("\r\n======================= wiki.lckfb.com ========================\r\n\n");
printf("\r\n= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =\r\n");
/* print firmware version */
printf("\r\nGD32VW55X series firmware version: V%d.%d.%d", (uint8_t)(fw_ver >> 24), (uint8_t)(fw_ver >> 16), (uint8_t)(fw_ver >> 8));
#endif /* __FIRMWARE_VERSION_DEFINE */
/* print out the clock frequency of system, AHB, APB1 and APB2 */
printf("\r\nCK_SYS is %d\r\n", rcu_clock_freq_get(CK_SYS));
printf("\r\nCK_AHB is %d\r\n", rcu_clock_freq_get(CK_AHB));
printf("\r\nCK_APB1 is %d\r\n", rcu_clock_freq_get(CK_APB1));
printf("\r\nCK_APB2 is %d\r\n", rcu_clock_freq_get(CK_APB2));
Module_BSP_Init(); //初始化BSP
printf("\r\nBSP Module Initialized.\r\n");
while(1)
{
printf("\n");
printf("AO Value = %d\r\n", Get_ADC_TRACK_Value());
printf("DO Value = %d\r\n", Get_TRACK_DO());
delay_ms(100);
}
}上电效果:
【代码下载】
- 跳转到
下载中心去下载模块移植代码:【点击跳转🚀】