到手后先组装,【立创·庐山派K230-CanMV开发板】请参考以下组装视频:
【立创·庐山派Lite-K230D-CanMV开发板】的视频等待更新:
一 本节介绍
1.1 开发板简介
本章适用开发板
本章同时适用于以下两款开发板:
| 立创·庐山派K230-CanMV开发板 | 立创·庐山派Lite-K230D-CanMV开发板 |
|---|---|
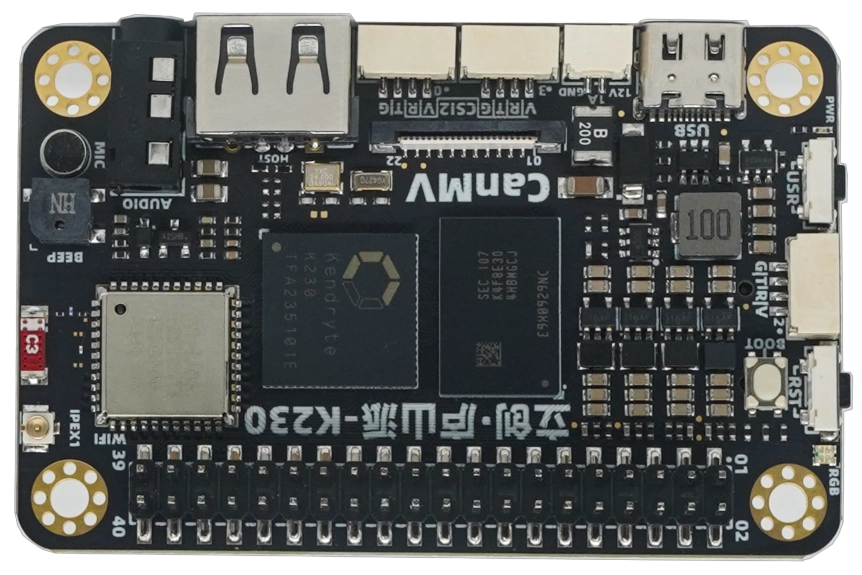 |  |
本章只讲快速入门流程:准备开发环境、获取对应固件、将固件写入 TF 卡、启动开发板,并通过 Visual Studio Code + CanMV 扩展或立创开发板 CanMV IDE Web 连接开发板、运行示例程序。两款板子的固件镜像不同,【下载和烧录时一定要选择与自己开发板完全匹配的固件】,如果烧错固件有可能导致硬件损坏。
该开发板是立创开发板团队精选打造的一款超高性价比的AI 视觉开发板。以嘉楠科技Kendryte®系列AIoT芯片中的最新一代SoC芯片K230为主控芯片,支持三路摄像头同时输入,典型网络下的推理能力可达K210的13.7倍(算力约为6TOPS)。支持CanMV,可以直接使用Python 编程,简单易用。可作为AI与边缘计算平台,适合物联网;智能家居与消费电子;工业自动化;无人系统等领域的开发者使用。
下面是两款开发板的硬件资源标注图。
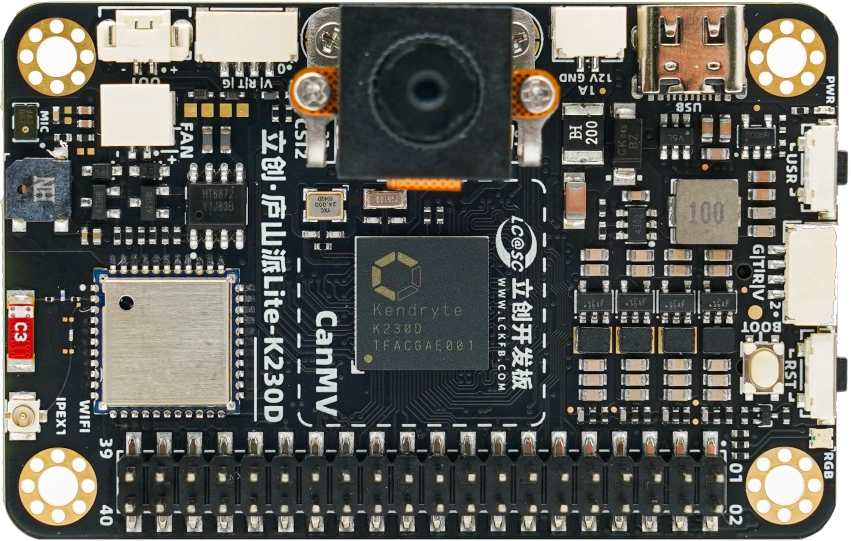
| 立创·庐山派K230-CanMV开发板资源标注 | 立创·庐山派Lite-K230D-CanMV开发板资源标注 |
|---|---|
 |  |
1.2 K230 与 K230D 的主要区别
K230 和 K230D 的核心计算性能几乎没有区别。它们的 CPU、KPU 等核心计算单元属于同一平台,主要差异不在[算力],而在 内存集成方式、封装尺寸、USB / ADC / 引脚引出数量,以及开发板外设配置。庐山派 Lite-K230D 【不是】性能低一档的板子,只不过其所用的主控K230D有更小的封装、更高集成度。
从使用 CanMV MicroPython固件的角度看,两款开发板的入门流程是一样的,但固件镜像、板载外设和可用资源不能混在一起看。快速上手阶段大家先记住一句话:性能基本一致,固件不能混用,资源能力要区分。
| 对比项 | 立创·庐山派K230-CanMV开发板 | 立创·庐山派Lite-K230D-CanMV开发板 | 对快速上手的影响 |
|---|---|---|---|
| 核心性能 | K230 平台,CPU / KPU 核心能力与 K230D 基本一致 | K230D 平台,CPU / KPU 核心能力与 K230 基本一致 | 不要简单理解为 Lite-K230D 算力更弱,实际差异更多体现在内存容量、外设和引脚资源 |
| 内存 | 板卡使用 1GB 外置内存;K230 芯片支持外置 LPDDR3 / LPDDR4,最大支持2G内存 | K230D 内置 128MB LPDDR4 | 算力接近,但 Lite-K230D 内存更小,运行大模型或多模型时更容易受限制 |
| USB 资源 | K230 芯片 USB 资源更多,庐山派K230板载 USB-A HOST | K230D USB 资源更少,庐山派Lite-K230D无 USB HOST | 本章 Type-C 连接和运行例程流程一致,但 USB HOST 相关例程不能直接照搬到 Lite-K230D |
| ADC 资源 | K230 最多 6 路 ADC(实际庐山派只引出了4路) | K230D 最多 3 路 ADC(实际庐山派Lite也只引出了3路) | 后续 ADC 教程中要注意可用通道数量不同 |
| 封装与引脚 | K230 封装更大,引脚资源更充足 | K230D 封装更小,部分引脚没有引出 | 庐山派Lite-K230D 外接模块时更要注意 IO 复用和资源占用 |
| 音频与扩展 | 标准版 K230 有 3.5mm 耳机口,无板载风扇接口 | Lite-K230D 有 HT6872 功放和 PWM 风扇接口 | 音频、蜂鸣器、风扇等教程会按板卡硬件能力分别说明 |
NOTE
嘉楠官方问答中提到,K230D 主要是内置 128MB DDR,并且部分引脚没有引出;其他方面没有明显差别。参考:K230和K230D有哪些区别?
1.3 K230芯片简介
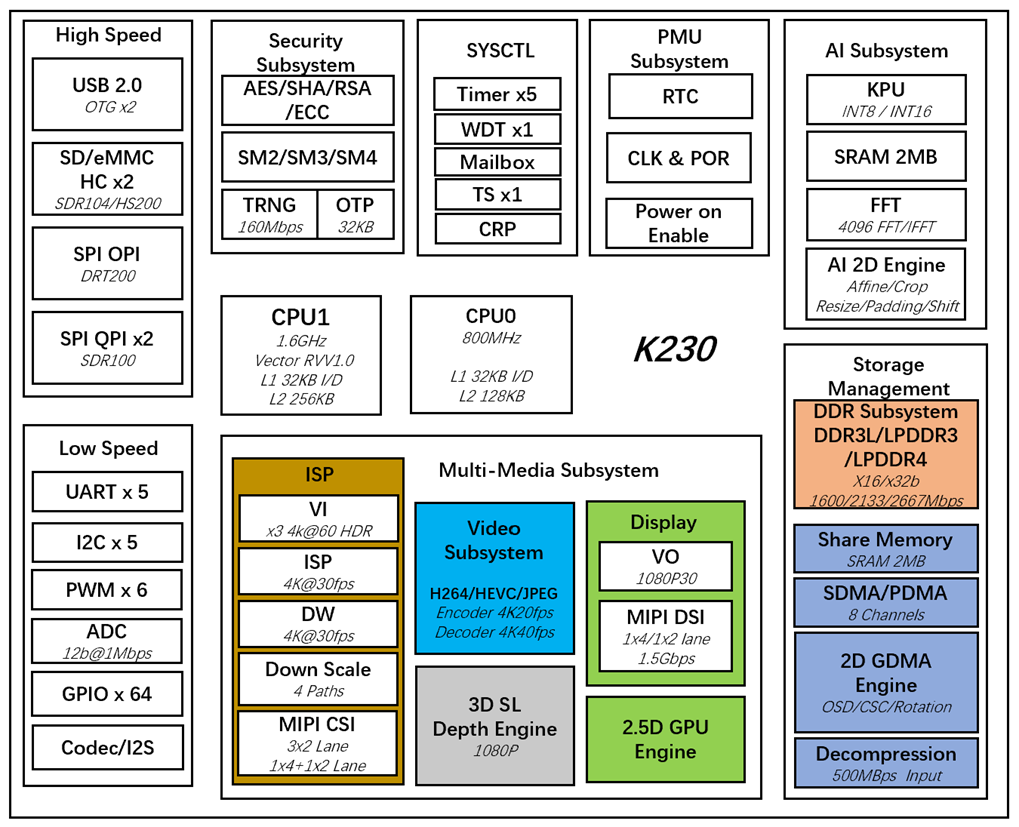
K230芯片集成了两颗RISC-V处理器核心,双核玄铁C908,12nm 制程工艺,主频高达1.6GHz,是全球首款支持RISC-V Vector 1.0标准的商用SOC,配备第三代KPU处理单元,专为图像、视频、音频处理和AI加速设计,提供强劲的本地AI推理能力。支持三路MIPI CSI视频输入,最大分辨率可达4K。K230支持常见的AI计算框架如TensorFlow和PyTorch。下面是该处理器的框架图:
二 开发前准备
| 序号 | 名称 | 数量 | 说明 |
|---|---|---|---|
| 1 | 立创·庐山派K230-CanMV开发板 或 立创·庐山派Lite-K230D-CanMV开发板 | 1片 | 两款开发板均适用本章,固件需要分别选择对应版本 |
| 2 | GC2093摄像头 | 1块 | 庐山派系列的标准套件都会提供 |
| 3 | TF 卡(2GB 以上,Class 10 等级及以上) | 1片 | 建议使用质量稳定的 TF 卡,4GB/8GB 都可以 |
| 4 | Type-C 数据线 | 1条 | 用于给开发板供电并连接电脑 |
| 5 | 电脑 | 1台 | 支持 Windows、macOS 或 Linux;使用网页版时需要 Chrome、Edge 或其他支持 Web Serial API 的 Chromium 内核浏览器 |
TIP
标准版 立创·庐山派K230-CanMV开发板 和 立创·庐山派Lite-K230D-CanMV开发板 都可以按照本章流程完成快速上手。摄像头型号以实际套件为准。
TF 卡建议优先选择质量稳定、速度达标的品牌卡。我们目前测试常用的是立创商城的 MK(米客方德)8GB TF 卡(SDSDQAB-008G-MK),购买链接:https://item.szlcsc.com/mro/58293428.html
本章只是快速上手,4GB 容量通常已经够用。如果后续要保存较多图片、视频或模型文件,可以再选择更大容量的 TF 卡。
2.1 选择 CanMV 开发环境
庐山派目前推荐使用下面两种 CanMV 开发环境。两者都支持立创·庐山派K230-CanMV开发板和立创·庐山派Lite-K230D-CanMV开发板,都可以完成脚本编辑、开发板连接、程序运行、终端输出、图像预览和设备文件管理。
| 推荐顺序 | 开发环境 | 适用场景 | 主要特点 |
|---|---|---|---|
| 第一推荐 | Visual Studio Code + CanMV 扩展 | 长期开发、正式项目、需要完善代码提示与工程管理 | 嘉楠官方推荐;示例和 MicroPython stubs 可与固件匹配;Pylance 提供代码补全和类型提示 |
| 第二推荐 | 立创开发板 CanMV IDE Web | 第一次体验、临时调试、课堂教学、换电脑快速使用 | 打开网页即可使用;支持 AI 助手、浏览器内文件管理和固件烧录 |
如何选择?
如果各位准备长期学习或开发项目,优先选择 Visual Studio Code + CanMV 扩展。如果暂时不想安装软件,或者需要快速验证开发板,可以选择立创开发板部门制作的 CanMV IDE Web。两套环境运行的都是 CanMV MicroPython 脚本,后续可以随时切换。
IMPORTANT
同一时间只能让一个开发环境占用开发板串口。切换 Visual Studio Code、CanMV IDE Web 或串口工具前,请先在当前工具中断开连接并关闭可能占用串口的页面或软件。
2.2 第一推荐:安装 Visual Studio Code 和 CanMV 扩展
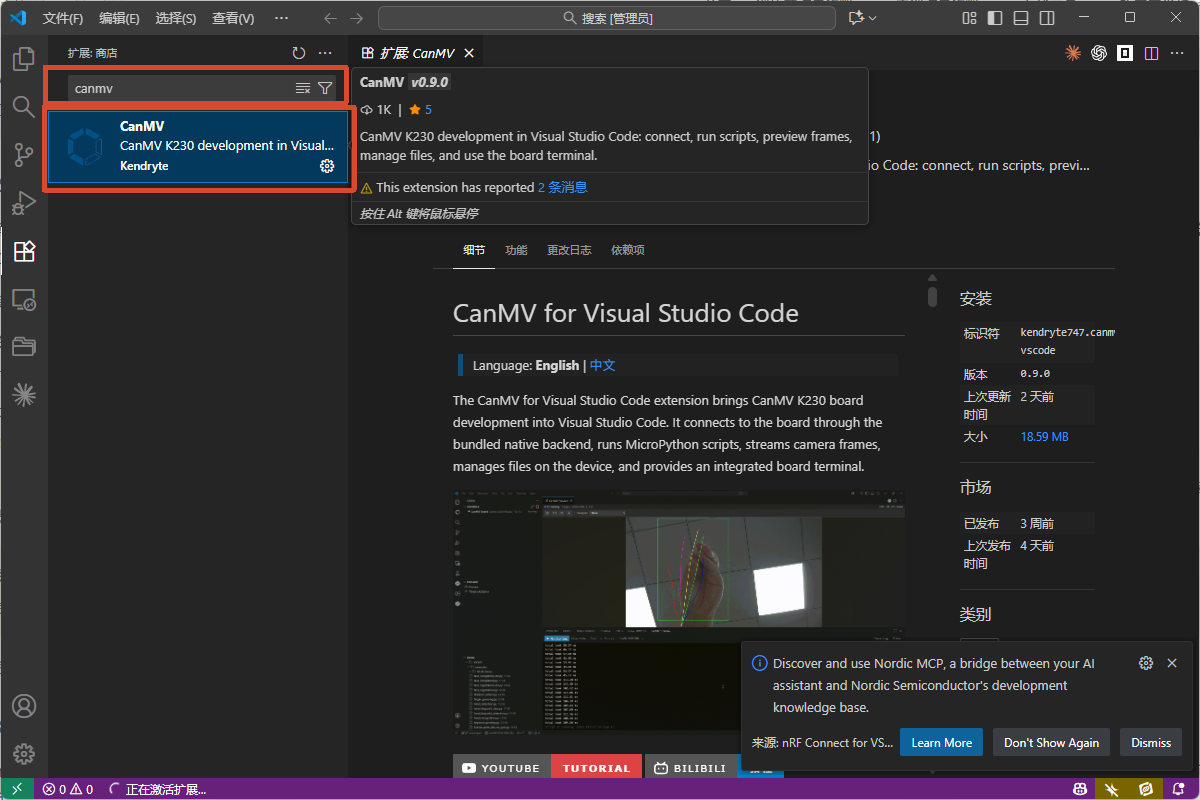
嘉楠官方推荐使用 CanMV for Visual Studio Code 扩展进行 CanMV K230 开发。它把开发板连接、MicroPython 脚本运行、终端输出、图像预览、设备文件管理和示例浏览等功能集成到了 Visual Studio Code 中。
安装步骤如下:
- 安装 Visual Studio Code
1.90.0或更高版本。 - 打开 Visual Studio Code 左侧的“扩展”视图,搜索
CanMV。 - 找到 CanMV 扩展后点击“安装”。扩展依赖的 Pylance 会自动安装,用于 Python 代码补全和类型提示。
- 如果使用离线 VSIX 安装包,可以打开命令面板,运行
Extensions: Install from VSIX...,然后选择对应的 VSIX 文件。
关闭可能占用串口的软件
使用 CanMV 扩展连接开发板前,请关闭其他可能占用开发板串口的软件。特别是从旧工具迁移过来的用户,不要让两个开发工具同时连接同一个串口,否则 CanMV 扩展可能无法连接开发板。
更完整的功能和迁移说明请参考嘉楠官方文档:使用 CanMV Visual Studio Code 扩展。
2.3 第二推荐:打开立创开发板 CanMV IDE Web
CanMV IDE Web 是立创开发板部门制作并部署在立创开发板 Wiki 服务器上的网页版开发环境,不需要安装桌面软件,使用支持网页串口(Web Serial API)的浏览器打开即可使用。
使用前请确认:
- 使用最新版 Chrome、Edge 或其他支持 Web Serial API 的 Chromium 内核浏览器,建议版本不低于
86。 - 使用
https://地址访问在线 IDE;Firefox 和 Safari 目前不支持 Web Serial API,无法连接开发板。 - 正常运行脚本时,庐山派使用 USB CDC 虚拟串口。Windows 10/11 通常可以直接识别为“USB 串行设备(COMx)”,不需要安装 CH340 等串口驱动。
在线 IDE 入口:https://wiki.lckfb.com/storage/html/canmv-web-ide/
网页版还提供 AI 助手、PWA 桌面安装、浏览器内固件烧录等功能。完整说明请阅读《CanMV IDE Web 在线使用教程》。
网页运行免装串口驱动,不等于网页烧录始终免驱动
开发板正常启动后,通过网页串口连接和运行脚本时,Windows 10/11 通常无需额外驱动;如果使用网页 IDE 的固件烧录功能,让开发板进入 BootROM 模式后,Windows 首次使用仍可能需要通过 Zadig 为 K230 USB Boot Device 安装 WinUSB 驱动。
2.4 先说清楚:烧录固件和运行脚本不是一回事
庐山派使用的是 CanMV MicroPython 环境。MicroPython 是解释性语言,我们写的 .py 文件不是像 STM32 C 工程那样编译成固件再烧录进芯片,而是由开发板里的 MicroPython 解释器读取并执行。
所以这里先把说法统一一下:
| 操作 | 推荐叫法 | 说明 |
|---|---|---|
将 .img 固件镜像写入 TF 卡 | 烧录固件 / 写入固件镜像 | 这是把系统固件写入存储介质 |
在任一种 CanMV 开发环境中运行 .py 文件 | 运行脚本 / 执行程序 | 这是让 MicroPython 解释器执行脚本,不是烧录程序 |
将 .py 文件复制到开发板文件系统 | 拷贝脚本 / 保存脚本 | 只是文件传输,不是烧录 |
IMPORTANT
后面我们说【烧录】时,指的是把 .img 固件镜像写入 TF 卡;运行官方例程时,请准确理解为【运行脚本】或【执行程序】。
三 获取及烧录固件
3.1 获取固件
3.1.1 双板固件选择说明
两款开发板的快速上手流程一致,但固件镜像不能混用。下载固件时请先确认自己手上的板卡型号。
 这里的图片所展示的版本号是写本文时最新的,大家在实际使用时注意选择用最新的固件即可。
这里的图片所展示的版本号是写本文时最新的,大家在实际使用时注意选择用最新的固件即可。
| 开发板 | 固件选择要求 | 说明 |
|---|---|---|
| 立创·庐山派K230-CanMV开发板 | 选择 K230 LCKFB 对应的 CanMV MicroPython 固件 | 不要选择 Linux 镜像,也不要选择其他厂商板卡镜像 |
| 立创·庐山派Lite-K230D-CanMV开发板 | 选择 Lite-K230D LCKFB 对应的 CanMV MicroPython 固件 | 文件名中会体现 Lite / K230D 板型信息,以下载页实际名称为准 |
DANGER
固件镜像必须和开发板型号完全匹配。烧错固件可能导致系统无法启动,严重时可能造成硬件异常,请不要混烧其他板型或其他系统镜像。
固件获取链接
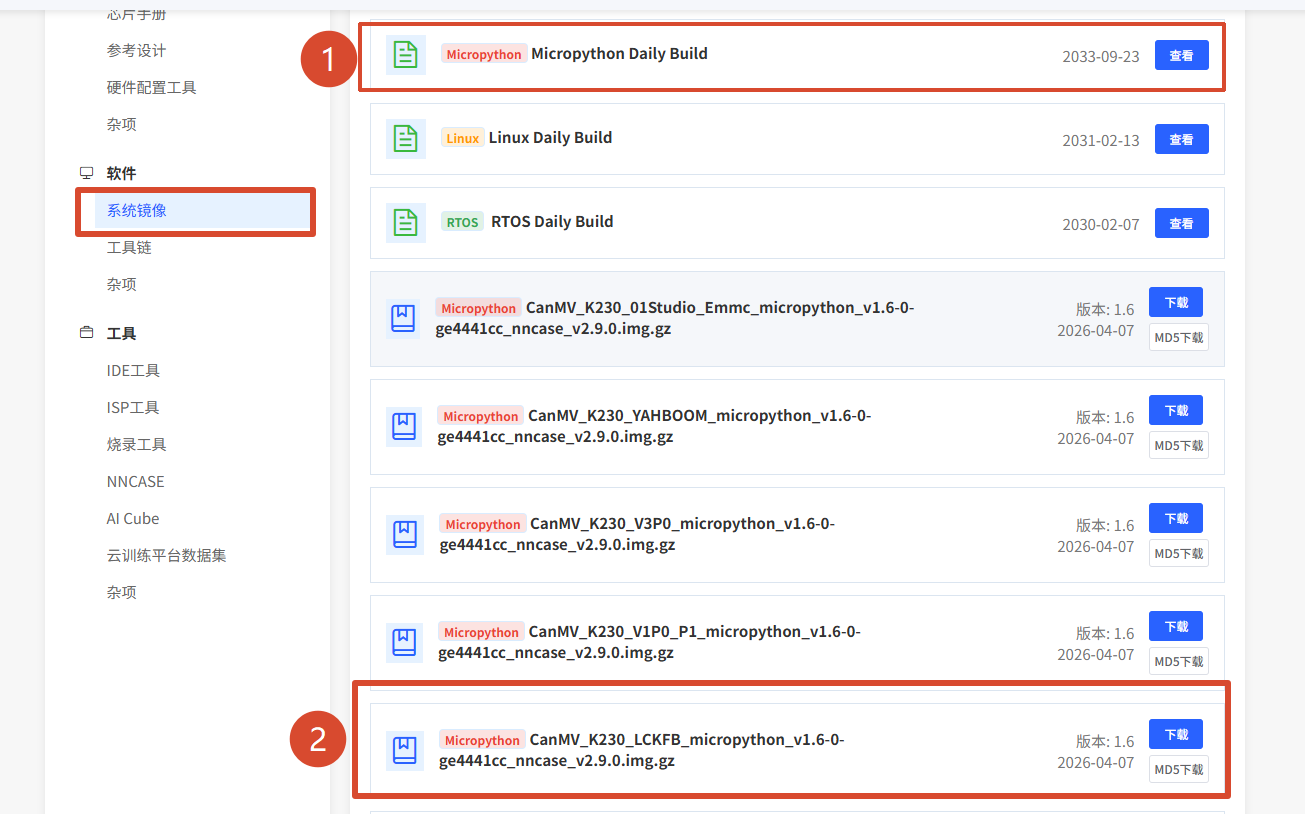
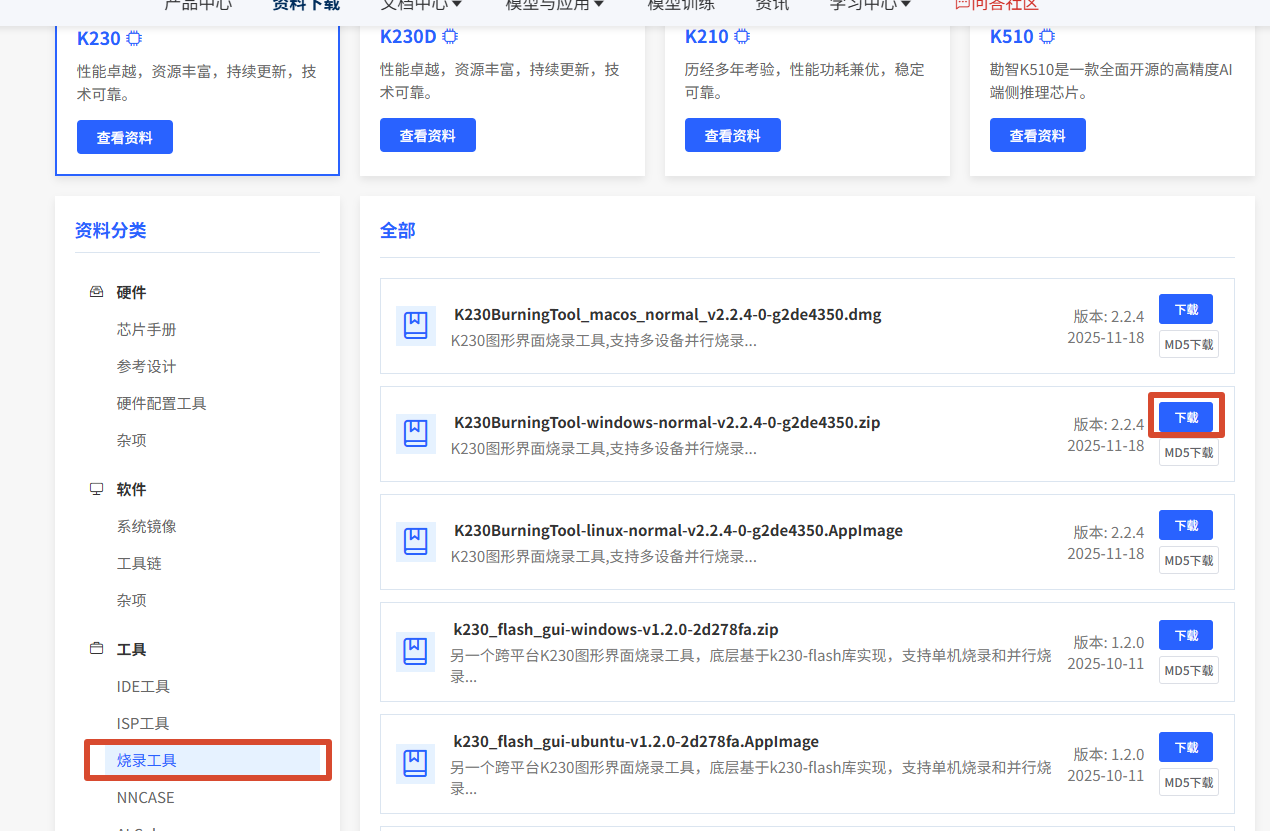
推荐从嘉楠开发者社区获取最新固件。进入页面后,在 资料下载 栏目中依次选择 K230 -> Images -> CanMV -> Micropython,然后下载与自己开发板匹配、并且文件名带有 LCKFB 标识的 CanMV MicroPython 固件。
下载时可以按下面的原则选择版本:
- Daily Build:每天自动构建,版本较新。如果你遇到 IDE 连接异常、例程运行失败、外设接口不兼容等问题,可以优先尝试更新到这个版本。
- 稳定版本:适合正常学习和课堂教学。如果当前教程可以顺利运行,使用稳定版本即可。下图标出来的是[立创·庐山派K230-CanMV开发板]的固件。
不建议从旧资料包或不明确来源下载固件。也不要下载 Linux 镜像、其他厂商开发板镜像,或者文件名中没有 LCKFB 标识的镜像。上图这里展示的是[立创·庐山派K230-CanMV开发板]的固件,写本文时,如果你用的是[立创·庐山派Lite-K230D-CanMV开发板],请选择这个开头的固件【CanMV_K230D_Lushanpi_Lite...】
IMPORTANT
固件下载完成后,在烧录前请再检查一次文件名和开发板型号是否匹配。不要因为都是 K230 系列,就把其他板型的镜像写入庐山派开发板。
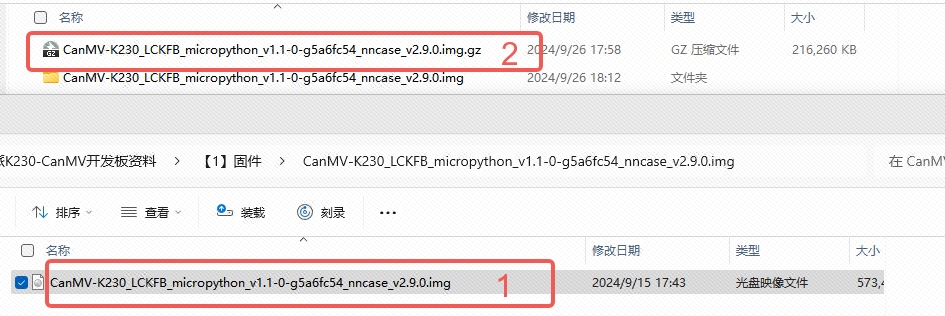
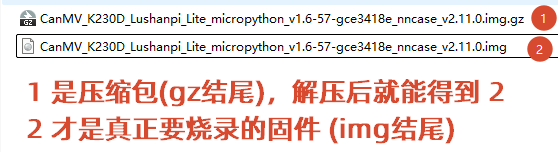
需要注意,下载下来的文件是压缩包,解压出来的 .img 文件才是固件镜像。
⚠️警告:
.gz 后缀结尾的是压缩包,.img 后缀结尾的才是固件镜像。往 TF 卡 中写入固件时,只能选择 .img 文件。如果直接写入 .gz 文件,开发板可能无法正常启动。
如下图所示,.gz 是压缩包,解压后得到的 .img 才是后续需要写入 TF 卡的固件镜像。
3.2 烧录固件
本节提供两种推荐的固件烧录方式。它们最终都是通过开发板的 Type-C 接口把 .img 固件镜像写入 TF 卡,选择其中一种即可,不需要重复操作。
| 推荐顺序 | 烧录方式 | 适用环境 | 推荐场景 |
|---|---|---|---|
| 第一推荐 | 嘉楠 K230BurningTool | Windows | 使用嘉楠官方桌面烧录工具,通过开发板 USB 接口稳定烧录 |
| 第二推荐 | 立创开发板 CanMV IDE Web | Chrome、Edge 等 Chromium 浏览器 | 不想安装烧录软件,希望直接在网页中完成烧录 |
IMPORTANT
无论使用哪种方式,写入固件都会覆盖 TF 卡中的原有数据。开始前请备份重要文件,并再次确认 .img 固件与当前开发板型号完全匹配。
3.2.1 第一推荐:使用嘉楠 K230BurningTool 烧录
首推使用嘉楠官方提供的 K230BurningTool,通过开发板的 Type-C 接口直接把固件写入 TF 卡。该工具的操作步骤明确,适合 Windows 用户首次烧录和后续更新固件。
为了方便演示,本小节以 立创·庐山派Lite-K230D-CanMV开发板 为例。标准版 立创·庐山派K230-CanMV开发板 也可以使用类似流程,只是下载固件时一定要选择对应板型的镜像。
DANGER
固件镜像只能写入对应的开发板。请务必选择与当前板型完全匹配的 CanMV MicroPython 镜像,不能把 K230、Lite-K230D、Linux 镜像或其他开发板镜像混用,否则可能导致系统无法启动,甚至造成硬件异常。
第一步:下载并解压固件
我们先进入 CanMV MicroPython 的每日构建目录,下载适合自己开发板的最新固件。每日构建链接为:canmv_k230_micropython daily_build。
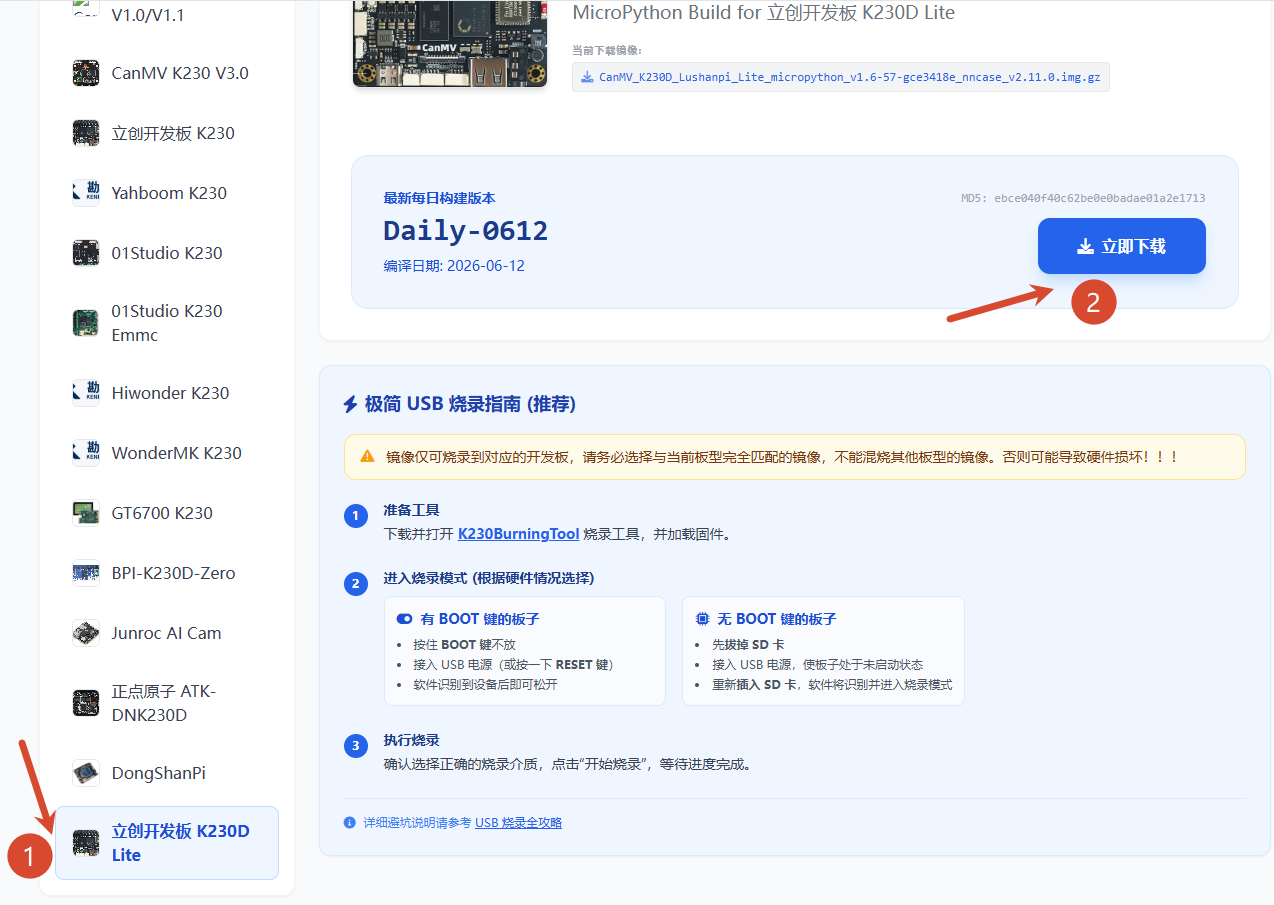
下载完成后,先把压缩包解压出来。后面烧录工具需要选择的是解压后的 .img 固件镜像,不是 .gz 压缩包。
解压后建议记一下固件所在目录,后面在 K230BurningTool 中选择镜像时需要找到这个文件。
第二步:让开发板进入 BOOT 模式
使用官方烧录工具时,需要先让开发板进入 BOOT 模式。这里按照下图的操作方式来做:
- 先用 Type-C 数据线把开发板连接到电脑。
- 按住开发板上的 BOOT 按键不要松开。
- 在保持按住 BOOT 的同时,短按一下 RESET 按键。
- 电脑识别到 K230 USB Boot Device 后,再松开 BOOT 按键。
下图是进入 BOOT 模式的操作示意:
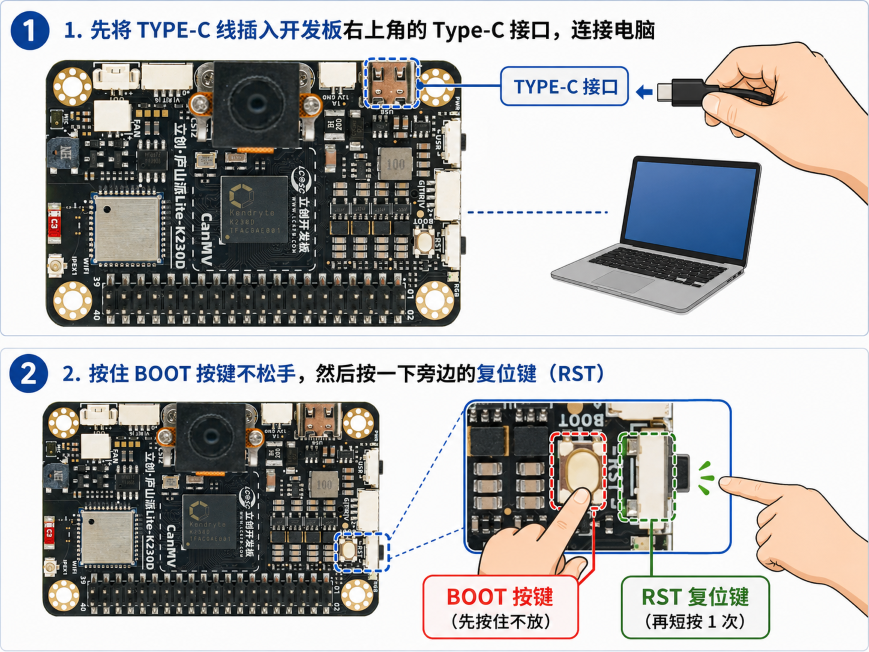
上图由 AI 生成,仅用于说明 BOOT 模式的操作顺序。庐山派K230 和 庐山派Lite-K230D 都有 BOOT 按键,操作思路一致,实际按键位置请以手上的开发板为准。
第三步:确认电脑是否识别到 BOOT 设备
开发板进入 BOOT 模式后,可以打开 Windows 设备管理器查看设备状态。如果没有安装驱动,通常会看到一个带感叹号的 K230 USB Boot Device。
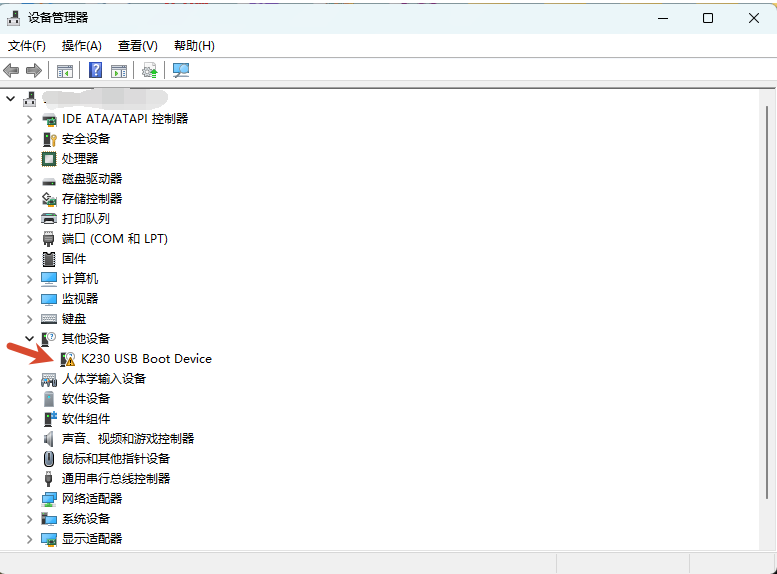
如果出现这种情况,需要先安装 WinUSB 驱动。推荐使用 Zadig 安装:
- 下载并打开 Zadig:https://zadig.akeo.ie/。
- 点击
Options->List All Devices,显示全部 USB 设备。 - 在设备列表中选择
K230 USB Boot Device。 - 在
Driver选项中选择WinUSB。 - 点击
Install Driver,等待安装完成。
如果不熟悉 Zadig,也可以参考这个操作视频:Zadig 驱动安装视频。
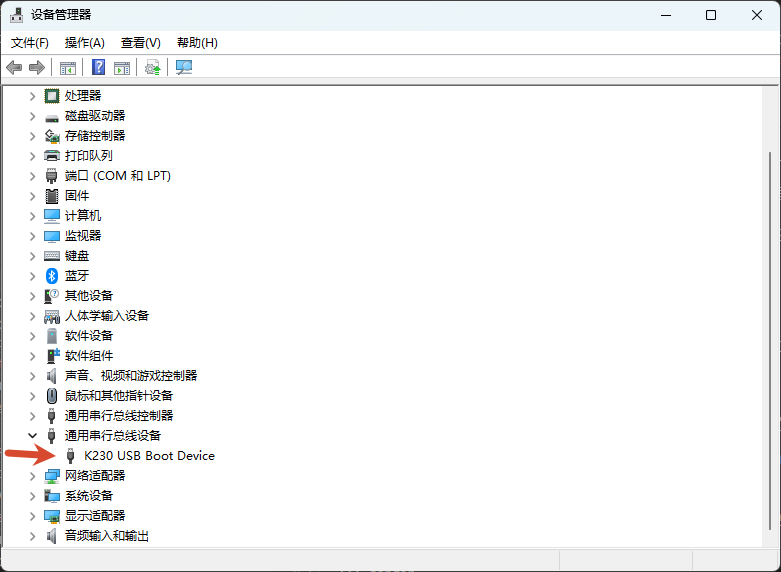
驱动安装完成后,再次查看设备管理器,应能看到没有感叹号的 K230 USB Boot Device。
第四步:下载并打开 K230BurningTool
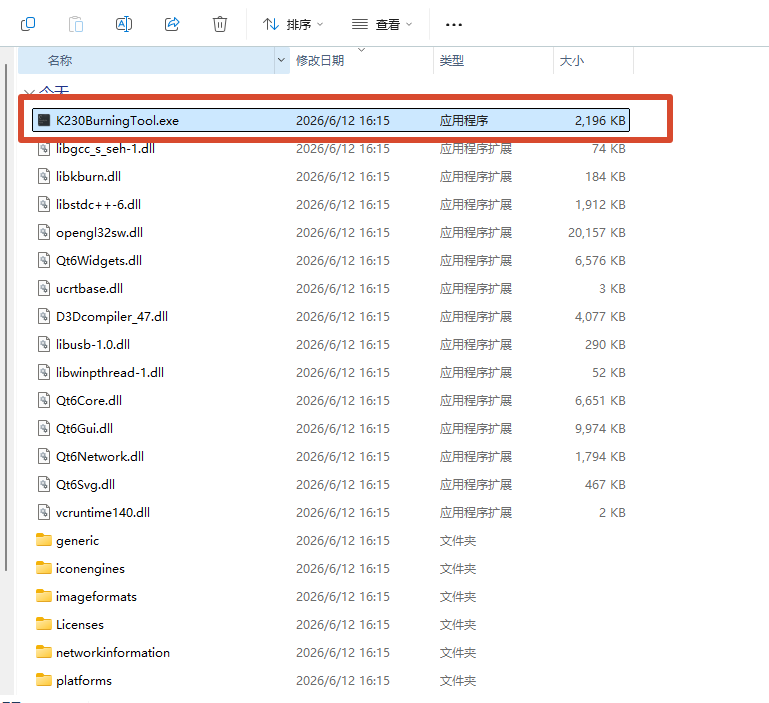
嘉楠官方提供了 K230BurningTool 烧录工具,可以用于写入 K230 系列固件。下载工具后先解压。
解压后找到 K230BurningTool.exe,双击打开。
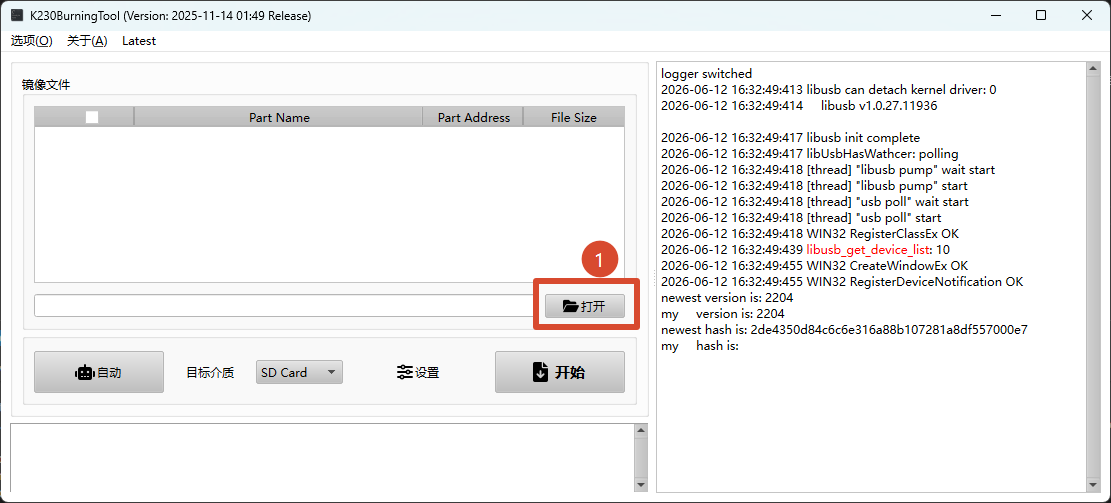
第五步:选择固件镜像
打开工具后,先点击固件路径相关按钮,选择前面已经解压出来的 .img 固件镜像。
在文件选择窗口中找到对应的固件镜像。这里一定要再次确认文件名和开发板型号匹配,例如标准版 K230 选择 K230 对应固件,Lite-K230D 选择 Lite-K230D 对应固件。
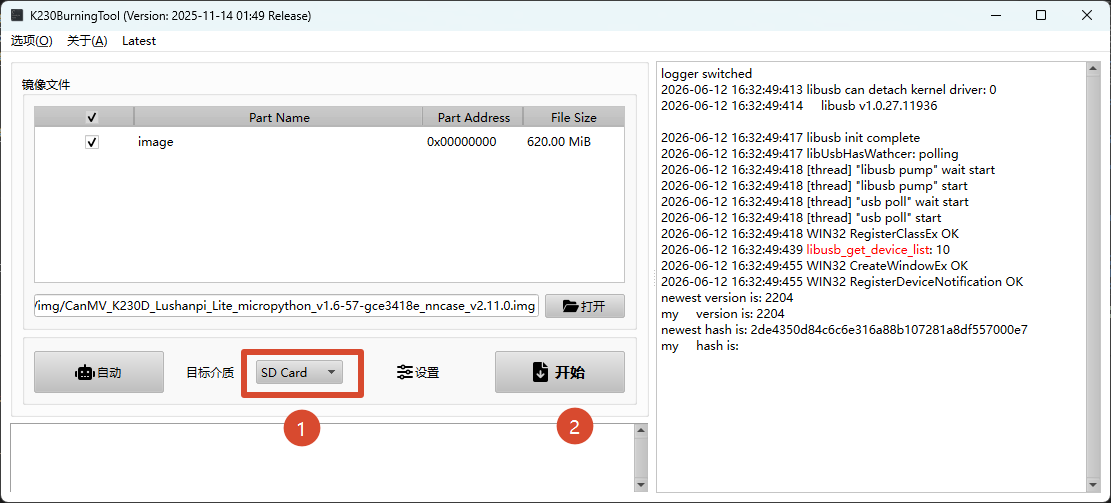
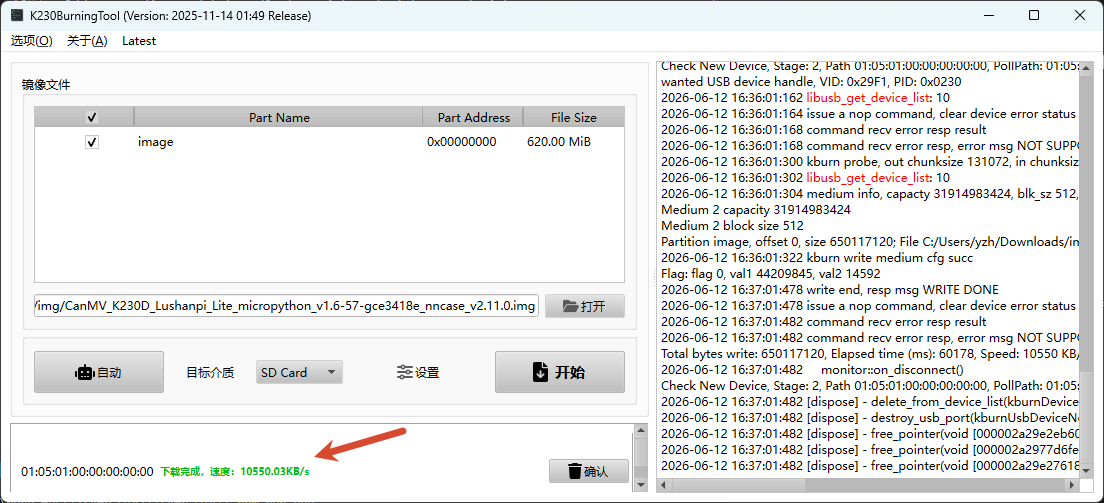
第六步:选择烧录介质并开始烧录
确认固件镜像无误后,把目标介质修改为 SD Card,然后点击右侧的“开始”按钮。烧录过程中不要断电,也不要拔掉 Type-C 数据线或 TF 卡。
等待进度条走到 100%,并提示下载完成后,就表示固件已经写入完成。此时可以断电重启开发板,进入后续启动和连接步骤。
如果工具识别不到设备,优先按下面顺序排查:
- Type-C 数据线是否支持数据传输,不要使用只能充电的数据线。
- 开发板是否确实进入 BOOT 模式。
- 设备管理器中是否能看到
K230 USB Boot Device。 - Zadig 驱动是否已经安装为
WinUSB。 - 固件镜像是否已经解压为
.img文件。
更详细的避坑说明可以参考:USB 烧录全攻略。
3.2.2 第二推荐:使用立创开发板 CanMV IDE Web 烧录
立创开发板部门制作的 CanMV IDE Web 也支持通过开发板的 Type-C 接口把固件写入 TF 卡。这种方式不需要安装 K230BurningTool,使用支持相关浏览器设备接口的 Chrome、Edge 等 Chromium 内核浏览器即可操作。
在线 IDE 入口:https://wiki.lckfb.com/storage/html/canmv-web-ide/
开始前请准备:
- 将 2GB 以上、Class 10 等级及以上的 TF 卡插入开发板。
- 使用支持数据传输的 Type-C 数据线连接开发板和电脑。
- 准备好已经解压的
.img固件镜像,不要直接选择.gz压缩包。 - Windows 用户首次使用时,如果
K230 USB Boot Device带有感叹号,需要先通过 Zadig 安装 WinUSB 驱动。
⚠️注意!固件必须与板型匹配
- 立创·庐山派K230-CanMV开发板:选择
CanMV_K230_LCKFB_*.img。 - 立创·庐山派Lite-K230D-CanMV开发板:选择
CanMV_K230D_Lushanpi_Lite_*.img。
网页 IDE 会根据所选板型和固件文件名进行检查,并在发现明显不匹配时给出红色警告。但文件名检查不能代替人工确认,点击开始烧录前仍需核对板型、文件名和镜像来源。
烧录步骤如下:
- 打开 CanMV IDE Web,点击“连接设备”旁边的“烧录固件”按钮。
- 按照向导确认 TF 卡和数据线已经连接,然后选择当前开发板型号。
- 点击“选择文件”,选择前面解压得到的
.img固件镜像。 - 按住开发板上的 BOOT 按键不要松开,短按一次 RESET,然后松开 BOOT,让开发板进入 BootROM 烧录模式。
- 点击“开始烧录”。浏览器弹出设备授权窗口后,选择
K230 USB Boot Device。 - 按页面提示等待烧录。烧录采用两阶段协议,中途开发板会重启并暂时断开;如果页面提示重新选择设备,请再次授权对应的 K230 设备继续烧录。
- 等待进度达到 100% 并出现烧录完成提示。开发板会自动重启,首次启动时还会初始化 TF 卡剩余空间,请继续等待 10~30 秒,不要立即断电或拔卡。
烧录过程中常见问题:
- 浏览器没有弹出设备窗口:点击页面中的“选择设备”,重新触发浏览器设备授权。
- 找不到设备或设备带感叹号:确认已经通过 BOOT + RESET 进入 BootROM,并检查 WinUSB 驱动。
- 卡在“等待阶段 2”:开发板重启后需要浏览器重新授权,按页面提示再次选择设备。
- 中途提示设备断开:两阶段烧录过程中设备会正常重启,不要关闭页面,按提示重新连接即可。
更完整的界面说明和排障步骤请参考《CanMV IDE Web 在线使用教程》。
四 启动开发板并连接开发环境
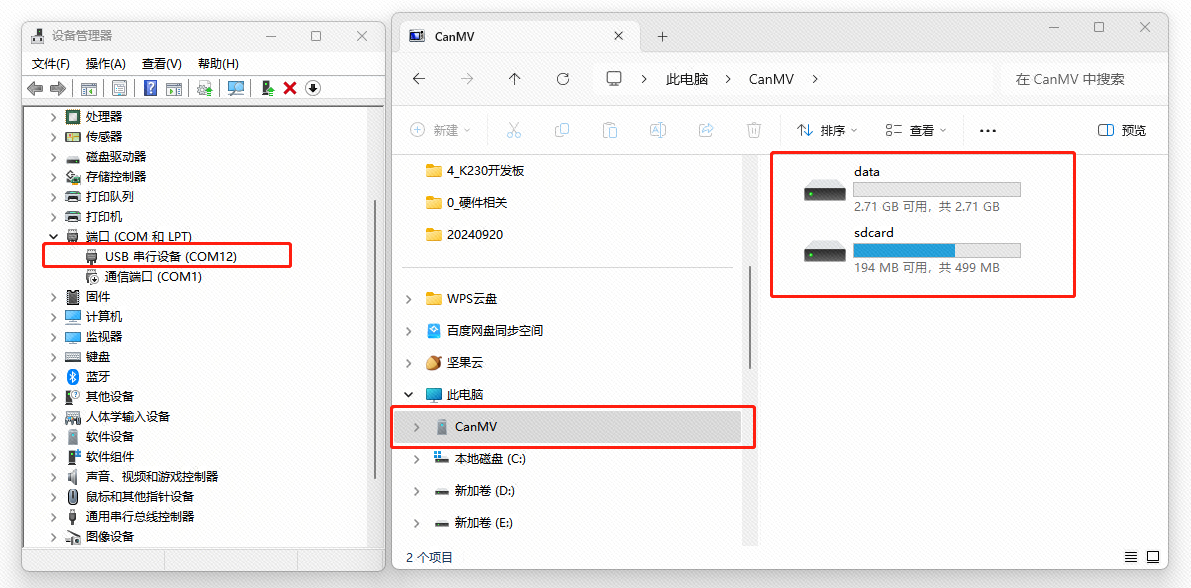
完成以上操作后,我们就可以给开发板上电了。请先确认 TF 卡已经插入开发板,然后用 Type-C 数据线将开发板连接到电脑。
如果正常启动,板子上的状态指示灯会点亮。稍微等待一会后,我们就可以在设备管理器中看到一个新的 USB 串行设备(COMx),同时电脑上也会出现一个 CanMV 设备,可以像访问 U 盘一样查看开发板中的文件。
⚠️注意:
在第一次上电时,庐山派开发板会自动将TF 卡除固件镜像外的剩余空间格式化为fat,并挂载在/data文件夹,格式化会占用一些时间并且会主动进行一次重启。后续上电时不会再进行这个操作,所以第一次上电会稍微慢一点。
开发板启动完成后,可以根据第二章的选择,通过下面任一条路线连接。两条路线完成的是同一件事,不需要同时操作。
4.1 路线一:使用 Visual Studio Code + CanMV 扩展连接
打开 Visual Studio Code,通过下面任一种方式连接:
- 按
Ctrl+Shift+P打开命令面板,运行CanMV: 连接开发板。 - 点击左侧活动栏中的 CanMV 图标,在
Controls视图中点击连接按钮。
CanMV 扩展默认会通过 USB VID/PID 1209:abd1 自动检测开发板。连接成功后,CanMV 活动栏会显示开发板状态,Device 视图会刷新设备文件,底部的 CanMV Terminal 面板也会显示开发板输出。
如果自动检测失败,请先在 Windows 设备管理器中确认是否出现 USB 串行设备(COMx),再打开 Visual Studio Code 设置,手动将 canmv.serialPath 配置为开发板对应的串口。Linux 常见路径为 /dev/ttyACM0,macOS 常见路径为 /dev/cu.usbmodem*;手动指定后,扩展会使用 canmv.baudRate 设置的波特率连接。
4.2 路线二:使用 CanMV IDE Web 连接
- 使用 Chrome 或 Edge 打开 CanMV IDE Web。
- 点击界面左上角的“连接设备”。
- 浏览器弹出串口选择框后,选择开发板对应的“USB 串行设备(COMx)”,再点击“连接”。每台电脑的 COM 号可能不同,请以实际识别结果为准。
- 等待在线 IDE 与开发板完成通信。连接成功后,终端会输出开发板信息,设备文件区也会开始显示可访问的目录。
浏览器串口授权
浏览器只有在用户主动点击“连接设备”后,才会显示串口授权窗口。网页不能绕过浏览器直接访问串口,这是 Web Serial API 的安全机制。不要在多个 CanMV IDE Web 标签页中同时连接同一块开发板。
如果串口选择框中没有设备,请确认浏览器支持 Web Serial API、网址以 https:// 开头,并关闭 Visual Studio Code、串口助手或其他可能占用串口的软件。
五 运行 CanMV 示例程序
写入固件后的 TF 卡中会带有嘉楠官方提供的例程,源码、模型文件、字体文件等都在 TF 卡中。开发板连接成功后,可以在 Visual Studio Code 的 Device 视图或 CanMV IDE Web 的“设备文件”区域中浏览 /sdcard、/data、/udisk(在K230上面插入了U盘才能用)) 等目录,也可以在电脑的 CanMV 设备中进入 sdcard 文件夹查看这些文件。
这里再次强调一下:接下来无论使用 Visual Studio Code 还是 CanMV IDE Web,执行 .py 文件都叫运行脚本,不是烧录程序。MicroPython 会读取并执行脚本,运行按钮只是把当前代码发送给开发板执行。
⚠️注意:
- Visual Studio Code 用户推荐使用 CanMV 扩展
Examples视图中与当前固件资源匹配的官方示例;网页版用户可以使用左侧“示例”中最新的庐山派示例,也可以使用固件自带例程。不要继续使用来源不明或版本过旧的旧 IDE 示例。 - 摄像头相关例程通常默认使用 CSI2,也就是开发板正面的立式 22P 摄像头座。运行摄像头例程前,请确认摄像头排线方向和接口位置。
- 如果从开发板文件系统获取例程,建议先将例程下载到电脑本地再运行,避免边读取设备文件边传输图像造成额外的 USB 传输压力。
- Lite-K230D 的内存比标准版 K230 小,运行 AI Demo 时建议优先选择较轻量的例程。若出现内存不足、启动慢或画面卡顿,可以先换基础摄像头/显示例程确认环境是否正常。具体能运行哪些AI模型,可以看这里的区别。
其例程examples,libs,res目录结构如表所示:
Details
sdcard:
├─examples
│ ├─01-Micropython-Basics
│ │ demo_crc16.py
│ │ demo_files.py
│ │ demo_fs_info.py
│ │ demo_globals.py
│ │ demo_json.py
│ │ demo_logging.py
│ │ demo_sha256.py
│ │ demo_sys_info.py
│ │ demo_thread.py
│ │ demo_time.py
│ │ demo_view_mem.py
│ │ demo_yield.py
│ │ demo_yield_task.py
│ │
│ ├─02-Media
│ │ acodec.py
│ │ audio.py
│ │ mp4muxer.py
│ │ rtsp_server.py
│ │ video_decoder.py
│ │ video_encoder.py
│ │ video_player.py
│ │
│ ├─03-Machine
│ │ ├─adc
│ │ │ adc.py
│ │ │
│ │ ├─fft
│ │ │ fft.py
│ │ │
│ │ ├─fpioa
│ │ │ fpioa.py
│ │ │
│ │ ├─i2c
│ │ │ i2c_master.py
│ │ │ i2c_slave.py
│ │ │
│ │ ├─pin
│ │ │ pin.py
│ │ │
│ │ ├─pwm
│ │ │ pwm.py
│ │ │
│ │ ├─rtc
│ │ │ rtc.py
│ │ │
│ │ ├─spi
│ │ │ spi.py
│ │ │
│ │ ├─timer
│ │ │ timer.py
│ │ │
│ │ ├─touch
│ │ │ touch.py
│ │ │
│ │ ├─uart
│ │ │ uart.py
│ │ │ uart1.py
│ │ │
│ │ └─wdt
│ │ wdt.py
│ │
│ ├─04-Cipher
│ │ cipher.py
│ │
│ ├─05-AI-Demo
│ │ dynamic_gesture.py
│ │ eye_gaze.py
│ │ face_detection.py
│ │ face_landmark.py
│ │ face_mesh.py
│ │ face_parse.py
│ │ face_pose.py
│ │ face_recognition.py
│ │ face_registration.py
│ │ falldown_detect.py
│ │ finger_guessing.py
│ │ hand_detection.py
│ │ hand_keypoint_class.py
│ │ hand_keypoint_detection.py
│ │ hand_recognition.py
│ │ keyword_spotting.py
│ │ licence_det.py
│ │ licence_det_rec.py
│ │ nanotracker.py
│ │ object_detect_yolov8n.py
│ │ ocr_det.py
│ │ ocr_rec.py
│ │ person_detection.py
│ │ person_keypoint_detect.py
│ │ puzzle_game.py
│ │ segment_yolov8n.py
│ │ self_learning.py
│ │ space_resize.py
│ │ tts_zh.py
│ │
│ ├─06-Display
│ │ display_hdmi.py
│ │ display_lcd.py
│ │ display_virt.py
│ │
│ ├─07-April-Tags
│ │ find_apriltags.py
│ │ find_apriltags_3d_pose.py
│ │
│ ├─08-Codes
│ │ find_barcodes.py
│ │ find_datamatrices.py
│ │ find_qrcodes.py
│ │
│ ├─09-Color-Tracking
│ │ automatic_grayscale_color_tracking.py
│ │ automatic_rgb565_color_tracking.py
│ │ black_grayscale_line_following.py
│ │ image_histogram_info.py
│ │ image_statistics_info.py
│ │ multi_color_code_tracking.py
│ │ single_color_code_tracking.py
│ │
│ ├─10-Drawing
│ │ arrow_drawing.py
│ │ circle_drawing.py
│ │ cross_drawing.py
│ │ ellipse_drawing.py
│ │ flood_fill.py
│ │ image_drawing.py
│ │ image_drawing_advanced.py
│ │ image_drawing_alpha_blending_test.py
│ │ keypoints_drawing.py
│ │ line_drawing.py
│ │ rectangle_drawing.py
│ │ text_drawing.py
│ │
│ ├─11-Feature-Detection
│ │ edges.py
│ │ find_blobs.py
│ │ find_lines.py
│ │ find_rects.py
│ │ hog.py
│ │ lbp.py
│ │ linear_regression_fast.py
│ │
│ ├─12-Image-Filters
│ │ adaptive_histogram_equalization.py
│ │ blur_filter.py
│ │ color_binary_filter.py
│ │ color_light_removal.py
│ │ edge_filter.py
│ │ erode_and_dilate.py
│ │ gamma_correction.py
│ │ grayscale_bilateral_filter.py
│ │ grayscale_binary_filter.py
│ │ grayscale_light_removal.py
│ │ histogram_equalization.py
│ │ kernel_filters.py
│ │ lens_correction.py
│ │ linear_polar.py
│ │ log_polar.py
│ │ mean_adaptive_threshold_filter.py
│ │ mean_filter.py
│ │ median_adaptive_threshold_filter.py
│ │ median_filter.py
│ │ midpoint_adaptive_threshold_filter.py
│ │ midpoint_filter.py
│ │ mode_adaptive_threshold_filter.py
│ │ mode_filter.py
│ │ negative.py
│ │ perspective_and_rotation_correction.py
│ │ perspective_correction.py
│ │ rotation_correction.py
│ │ sharpen_filter.py
│ │ unsharp_filter.py
│ │ vflip_hmirror_transpose.py
│ │
│ ├─14-Socket
│ │ http_client.py
│ │ http_server.py
│ │ iperf3.py
│ │ network_lan.py
│ │ network_wlan_ap.py
│ │ network_wlan_sta.py
│ │ tcp_client.py
│ │ tcp_server.py
│ │ udp_clinet.py
│ │ udp_server.py
│ │
│ ├─15-LVGL
│ │ │ lvgl_demo.py
│ │ │ lvgl_touch_demo.py
│ │ │
│ │ └─data
│ │ ├─font
│ │ │ lv_font_simsun_16_cjk.fnt
│ │ │ montserrat-16.fnt
│ │ │
│ │ └─img
│ │ animimg001.png
│ │ animimg002.png
│ │ animimg003.png
│ │
│ ├─16-AI-Cube
│ │ ClassificationApp.py
│ │ DetectionApp.py
│ │ MultiLabelApp.py
│ │ OCR_Det.py
│ │ SegmentationApp.py
│ │ SelfLearningApp.py
│ │
│ ├─17-Sensor
│ │ camera_dual_bind_hdmi.py
│ │ camera_mirror_flip.py
│ │ camera_single_bind_hdmi.py
│ │ camera_single_bind_lcd.py
│ │ camera_single_show_hdmi.py
│ │ camera_single_show_lcd.py
│ │ camera_snapshot_and_save.py
│ │ camera_triple_bind_hdmi.py
│ │
│ ├─18-NNCase
│ │ │ ai2d+kpu.py
│ │ │ kpu.py
│ │ │
│ │ └─face_detection
│ │ face_detection_320.kmodel
│ │ face_detection_ai2d_input.bin
│ │ face_detection_ai2d_output.bin
│ │ prior_data_320.bin
│ │
│ ├─99-HelloWorld
│ │ helloworld.py
│ │
│ ├─ai_test_kmodel
│ │ embedding.kmodel
│ │ insect_det.kmodel
│ │ landscape_multilabel.kmodel
│ │ ocr_det_int16.kmodel
│ │ ocr_rec_int16.kmodel
│ │ ocular_seg.kmodel
│ │ veg_cls.kmodel
│ │
│ ├─ai_test_utils
│ │ 0.jpg
│ │ 1.jpg
│ │ 2.jpg
│ │ 3.jpg
│ │ 4.jpg
│ │ 5.jpg
│ │ 6.jpg
│ │ 7.jpg
│ │ 8.jpg
│ │ dict.txt
│ │
│ ├─kmodel
│ │ cropped_test127.kmodel
│ │ eye_gaze.kmodel
│ │ face_alignment.kmodel
│ │ face_alignment_post.kmodel
│ │ face_detection_320.kmodel
│ │ face_landmark.kmodel
│ │ face_parse.kmodel
│ │ face_pose.kmodel
│ │ face_recognition.kmodel
│ │ gesture.kmodel
│ │ handkp_det.kmodel
│ │ hand_det.kmodel
│ │ hand_reco.kmodel
│ │ hifigan.kmodel
│ │ kws.kmodel
│ │ licence_reco.kmodel
│ │ LPD_640.kmodel
│ │ nanotracker_head_calib_k230.kmodel
│ │ nanotrack_backbone_sim.kmodel
│ │ ocr_det_int16.kmodel
│ │ ocr_rec_int16.kmodel
│ │ person_detect_yolov5n.kmodel
│ │ recognition.kmodel
│ │ yolov5n-falldown.kmodel
│ │ yolov8n-pose.kmodel
│ │ yolov8n_320.kmodel
│ │ yolov8n_seg_320.kmodel
│ │ zh_fastspeech_1_f32.kmodel
│ │ zh_fastspeech_2.kmodel
│ │
│ └─utils
│ │ dict.txt
│ │ fist.bin
│ │ five.bin
│ │ phone_map.txt
│ │ pinyin.txt
│ │ prior_data_320.bin
│ │ shang.bin
│ │ shear.bin
│ │ small_pinyin.txt
│ │ wozai.wav
│ │ xia.bin
│ │ you.bin
│ │ zuo.bin
│ │
│ ├─db
│ │ readme.txt
│ │
│ └─db_img
│ id_1.jpg
│ id_2.png
│
├─libs
│ AI2D.py
│ AIBase.py
│ PipeLine.py
│ RtspSever.py
│
└─res
└─font
LICENSE.txt
readme.txt
SourceHanSansSC-Normal-Min.ttf5.1 获取与当前固件匹配的示例
5.1.1 Visual Studio Code + CanMV 扩展
CanMV 扩展会根据开发板固件的资源清单下载匹配的官方示例。连接开发板后,打开 CanMV 活动栏中的 Examples 视图;如果列表没有刷新,可以打开命令面板并运行 CanMV: 刷新示例。
从 Examples 视图打开示例时,扩展会把它作为可编辑的未保存文件打开,避免直接改坏本地示例缓存。也可以在 Device 视图中找到 /sdcard/examples 下的固件内置例程,将它下载到电脑本地后再打开。
5.1.2 CanMV IDE Web
网页版 IDE 左侧边栏提供“示例”入口,单击示例即可将代码载入编辑器。网页版内置示例仍在持续更新,优先选择明确标注支持庐山派 K230 / Lite-K230D 的最新示例。
如果需要使用固件自带例程,可以在左侧“设备文件”中打开 /sdcard/examples。最新版固件支持直接查看和编辑设备文件;如果无法获取设备文件,请先更新与当前板型匹配的 CanMV MicroPython 固件。

5.2 运行和停止 Python 脚本
这里以 examples/05-AI-Demo/object_detect_yolov8n.py 为例。具体目录和文件名可能随固件版本调整,请以开发环境中的示例列表或 /sdcard/examples 中的实际内容为准。
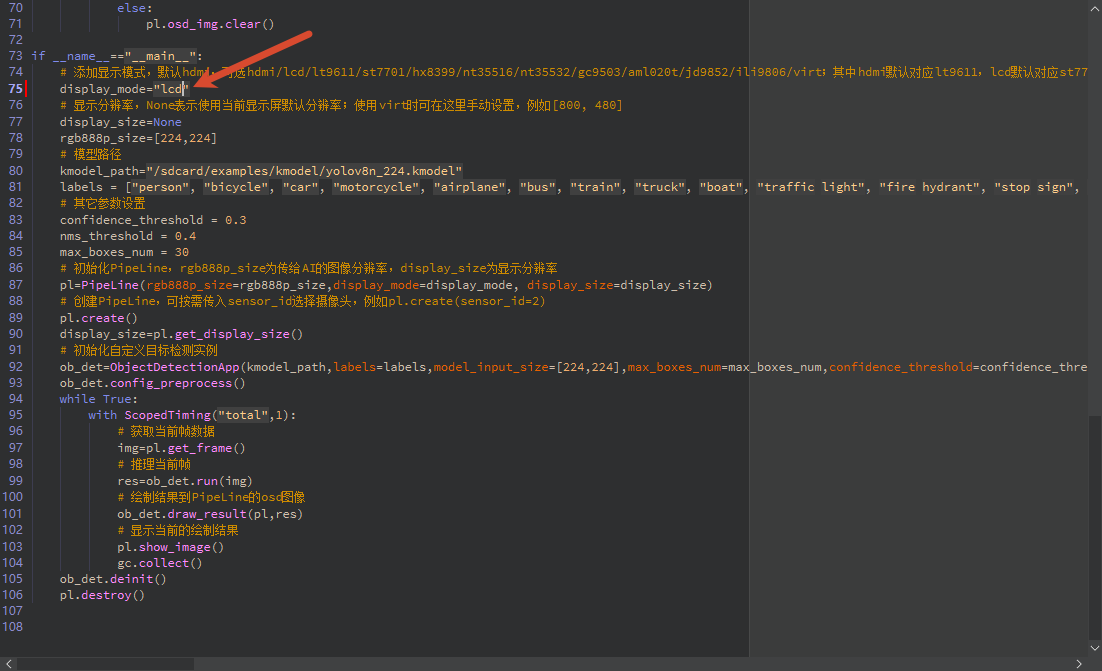
⚠️运行前必看:必须先确认并修改显示设备
请不要打开示例后直接点击运行。
嘉楠提供的部分官方示例,包括本节使用的 object_detect_yolov8n.py,默认将显示设备配置为 HDMI。庐山派开发板本身不能直接输出 HDMI,只有正确连接庐山派 HDMI 扩展板后,才能使用 HDMI 显示模式。
如果没有连接 HDMI 扩展板,运行前必须把示例中的显示设备或显示模式从 HDMI 修改为 LCD,否则通常会出现下面的错误:
RuntimeError: init panel failed出现这个错误一般是显示设备配置不匹配,不代表摄像头、固件或开发板已经损坏。
运行前请逐项确认:
- 使用板载 LCD:将代码中的显示设备或显示模式修改为
LCD。 - 使用 HDMI:必须先正确连接庐山派 HDMI 扩展板,并保持代码为 HDMI 显示模式。
- 确认实际显示设备与代码配置一致后,再点击运行。
5.2.1 Visual Studio Code + CanMV 扩展
- 在 Visual Studio Code 中打开要运行的
.py文件。 - 确认 CanMV 扩展已经连接开发板,并且开发板状态为就绪。
- 使用编辑器右上角的运行按钮,或者打开命令面板运行
CanMV: 运行当前 Python 脚本。 - 也可以在编辑器中右键,选择
CanMV: 在 K230 上运行当前文件。 - 在
CanMV Terminal中查看脚本输出,同时观察 LCD 画面或摄像头识别效果。 - 需要中断脚本时,运行
CanMV: 停止脚本,或者在CanMV Terminal中按Ctrl-C。
5.2.2 CanMV IDE Web
- 在编辑器中打开内置示例,或者直接编辑当前代码。
- 确认左上角已经显示开发板连接成功。
- 点击工具栏的“运行”按钮,或者按
F5。 - 在下方终端查看脚本输出,同时观察右侧预览画面或开发板 LCD。
- 需要中断脚本时,点击“停止”,或者按
Shift+F5。
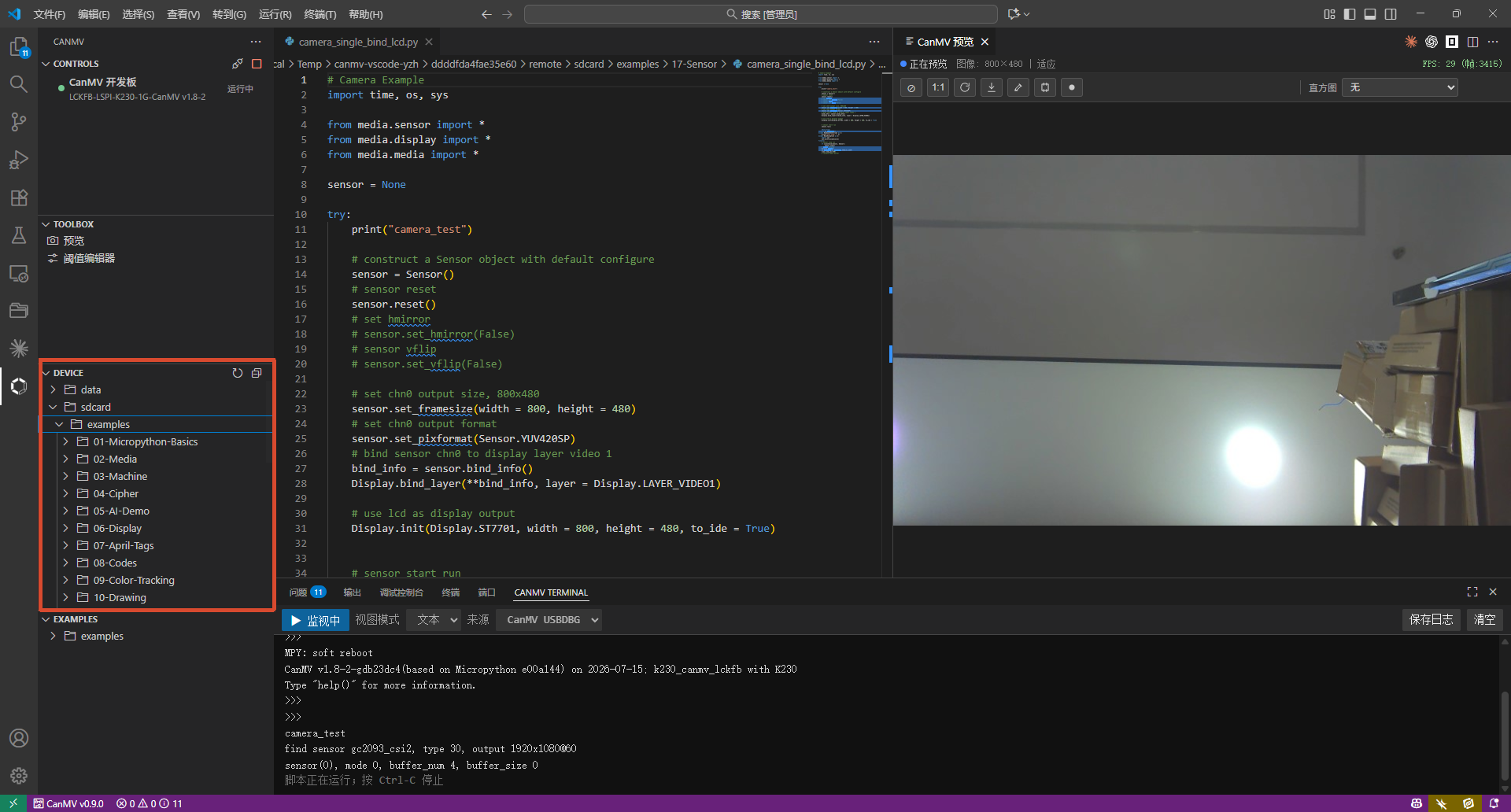
5.3 预览摄像头或图像输出
对于会向 IDE 帧缓冲输出图像的脚本,两套环境都可以实时预览。Visual Studio Code 用户可以从 CanMV 活动栏的 Toolbox 打开 Preview,也可以在命令面板运行 CanMV: 启用预览;CanMV IDE Web 用户在右侧切换到“预览”面板即可。
两套环境都支持下面的图像输出方式:
Display.init(..., to_ide=True):把显示输出同步到 IDE 帧缓冲。image.compress_for_ide():把指定图像发送到 IDE 帧缓冲。
Preview 除了实时画面,还支持适应窗口、原始尺寸、旋转、保存 PNG、像素 RGB 读取、FPS 显示、ROI 直方图和视频录制等功能。
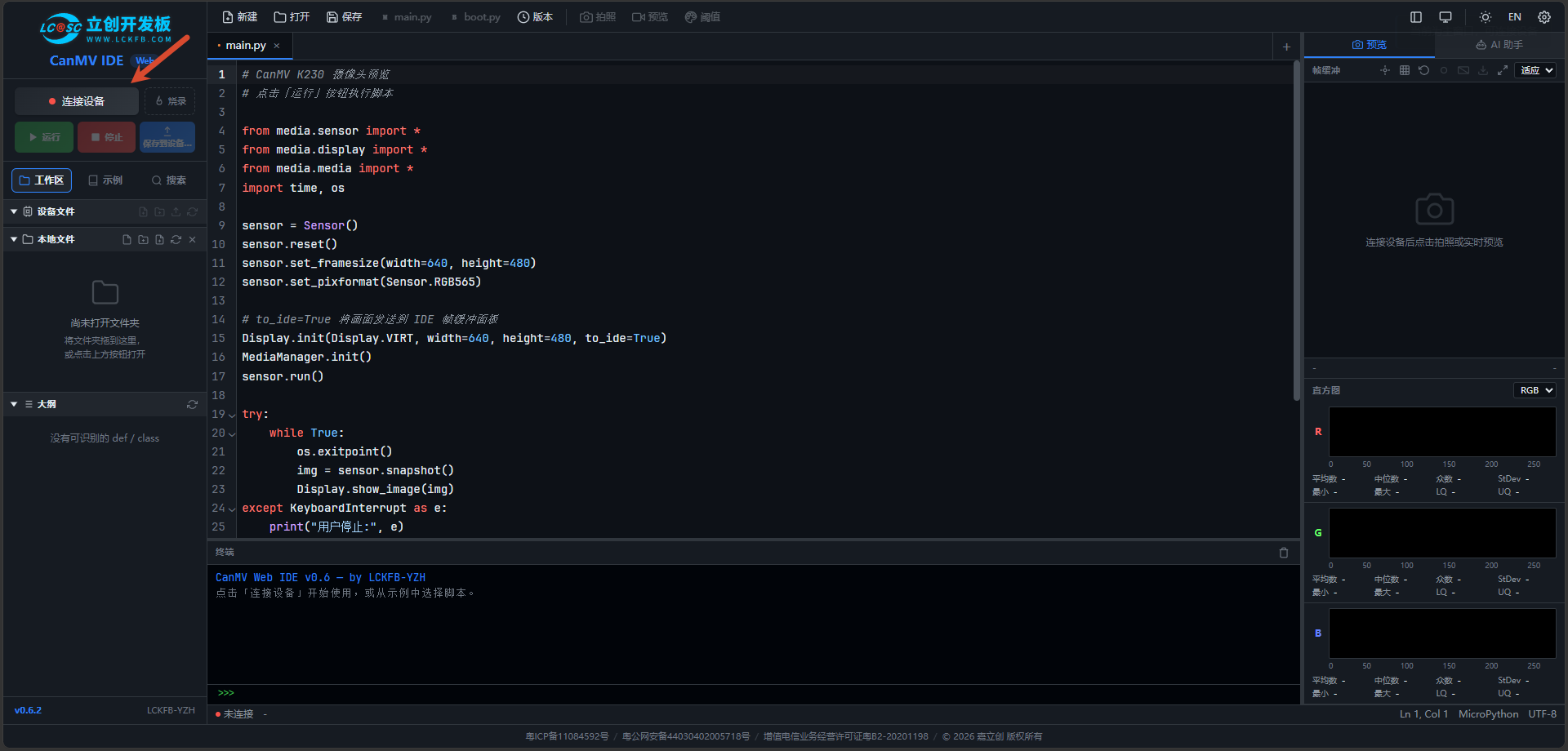
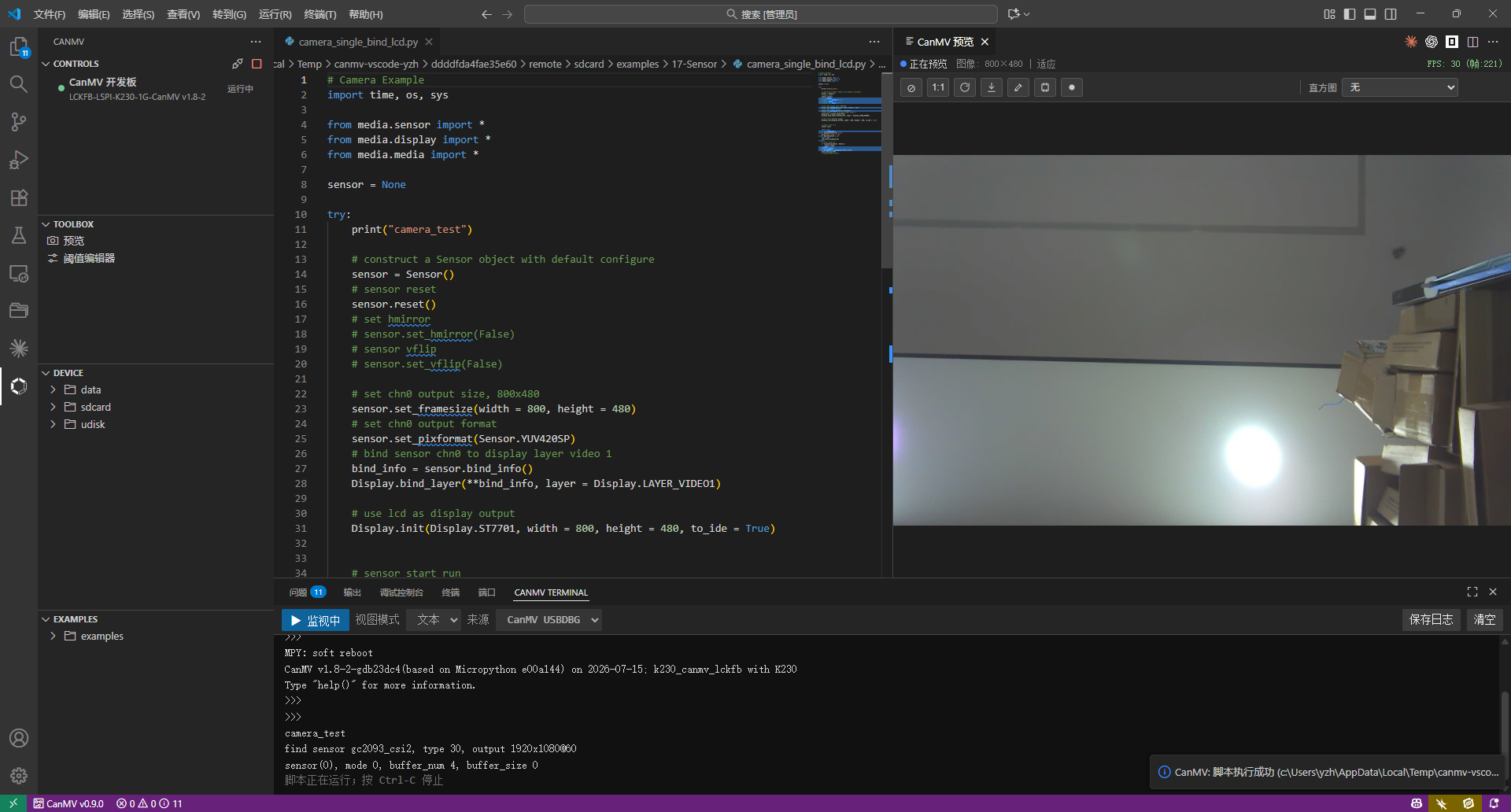
CanMV IDE Web 的右侧预览效果可参考下图。代码中除了 Display.init(..., to_ide=True),还要在循环中调用 Display.show_image(img) 或使用对应的 IDE 帧缓冲输出方法刷新图像。
5.4 管理开发板文件
- Visual Studio Code:在 CanMV 活动栏的
Device视图中管理/sdcard、/data和/udisk,可以上传、下载、新建、重命名、删除或编辑文件。 - CanMV IDE Web:在左侧“工作区”的“设备文件”中管理开发板文件;打开设备上的文件后,按
Ctrl+S可以直接保存回开发板,也可以拖入本地文件进行上传。
如果希望程序脱离电脑开机自动运行,可以将脚本保存为 /sdcard/main.py。详细方法请参考《让代码离线运行》。
六 常见问题
6.1 运行 .py 例程是不是烧录程序?
不是。运行 .py 例程是让 MicroPython 解释器执行脚本;只有把 .img 固件镜像写入 TF 卡时,才叫烧录固件。
6.2 K230 和 Lite-K230D 的固件可以混用吗?
不可以。两款开发板虽然都属于庐山派 CanMV K230 系列,但固件镜像不同。下载和写入固件前,一定要确认文件名和开发板型号匹配。
6.3 电脑没有出现 CanMV 设备怎么办?
优先检查 TF 卡是否已经正确写入 .img 固件镜像、开发板是否正常上电、Type-C 数据线是否支持数据传输。如果第一次启动时间较长,可以等待开发板完成 TF 卡剩余空间初始化后再观察。
6.4 CanMV 扩展无法连接开发板怎么办?
按下面的顺序排查:
- 确认 Type-C 数据线支持数据传输,并且开发板已经正常启动。
- 关闭串口工具和旧版 IDE 等可能占用开发板串口的软件。
- 在 Windows 设备管理器中确认是否出现 USB 串行设备(COMx)。
- 重新插拔 Type-C 数据线,然后再次运行
CanMV: 连接开发板。 - 如果仍然无法自动检测,在 Visual Studio Code 设置中把
canmv.serialPath手动配置为开发板对应的串口。
6.5 应该使用哪一套示例?
优先使用 CanMV 扩展 Examples 视图中与当前固件资源匹配的官方示例,或者使用固件内置例程。固件内置例程的源码、模型和字体等资源已经放在 TF 卡中,与当前固件的匹配度通常更高。不要直接套用来源不明或版本过旧的示例,否则容易遇到 API、资源路径或模型不匹配的问题。
6.6 CanMV Terminal 有输出,但 Preview 没有图像怎么办?
先确认脚本确实会向 IDE 帧缓冲输出图像,例如使用 Display.init(..., to_ide=True) 或调用 compress_for_ide()。然后从 Toolbox 打开 Preview,或者运行 CanMV: 启用预览。如果仍然没有图像,请查看 CanMV 输出通道中的预览与后端日志,并确认脚本没有因为显示初始化错误而提前退出。
6.7 Device 视图没有显示开发板文件怎么办?
先确认开发板状态为就绪,再打开命令面板运行 CanMV: 刷新资源管理器。如果仍然无法显示,建议更新到较新的 CanMV K230 固件;过旧固件可能不支持扩展所需的远程文件能力。
6.8 CanMV IDE Web 点击“连接设备”后找不到串口怎么办?
按下面的顺序排查:
- 确认使用 Chrome、Edge 或其他支持 Web Serial API 的 Chromium 内核浏览器,不要使用 Firefox 或 Safari。
- 确认访问的是
https://wiki.lckfb.com/storage/html/canmv-web-ide/,浏览器通常不允许普通非安全网页访问串口。 - 检查 Type-C 数据线是否支持数据传输,并在设备管理器中确认开发板显示为“USB 串行设备(COMx)”。
- 关闭 Visual Studio Code、串口助手、另一个 CanMV IDE Web 标签页等可能占用串口的工具,然后重新点击“连接设备”。
6.9 CanMV IDE Web 能否完全代替 Visual Studio Code?
对于快速体验、课堂教学、临时调试、运行示例、图像预览和设备文件管理,CanMV IDE Web 已经可以独立完成。对于长期项目、多文件工程、Git 管理、完善的代码分析和与固件匹配的 stubs,仍然优先推荐 Visual Studio Code + CanMV 扩展。两套环境运行相同的 CanMV MicroPython 脚本,可以根据使用场景随时切换。
6.10 CanMV IDE Web 烧录固件也不需要驱动吗?
不能一概而论。开发板正常启动后,网页 IDE 通过 USB CDC 虚拟串口连接,Windows 10/11 通常不需要额外驱动;进入 BootROM 使用网页烧录固件时,Windows 首次可能仍需通过 Zadig 为 K230 USB Boot Device 安装 WinUSB 驱动。完整烧录步骤请参考《CanMV IDE Web 在线使用教程》。
七 本章小结
本章我们完成了庐山派 K230 / Lite-K230D 的快速上手流程:准备开发板和配件、下载并写入对应固件、启动开发板,以及获取、运行和停止示例程序。开发环境方面,我们提供了两条完整路线:长期开发优先使用 Visual Studio Code + CanMV 扩展,快速体验和临时调试可以使用立创开发板部门制作的 CanMV IDE Web。两套环境都能连接开发板、运行 CanMV MicroPython 脚本、查看终端和图像预览、管理设备文件。