SG90舵机
模块来源
规格参数
驱动电压:3V~7.2V
驱动电流:
工作扭矩:1.6KG/CM
控制方式:PWM
转动角度:180度
使用说明
在购买时,需要分清楚你的舵机可以转180度,还是360度。360度的舵机是无法控制角度的,只可以控制旋转速度。
SG90的舵机转速不是很快,一般为0.22/60 度或0.18/60 度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。
硬件连接
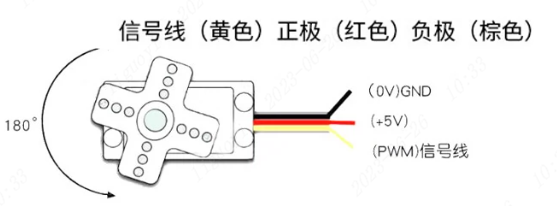
- 信号线(通常是橙色或黄色线)连接到开发板的9号PWM输出引脚。
- 电源线(红色线)连接到开发板的5V。
- 地线(棕色或黑色线)连接到开发板的GND。
使用方法
- 包含Servo库:首先,需要在Arduino IDE中包含Servo库。
- 定义Servo对象:然后,定义一个或多个Servo对象,每个对象代表一个舵机。
- 附加舵机到引脚:使用attach()函数,将舵机对象附加到控制信号线连接的引脚上。
- 控制舵机:使用write()函数将舵机旋转到指定角度(0到180度)。
c
#include <Servo.h>
Servo myservo; // 创建舵机对象来控制SG90
void setup() {
myservo.attach(9); // 将舵机的信号线连接到数字引脚9
}
void loop() {
for (int pos = 0; pos <= 180; pos += 1) {
myservo.write(pos); // 从0度转到180度
delay(15); // 舵机转到新位置需要一些时间
}
for (int pos = 180; pos >= 0; pos -= 1) {
myservo.write(pos); // 从180度回转到0度
delay(15); // 舵机转到新位置需要一些时间
}
}这个示例代码让舵机从0度慢慢转到180度,然后再慢慢回转到0度。delay(15);语句确保了舵机有足够的时间到达新的位置。