1 前期知识提示
打开IDE后连接开发板,此时点击左下角的绿色三角运行代码,MicroPyhon脚本并不会保存到TF卡中,而是保存到内存中并开始运行,一旦板子断电,程序(也就是脚本)就丢失了。
在实际开发中,当我们通过 IDE 在线运行验证调试好后,就需要将我们的脚本保存到TF卡中,并让庐山派开发板在脱离电脑连接的情况下,上电后自动运行我们的程序。
庐山派开发板的CanMV固件在上电后会自动执行micropython,他会在sdcard目录中去寻找boot.py和main.py这两个文件。
boot.py
- 启动文件:这是庐山派启动时首先执行的文件,类似于我们嵌入式开发中的初始设置文件。
- 主要功能:
- 配置硬件环境(如I/O引脚、电源管理)。
- 初始化必要的模块(如串口、网络)。
- 一般只用作系统配置,不进行主任务逻辑处理。如果代码较为简单的话,一般不需要建立
boot.py文件 - 一定要注意不能有死循环,否则他会无法执行 main.py。
main.py
- 主程序文件:在
boot.py执行完毕后,系统会自动执行main.py。 - 主要功能:
- 实现用户的核心逻辑。
- 比如图像采集、AI处理、通信或其他任务。
执行流程:
- 上电/复位 → 执行
boot.py,如果找不到就不执行。 - boot.py 执行完成 → 自动执行
main.py。 - main.py 执行完成 → 程序可能结束(如果没有
while循环维持运行,那么主程序会退出)。
2 如何操作
2.1 用CanMV IDE K230来保存
一般情况下我们只需要用到main.py,当你需要用到boot.py的时候也不需要再看这篇文档了。
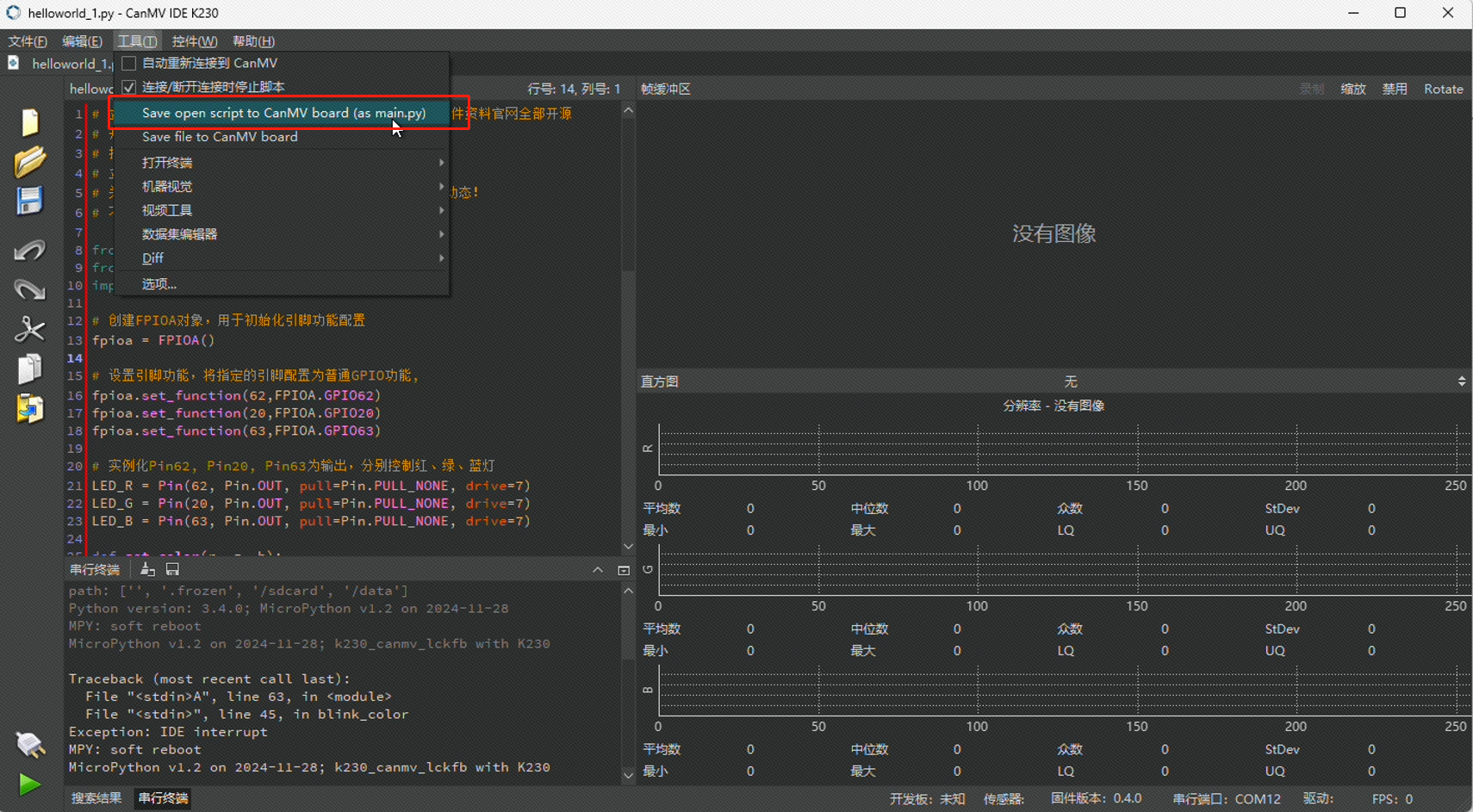
首先打开我们的IDE,连接至我们的开发板后,左下角的绿色三角按钮就会出现了,此时准备好我们的程序,点击菜单栏的工具->save open script to CanMV board (as main.py),就可以把我们当前打开的文件给重命名为main.py,保存到TF卡的sdcard根目录下了。
中间会弹出来一个对话框提示我们是否要去除注释并将空格转化为制表符,直接选择是,然后等待保存进度条走完就可以了。
此时我们就可以断电或者按板子上的复位,检查开发板是否会自动执行你保存的程序了。
2.2 手动保存
在之前我们已经知道了,庐山派在上电后,会自动去找main.py来执行。所以我们只需要将main.py保存到我们的TF卡里面就行了。
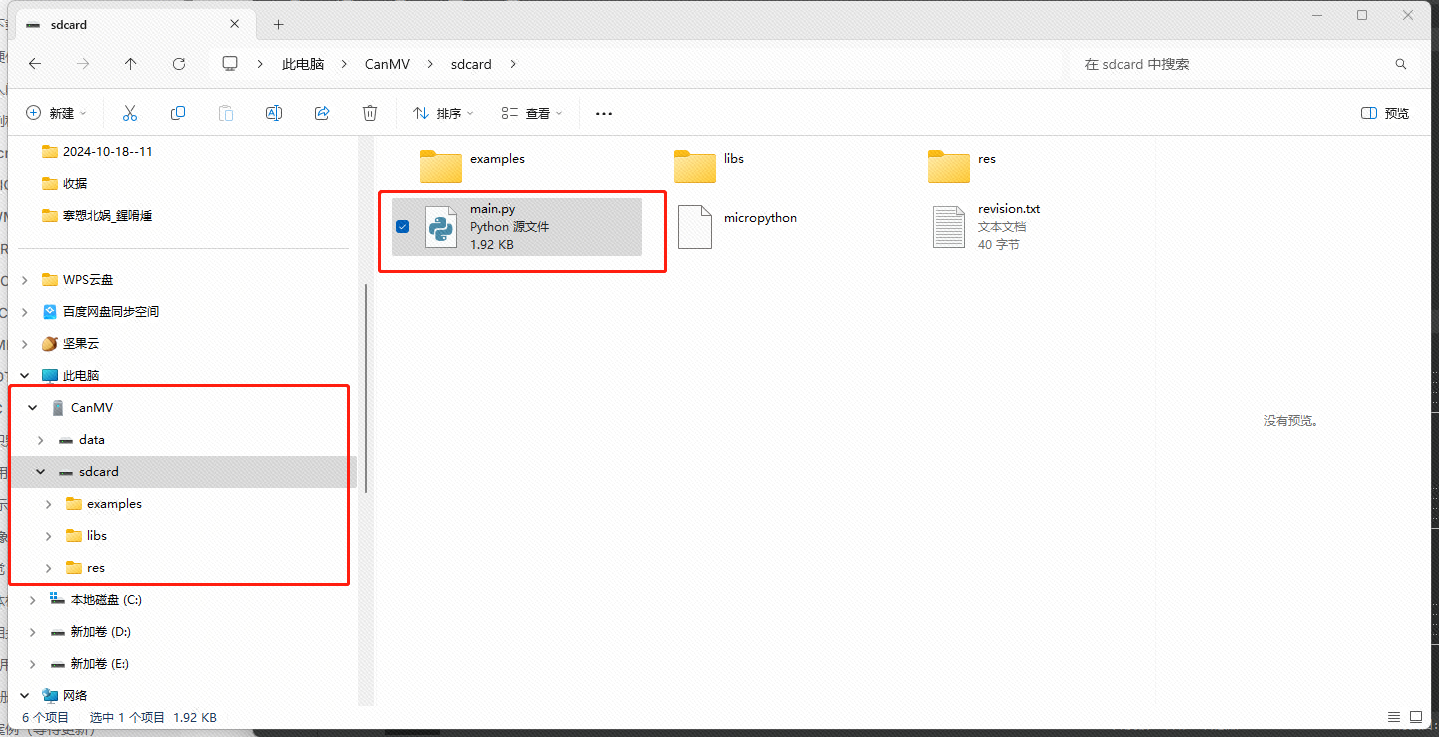
开发板连接电脑后会自动被当做一个U盘设备,我们只需要把自己的程序文件名重命名为main.py,再把他复制到sdcard根目录下就好了,如下图所示:
此时我们就可以断电或者按板子上的复位,检查开发板是否会自动执行你保存的程序了。