1 本节介绍
📝本节您将学习如何通过庐山派来检测人脸朝向,如无特殊说明,以后所有例程的显示设备均为通过外接立创·3.1寸屏幕扩展板,在3.1寸小屏幕上显示。若用户无3.1寸屏幕扩展板也可以正常在IDE的缓冲区,只是受限于USB带宽,可能会帧率较低或卡顿。
🏆学习目标
1️⃣如何用庐山派开发板去检测人脸朝向。
2️⃣如何获取人脸朝向的欧拉角信息。
庐山派开发板的固件是存储在TF中的,模型文件已经提前写入到固件中了,所以大家只需要复制下面的代码到IDE,传递到开发板上就可以正常运行了。无需再额外拷贝,至于后面需要拷贝自己训练的模型那就是后话了。
在人脸朝向检测中,我们主要实现的就是通过摄像头捕获图像,检测人脸的位置,然后去计算人脸的姿态(俯仰角Pitch、偏航角Yaw、滚转角Roll)。这些信息可广泛应用于人机交互、驾驶员疲劳检测和增强现实等领域。和之前介绍的例程类似,他也是先通过人脸检测来定位图像中的人脸,然后在这个人脸范围内去计算人脸的旋转矩阵(3x3矩阵),并转化成欧拉角方便显示。
用这个代码再进行下一步应用层的编写,我们就能判断面向摄像头的人脸是否正视镜头、是否处于侧脸状态、是否低头或者仰头。
2 代码历程
from libs.PipeLine import PipeLine, ScopedTiming
from libs.AIBase import AIBase
from libs.AI2D import Ai2d
import os
import ujson
from media.media import *
from time import *
import nncase_runtime as nn
import ulab.numpy as np
import time
import image
import aidemo
import random
import gc
import sys
# 自定义人脸检测任务类
class FaceDetApp(AIBase):
def __init__(self,kmodel_path,model_input_size,anchors,confidence_threshold=0.25,nms_threshold=0.3,rgb888p_size=[1280,720],display_size=[1920,1080],debug_mode=0):
super().__init__(kmodel_path,model_input_size,rgb888p_size,debug_mode)
# kmodel路径
self.kmodel_path=kmodel_path
# 检测模型输入分辨率
self.model_input_size=model_input_size
# 置信度阈值
self.confidence_threshold=confidence_threshold
# nms阈值
self.nms_threshold=nms_threshold
self.anchors=anchors
# sensor给到AI的图像分辨率,宽16字节对齐
self.rgb888p_size=[ALIGN_UP(rgb888p_size[0],16),rgb888p_size[1]]
# 视频输出VO分辨率,宽16字节对齐
self.display_size=[ALIGN_UP(display_size[0],16),display_size[1]]
# debug模式
self.debug_mode=debug_mode
# 实例化Ai2d,用于实现模型预处理
self.ai2d=Ai2d(debug_mode)
# 设置Ai2d的输入输出格式和类型
self.ai2d.set_ai2d_dtype(nn.ai2d_format.NCHW_FMT,nn.ai2d_format.NCHW_FMT,np.uint8, np.uint8)
# 配置预处理操作,这里使用了pad和resize,Ai2d支持crop/shift/pad/resize/affine,具体代码请打开/sdcard/app/libs/AI2D.py查看
def config_preprocess(self,input_image_size=None):
with ScopedTiming("set preprocess config",self.debug_mode > 0):
# 初始化ai2d预处理配置,默认为sensor给到AI的尺寸,可以通过设置input_image_size自行修改输入尺寸
ai2d_input_size=input_image_size if input_image_size else self.rgb888p_size
# 计算padding参数,并设置padding预处理
self.ai2d.pad(self.get_pad_param(), 0, [104,117,123])
# 设置resize预处理
self.ai2d.resize(nn.interp_method.tf_bilinear, nn.interp_mode.half_pixel)
# 构建预处理流程,参数为预处理输入tensor的shape和预处理输出的tensor的shape
self.ai2d.build([1,3,ai2d_input_size[1],ai2d_input_size[0]],[1,3,self.model_input_size[1],self.model_input_size[0]])
# 自定义后处理,results是模型输出的array列表,这里使用了aidemo库的face_det_post_process接口
def postprocess(self,results):
with ScopedTiming("postprocess",self.debug_mode > 0):
res = aidemo.face_det_post_process(self.confidence_threshold,self.nms_threshold,self.model_input_size[0],self.anchors,self.rgb888p_size,results)
if len(res)==0:
return res
else:
return res[0]
# 计算padding参数
def get_pad_param(self):
dst_w = self.model_input_size[0]
dst_h = self.model_input_size[1]
# 计算最小的缩放比例,等比例缩放
ratio_w = dst_w / self.rgb888p_size[0]
ratio_h = dst_h / self.rgb888p_size[1]
if ratio_w < ratio_h:
ratio = ratio_w
else:
ratio = ratio_h
new_w = (int)(ratio * self.rgb888p_size[0])
new_h = (int)(ratio * self.rgb888p_size[1])
dw = (dst_w - new_w) / 2
dh = (dst_h - new_h) / 2
top = (int)(round(0))
bottom = (int)(round(dh * 2 + 0.1))
left = (int)(round(0))
right = (int)(round(dw * 2 - 0.1))
return [0,0,0,0,top, bottom, left, right]
# 自定义人脸姿态任务类
class FacePoseApp(AIBase):
def __init__(self,kmodel_path,model_input_size,rgb888p_size=[1920,1080],display_size=[1920,1080],debug_mode=0):
super().__init__(kmodel_path,model_input_size,rgb888p_size,debug_mode)
# kmodel路径
self.kmodel_path=kmodel_path
# 人脸姿态模型输入分辨率
self.model_input_size=model_input_size
# sensor给到AI的图像分辨率,宽16字节对齐
self.rgb888p_size=[ALIGN_UP(rgb888p_size[0],16),rgb888p_size[1]]
# 视频输出VO分辨率,宽16字节对齐
self.display_size=[ALIGN_UP(display_size[0],16),display_size[1]]
# debug模式
self.debug_mode=debug_mode
# 实例化Ai2d,用于实现模型预处理
self.ai2d=Ai2d(debug_mode)
# 设置Ai2d的输入输出格式和类型
self.ai2d.set_ai2d_dtype(nn.ai2d_format.NCHW_FMT,nn.ai2d_format.NCHW_FMT,np.uint8, np.uint8)
# 配置预处理操作,这里使用了affine,Ai2d支持crop/shift/pad/resize/affine,具体代码请打开/sdcard/app/libs/AI2D.py查看
def config_preprocess(self,det,input_image_size=None):
with ScopedTiming("set preprocess config",self.debug_mode > 0):
# 初始化ai2d预处理配置,默认为sensor给到AI的尺寸,可以通过设置input_image_size自行修改输入尺寸
ai2d_input_size=input_image_size if input_image_size else self.rgb888p_size
# 计算affine矩阵并设置affine预处理
matrix_dst = self.get_affine_matrix(det)
self.ai2d.affine(nn.interp_method.cv2_bilinear,0, 0, 127, 1,matrix_dst)
# 构建预处理流程,参数为预处理输入tensor的shape和预处理输出的tensor的shape
self.ai2d.build([1,3,ai2d_input_size[1],ai2d_input_size[0]],[1,3,self.model_input_size[1],self.model_input_size[0]])
# 自定义后处理,results是模型输出的array列表,计算欧拉角
def postprocess(self,results):
with ScopedTiming("postprocess",self.debug_mode > 0):
R,eular = self.get_euler(results[0][0])
return R,eular
def get_affine_matrix(self,bbox):
# 获取仿射矩阵,用于将边界框映射到模型输入空间
with ScopedTiming("get_affine_matrix", self.debug_mode > 1):
# 设置缩放因子
factor = 2.7
# 从边界框提取坐标和尺寸
x1, y1, w, h = map(lambda x: int(round(x, 0)), bbox[:4])
# 模型输入大小
edge_size = self.model_input_size[1]
# 平移距离,使得模型输入空间的中心对准原点
trans_distance = edge_size / 2.0
# 计算边界框中心点的坐标
center_x = x1 + w / 2.0
center_y = y1 + h / 2.0
# 计算最大边长
maximum_edge = factor * (h if h > w else w)
# 计算缩放比例
scale = edge_size * 2.0 / maximum_edge
# 计算平移参数
cx = trans_distance - scale * center_x
cy = trans_distance - scale * center_y
# 创建仿射矩阵
affine_matrix = [scale, 0, cx, 0, scale, cy]
return affine_matrix
def rotation_matrix_to_euler_angles(self,R):
# 将旋转矩阵(3x3 矩阵)转换为欧拉角(pitch、yaw、roll)
# 计算 sin(yaw)
sy = np.sqrt(R[0, 0] ** 2 + R[1, 0] ** 2)
if sy < 1e-6:
# 若 sin(yaw) 过小,说明 pitch 接近 ±90 度
pitch = np.arctan2(-R[1, 2], R[1, 1]) * 180 / np.pi
yaw = np.arctan2(-R[2, 0], sy) * 180 / np.pi
roll = 0
else:
# 计算 pitch、yaw、roll 的角度
pitch = np.arctan2(R[2, 1], R[2, 2]) * 180 / np.pi
yaw = np.arctan2(-R[2, 0], sy) * 180 / np.pi
roll = np.arctan2(R[1, 0], R[0, 0]) * 180 / np.pi
return [pitch,yaw,roll]
def get_euler(self,data):
# 获取旋转矩阵和欧拉角
R = data[:3, :3].copy()
eular = self.rotation_matrix_to_euler_angles(R)
return R,eular
# 人脸姿态任务类
class FacePose:
def __init__(self,face_det_kmodel,face_pose_kmodel,det_input_size,pose_input_size,anchors,confidence_threshold=0.25,nms_threshold=0.3,rgb888p_size=[1280,720],display_size=[1920,1080],debug_mode=0):
# 人脸检测模型路径
self.face_det_kmodel=face_det_kmodel
# 人脸姿态模型路径
self.face_pose_kmodel=face_pose_kmodel
# 人脸检测模型输入分辨率
self.det_input_size=det_input_size
# 人脸姿态模型输入分辨率
self.pose_input_size=pose_input_size
# anchors
self.anchors=anchors
# 置信度阈值
self.confidence_threshold=confidence_threshold
# nms阈值
self.nms_threshold=nms_threshold
# sensor给到AI的图像分辨率,宽16字节对齐
self.rgb888p_size=[ALIGN_UP(rgb888p_size[0],16),rgb888p_size[1]]
# 视频输出VO分辨率,宽16字节对齐
self.display_size=[ALIGN_UP(display_size[0],16),display_size[1]]
# debug_mode模式
self.debug_mode=debug_mode
self.face_det=FaceDetApp(self.face_det_kmodel,model_input_size=self.det_input_size,anchors=self.anchors,confidence_threshold=self.confidence_threshold,nms_threshold=self.nms_threshold,rgb888p_size=self.rgb888p_size,display_size=self.display_size,debug_mode=0)
self.face_pose=FacePoseApp(self.face_pose_kmodel,model_input_size=self.pose_input_size,rgb888p_size=self.rgb888p_size,display_size=self.display_size)
self.face_det.config_preprocess()
# run函数
def run(self,input_np):
# 人脸检测
det_boxes=self.face_det.run(input_np)
pose_res=[]
for det_box in det_boxes:
# 对检测到的每一个人脸做人脸姿态估计
self.face_pose.config_preprocess(det_box)
R,eular=self.face_pose.run(input_np)
pose_res.append((R,eular))
return det_boxes,pose_res
# 绘制人脸姿态角效果
def draw_result(self,pl,dets,pose_res):
pl.osd_img.clear()
if dets:
draw_img_np = np.zeros((self.display_size[1],self.display_size[0],4),dtype=np.uint8)
draw_img=image.Image(self.display_size[0], self.display_size[1], image.ARGB8888,alloc=image.ALLOC_REF,data=draw_img_np)
line_color = np.array([255, 0, 0 ,255],dtype=np.uint8) #bgra
for i,det in enumerate(dets):
# (1)获取人脸姿态矩阵和欧拉角
projections,center_point = self.build_projection_matrix(det)
R,euler = pose_res[i]
# (2)遍历人脸投影矩阵的关键点,进行投影,并将结果画在图像上
first_points = []
second_points = []
for pp in range(8):
sum_x, sum_y = 0.0, 0.0
for cc in range(3):
sum_x += projections[pp][cc] * R[cc][0]
sum_y += projections[pp][cc] * (-R[cc][1])
center_x,center_y = center_point[0],center_point[1]
x = (sum_x + center_x) / self.rgb888p_size[0] * self.display_size[0]
y = (sum_y + center_y) / self.rgb888p_size[1] * self.display_size[1]
x = max(0, min(x, self.display_size[0]))
y = max(0, min(y, self.display_size[1]))
if pp < 4:
first_points.append((x, y))
else:
second_points.append((x, y))
first_points = np.array(first_points,dtype=np.float)
aidemo.polylines(draw_img_np,first_points,True,line_color,2,8,0)
second_points = np.array(second_points,dtype=np.float)
aidemo.polylines(draw_img_np,second_points,True,line_color,2,8,0)
for ll in range(4):
x0, y0 = int(first_points[ll][0]),int(first_points[ll][1])
x1, y1 = int(second_points[ll][0]),int(second_points[ll][1])
draw_img.draw_line(x0, y0, x1, y1, color = (255, 0, 0 ,255), thickness = 2)
pl.osd_img.copy_from(draw_img)
def build_projection_matrix(self,det):
x1, y1, w, h = map(lambda x: int(round(x, 0)), det[:4])
# 计算边界框中心坐标
center_x = x1 + w / 2.0
center_y = y1 + h / 2.0
# 定义后部(rear)和前部(front)的尺寸和深度
rear_width = 0.5 * w
rear_height = 0.5 * h
rear_depth = 0
factor = np.sqrt(2.0)
front_width = factor * rear_width
front_height = factor * rear_height
front_depth = factor * rear_width # 使用宽度来计算深度,也可以使用高度,取决于需求
# 定义立方体的顶点坐标
temp = [
[-rear_width, -rear_height, rear_depth],
[-rear_width, rear_height, rear_depth],
[rear_width, rear_height, rear_depth],
[rear_width, -rear_height, rear_depth],
[-front_width, -front_height, front_depth],
[-front_width, front_height, front_depth],
[front_width, front_height, front_depth],
[front_width, -front_height, front_depth]
]
projections = np.array(temp)
# 返回投影矩阵和中心坐标
return projections, (center_x, center_y)
if __name__=="__main__":
# 显示模式,默认"hdmi",可以选择"hdmi"和"lcd"
display_mode="lcd"
# k230保持不变,k230d可调整为[640,360]
rgb888p_size = [1920, 1080]
if display_mode=="hdmi":
display_size=[1920,1080]
else:
display_size=[800,480]
# 人脸检测模型路径
face_det_kmodel_path="/sdcard/examples/kmodel/face_detection_320.kmodel"
# 人脸姿态模型路径
face_pose_kmodel_path="/sdcard/examples/kmodel/face_pose.kmodel"
# 其它参数
anchors_path="/sdcard/examples/utils/prior_data_320.bin"
face_det_input_size=[320,320]
face_pose_input_size=[120,120]
confidence_threshold=0.5
nms_threshold=0.2
anchor_len=4200
det_dim=4
anchors = np.fromfile(anchors_path, dtype=np.float)
anchors = anchors.reshape((anchor_len,det_dim))
# 初始化PipeLine,只关注传给AI的图像分辨率,显示的分辨率
pl=PipeLine(rgb888p_size=rgb888p_size,display_size=display_size,display_mode=display_mode)
pl.create()
fp=FacePose(face_det_kmodel_path,face_pose_kmodel_path,det_input_size=face_det_input_size,pose_input_size=face_pose_input_size,anchors=anchors,confidence_threshold=confidence_threshold,nms_threshold=nms_threshold,rgb888p_size=rgb888p_size,display_size=display_size)
try:
while True:
os.exitpoint()
with ScopedTiming("total",1):
img=pl.get_frame() # 获取当前帧
det_boxes,pose_res=fp.run(img) # 推理当前帧
fp.draw_result(pl,det_boxes,pose_res) # 绘制推理效果
pl.show_image() # 展示推理效果
gc.collect()
except Exception as e:
sys.print_exception(e)
finally:
fp.face_det.deinit()
fp.face_pose.deinit()
pl.destroy()人脸检测(FaceDetApp类):用于加载人脸检测模型,利用AI2d对原始图像进行处理,然后输出人脸框的坐标和尺寸。
人脸姿态估计(FacePoseApp类):从上一步中获取基于人脸检测得到的人脸框,进行裁剪和变换,用姿态模型来推理出旋转矩阵,再用这个旋转矩阵算出欧拉角。最后就进行示意框架的绘制就好了
得到的欧拉角可以描述人脸在三维空间的转动情况:
- pitch(俯仰角):头部上下抬头、低头角度
- yaw(偏航角):头部左右转动角度
- roll(翻滚角):头部左右倾斜角度
3 运行效果
首先我们准备几张人脸不同朝向的图片: 
在IDE中的运行效果如下所示: 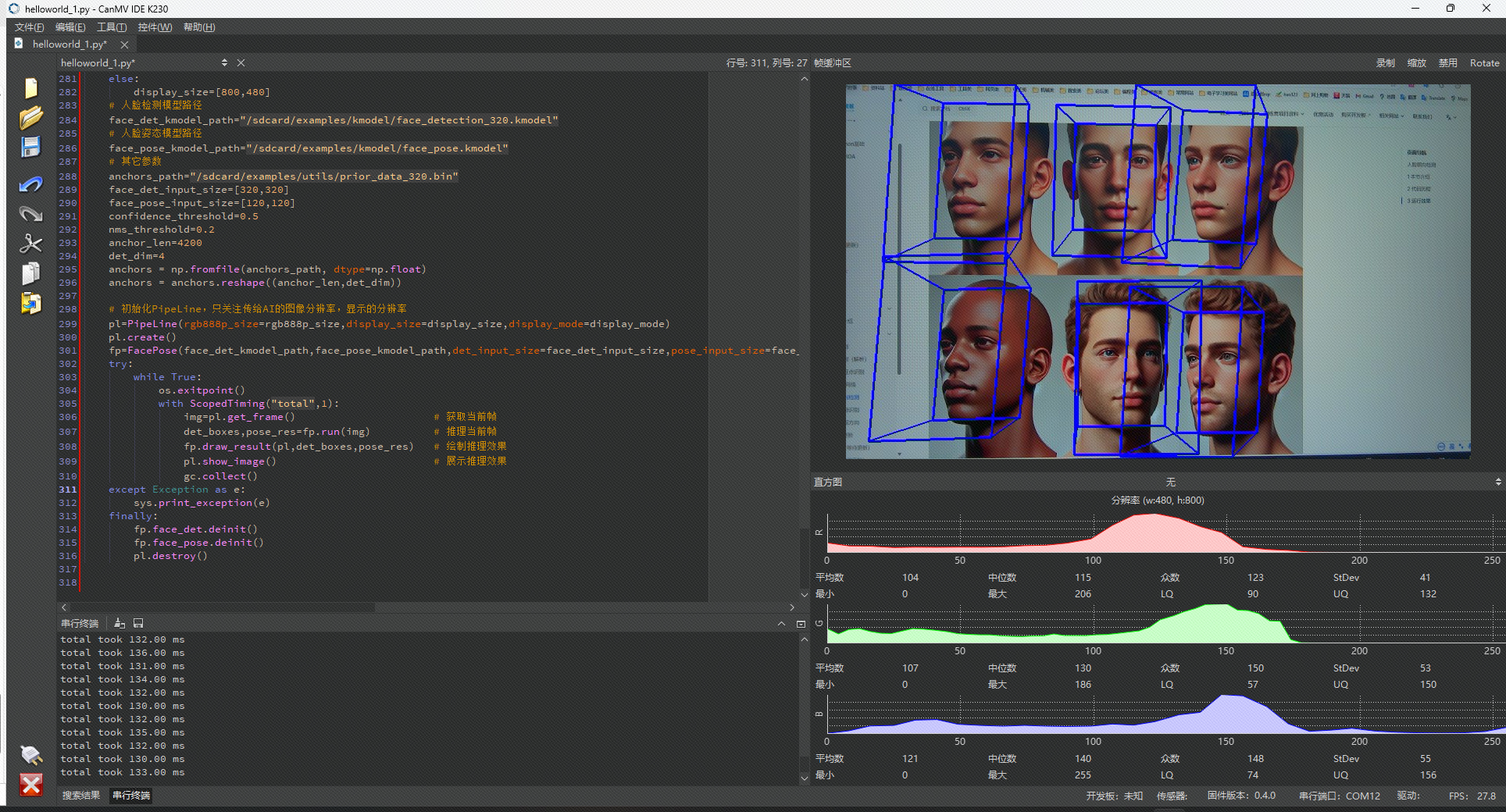
4 获取人脸朝向信息
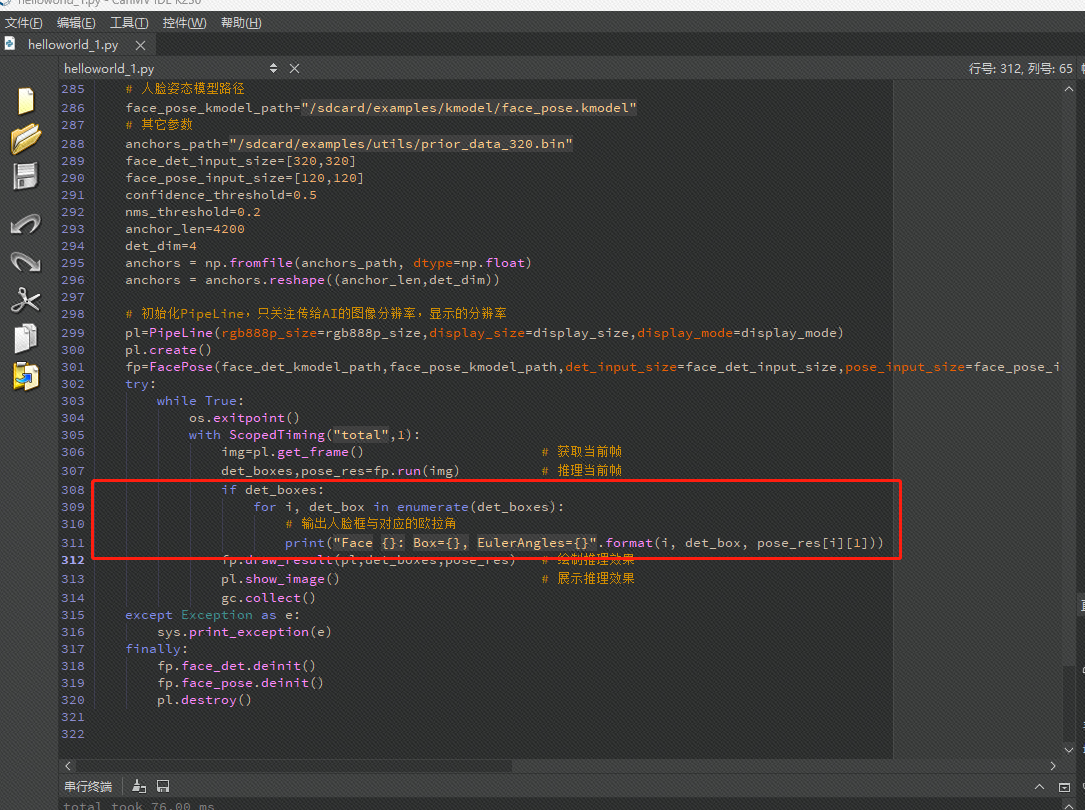
在主函数的推理结束帧 det_boxes,pose_res=fp.run(img) # 推理当前帧结束后加入以下内容:
if det_boxes:
for i, det_box in enumerate(det_boxes):
# 输出人脸框与对应的欧拉角
print("Face {}: Box={}, EulerAngles={}".format(i, det_box, pose_res[i][1]))添加位置如下图所示:
继续将摄像头对准这些不同朝向的人脸,我们可以看到IDE的串行终端就会打印人脸的朝向信息了:
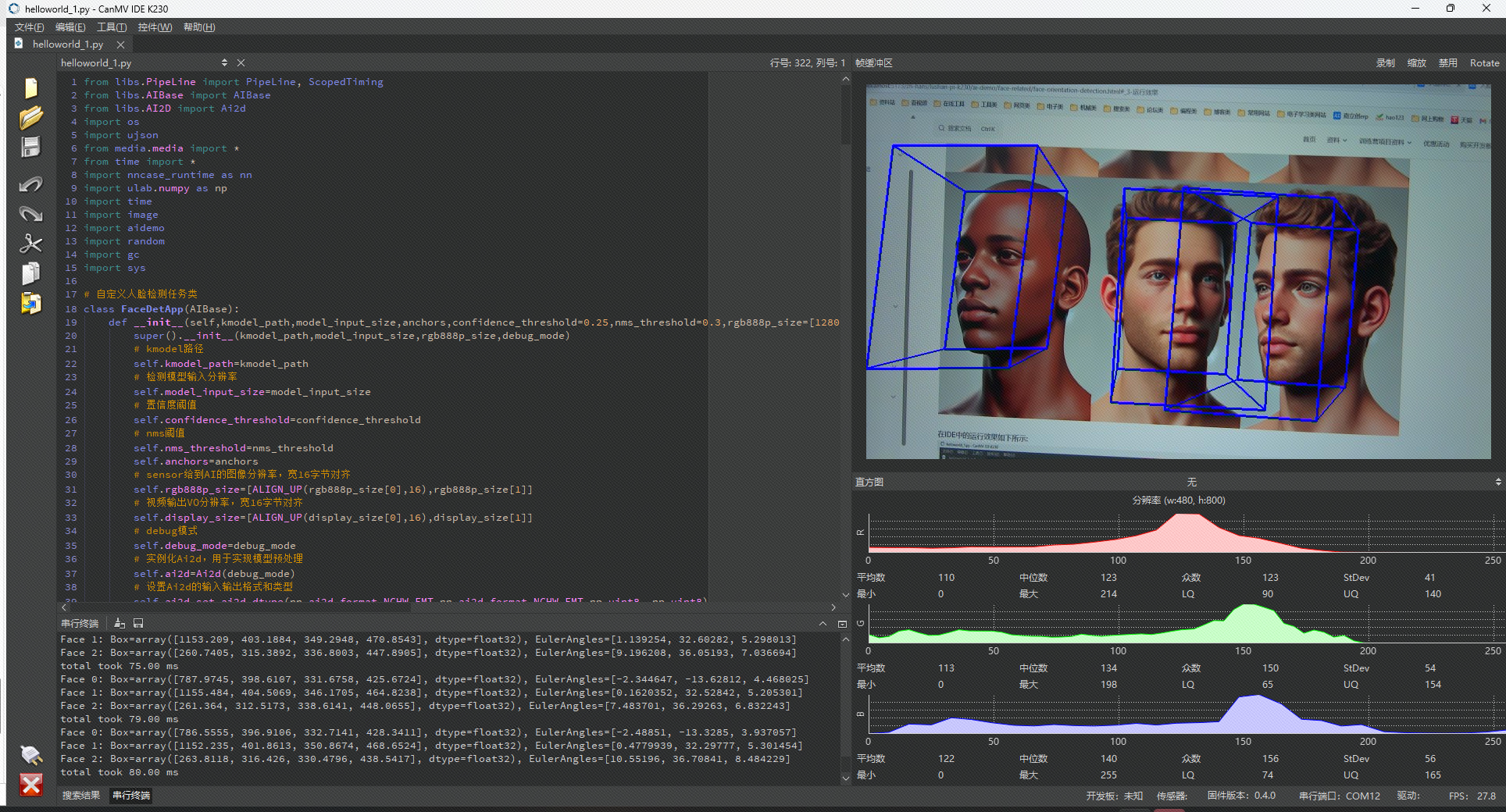
我这里是检测到了三个人脸:
Face 0: Box=array([787.6563, 377.3204, 320.6874, 421.6591], dtype=float32), EulerAngles=[-2.656312, -13.3022, 4.123715]
Face 1: Box=array([1141.927, 406.385, 336.9648, 443.1049], dtype=float32), EulerAngles=[0.9286932, 31.24547, 6.115503]
Face 2: Box=array([269.4192, 307.4334, 315.1303, 441.2481], dtype=float32), EulerAngles=[8.293209, 36.21836, 6.351421]
total took 76.00 ms首先,Face 0, Face 1, Face 2表示检测到的第0张、第1张和第2张人脸,每个编号对应一张人脸。后面跟的Box表示人脸框的位置和大小,用一个数组来表示:[x, y, width, height],x 和 y 是人脸框左上角的坐标,width 是人脸框的宽度,height 是人脸框的高度。
从坐标信息中我们可以看到(靠X坐标来判断),Face0是中间的脸,Face1是右边的脸,Face2是最左边的脸。
然后EulerAngles表示姿态估计的结果,用三个欧拉角来描述人脸在三维空间的旋转情况:
Pitch(俯仰角):脸是往上抬还是往下低,例如 Face 0 的 -2.656312 表示略微低头。
Yaw(偏航角):脸是往左转还是往右转,例如 Face 0 的 -13.3022 表示偏向左边。
Roll(翻滚角):脸是往左倾斜还是往右倾斜,例如 Face 0 的 4.123715 表示略向右倾斜。
最后的total took 76ms就表示我们的庐山派开发板在整个预处理,检测,姿态推到后处理总共花了76毫秒,意思就是处理单张静态图花了这么长的时间。
如果需要将这些信息传递给外部设备,我们就可以结合之前我们学过的UART章节,将这些信息传递给外部设备了。