05、Linux中通用SPI设备驱动分析
参考资料:
- 内核驱动:
drivers\spi\spidev.c - 内核提供的测试程序:
tools\spi\spidev_fdx.c - 内核文档:
Documentation\spi\spidev
一、内核和设备树配置
通用 SPI 设备驱动在迅为提供的 Linux 内核中默认已经勾选了, 具体路径如下所示:
C
> Device Drivers
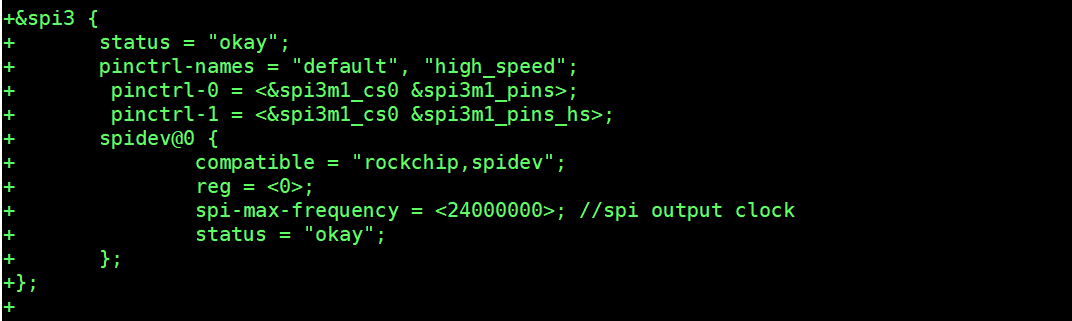
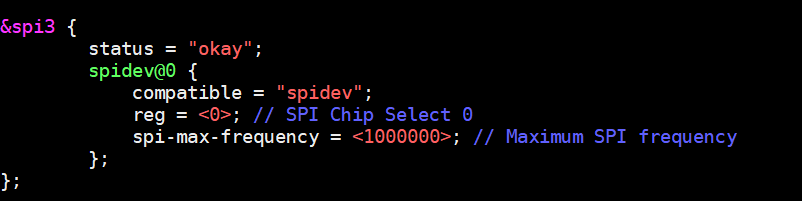
> SPI support除了内核支持之外, 还需要修改设备树, 由于之前已经使能了 SPI0, 所以这直接修改之前编写的 mcp2515 设备树节点, 具体设备树为 :
二、设备节点
开发板启动后,如果能看到类似 /dev/spidev3.0 的设备节点,说明系统对SPI硬件的配置是正确的。
这个设备名称的含义很简单:
- 前面的数字
3表示这是第4号SPI总线(总线编号从0开始算) - 后面的数字
0表示这条总线上第一个设备(设备编号同样从0开始)
举个例子:
/dev/spidev0.0就是第1号总线上的第1个设备/dev/spidev3.2就是第4号总线上的第3个设备
系统通过总线号区分不同的SPI控制器,而设备号则通过硬件的片选信号(CS)来指定具体连接的芯片。每个SPI总线最多可以连接多个设备,只要硬件提供了足够的片选引脚。
三、spidev驱动分析
使能CONFIG_SPI_SPIDEV,这样spidev驱动将会被编译,我们今天来看一下:
驱动流程图:
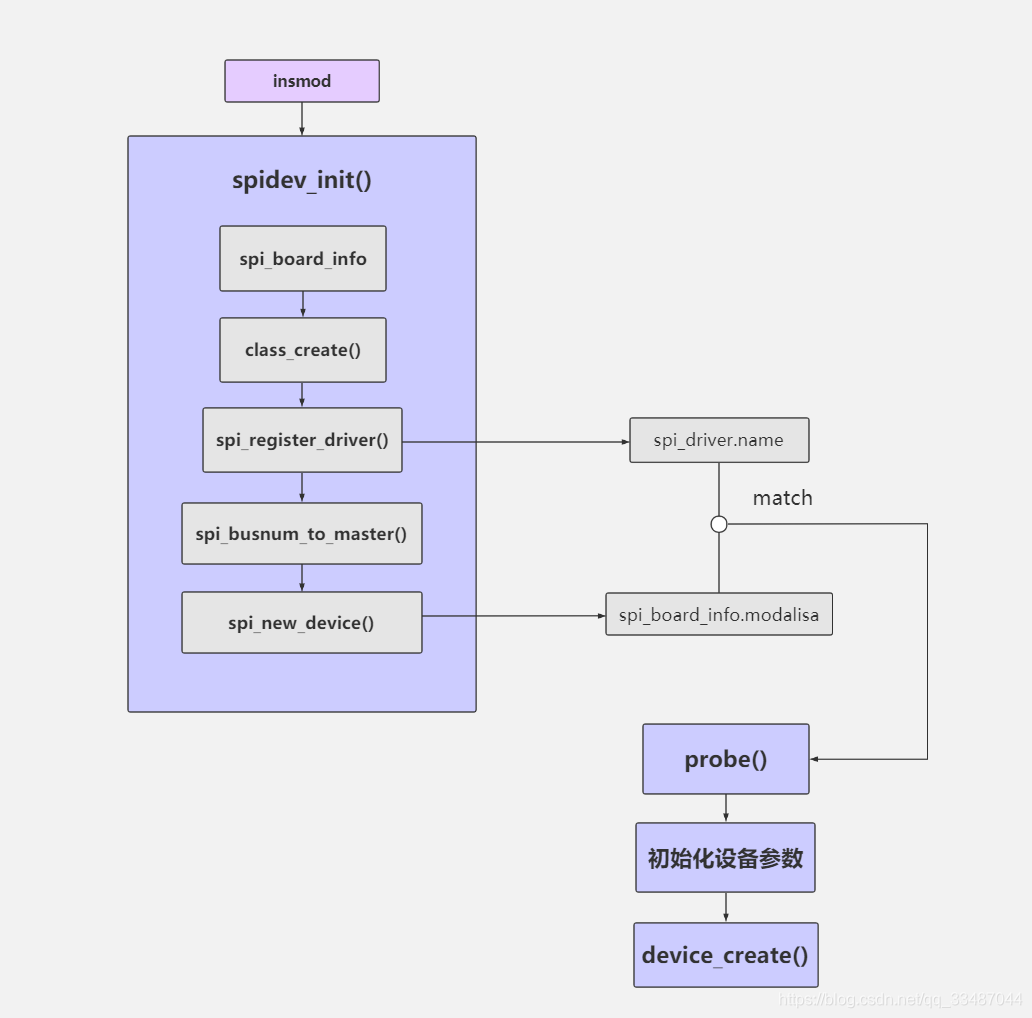
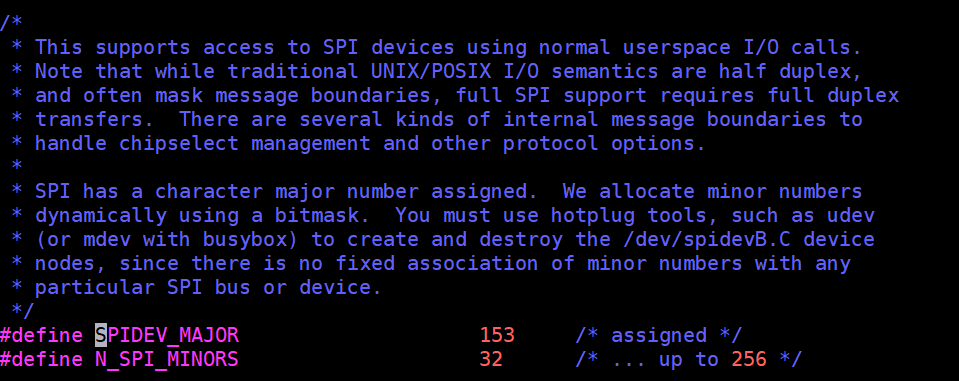
3.1、init
目录:spi/spidev.c
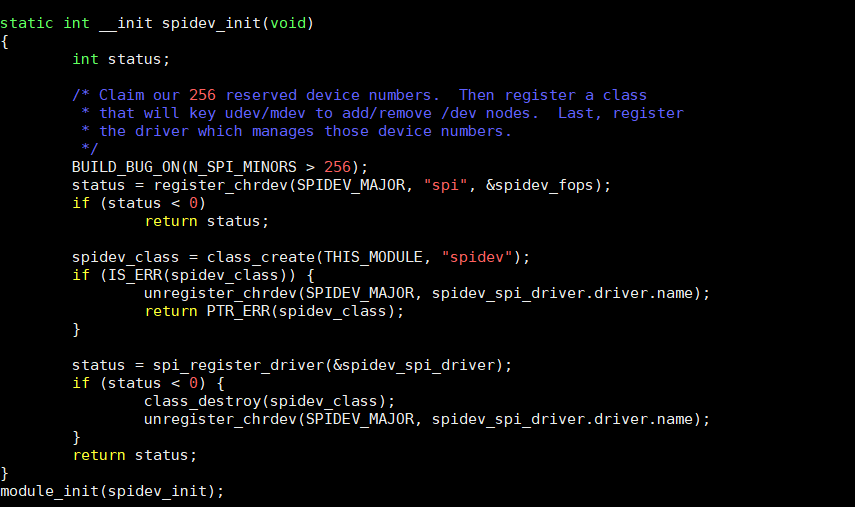
第一步操作集注册:
然后会注册:
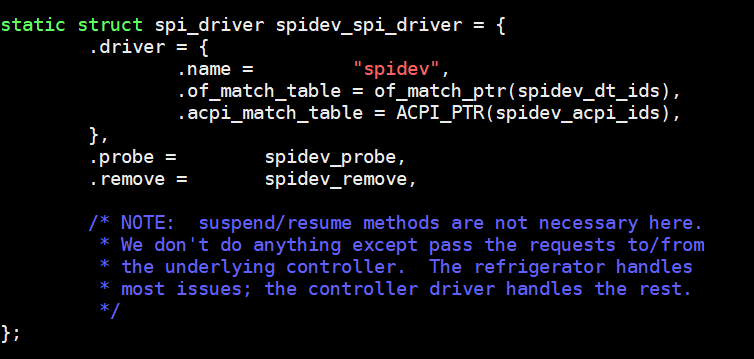
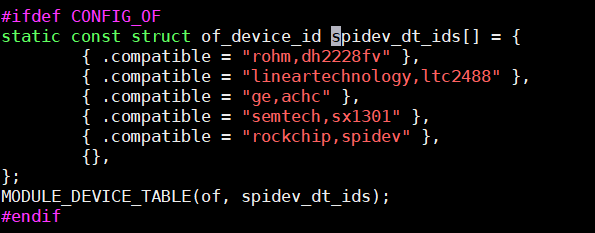
对应的device信息在设备树里面:
3.2、probe
当SPI设备被识别后,spidev_probe函数会执行以下步骤:
- 记录设备信息 创建一个数据容器(spidev_data结构体),专门用来保存当前SPI设备的相关信息。
- 保存到列表中 把这个数据容器存入一个列表里,方便后续查找。
- 分配唯一编号 为设备分配一个独立的编号。以后可以通过这个编号在列表里快速找到对应的数据容器。
- 生成设备文件 根据总线号(B)和设备序号(D),在
/dev目录下创建一个设备文件,文件名格式为spidevB.D。 (例如:总线0上的第1个设备,文件名就是spidev0.1)
整个过程相当于: 给新发现的SPI设备创建一个"身份档案",分配一个"身份证号",再生成一个用户可访问的设备文件。
C
static int spidev_probe(struct spi_device *spi)
{
struct spidev_data *spidev;
int status;
unsigned long minor;
/*
* spidev should never be referenced in DT without a specific
* compatible string, it is a Linux implementation thing
* rather than a description of the hardware.
*/
WARN(spi->dev.of_node &&
of_device_is_compatible(spi->dev.of_node, "spidev"),
"%pOF: buggy DT: spidev listed directly in DT\n", spi->dev.of_node);
spidev_probe_acpi(spi);
/* Allocate driver data */
spidev = kzalloc(sizeof(*spidev), GFP_KERNEL);
if (!spidev)
return -ENOMEM;
/* Initialize the driver data */
spidev->spi = spi;
spin_lock_init(&spidev->spi_lock);
mutex_init(&spidev->buf_lock);
INIT_LIST_HEAD(&spidev->device_entry);
/* If we can allocate a minor number, hook up this device.
* Reusing minors is fine so long as udev or mdev is working.
*/
mutex_lock(&device_list_lock);
minor = find_first_zero_bit(minors, N_SPI_MINORS);
if (minor < N_SPI_MINORS) {
struct device *dev;
//创建设备号
spidev->devt = MKDEV(SPIDEV_MAJOR, minor);
//创建设备
dev = device_create(spidev_class, &spi->dev, spidev->devt,
spidev, "spidev%d.%d",
spi->master->bus_num, spi->chip_select);
status = PTR_ERR_OR_ZERO(dev);
} else {
dev_dbg(&spi->dev, "no minor number available!\n");
status = -ENODEV;
}
if (status == 0) {
//设置位
set_bit(minor, minors);
//把spidev添加到device_list
list_add(&spidev->device_entry, &device_list);
}
mutex_unlock(&device_list_lock);
spidev->speed_hz = spi->max_speed_hz;
if (status == 0)
spi_set_drvdata(spi, spidev);
else
kfree(spidev);
return status;
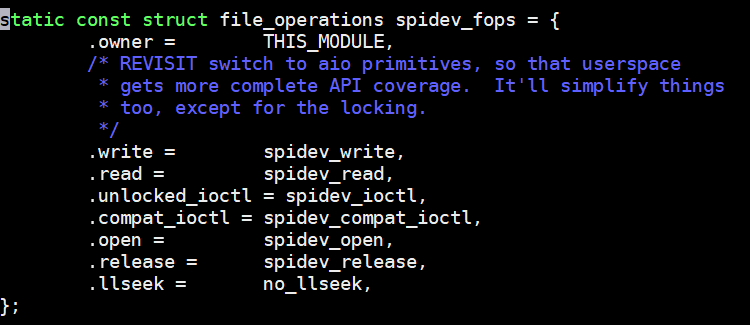
}3.3、spidev_fops
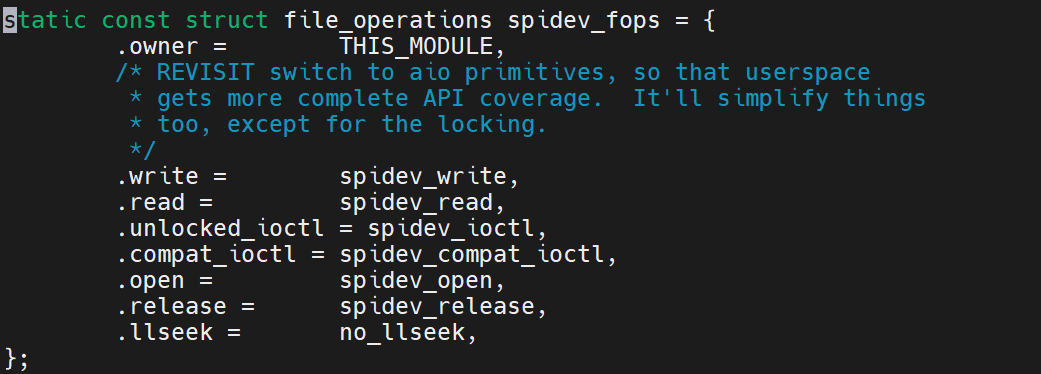
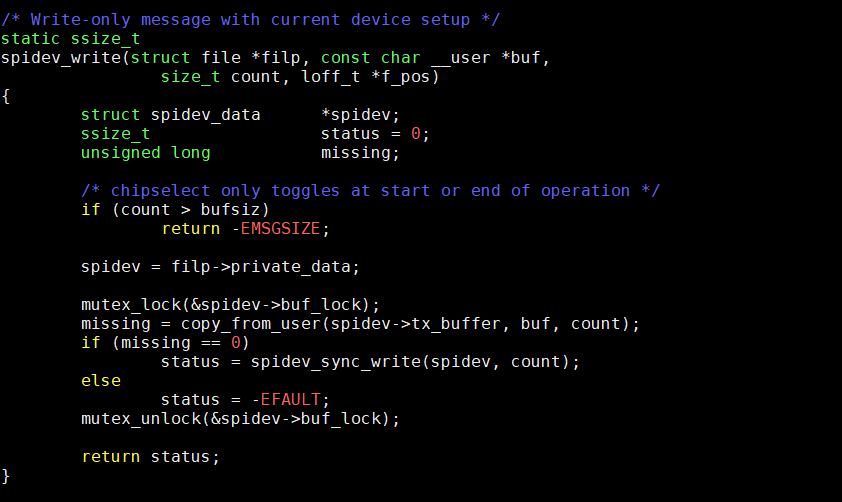
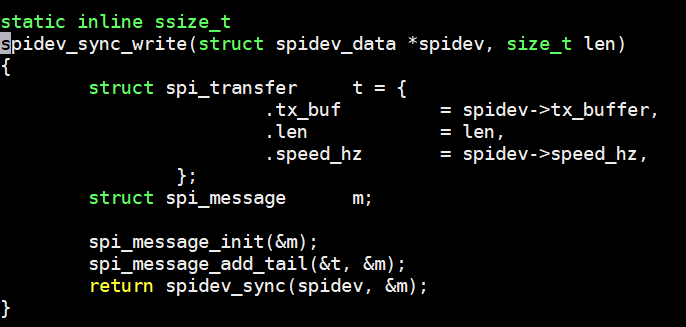
① spidev_write
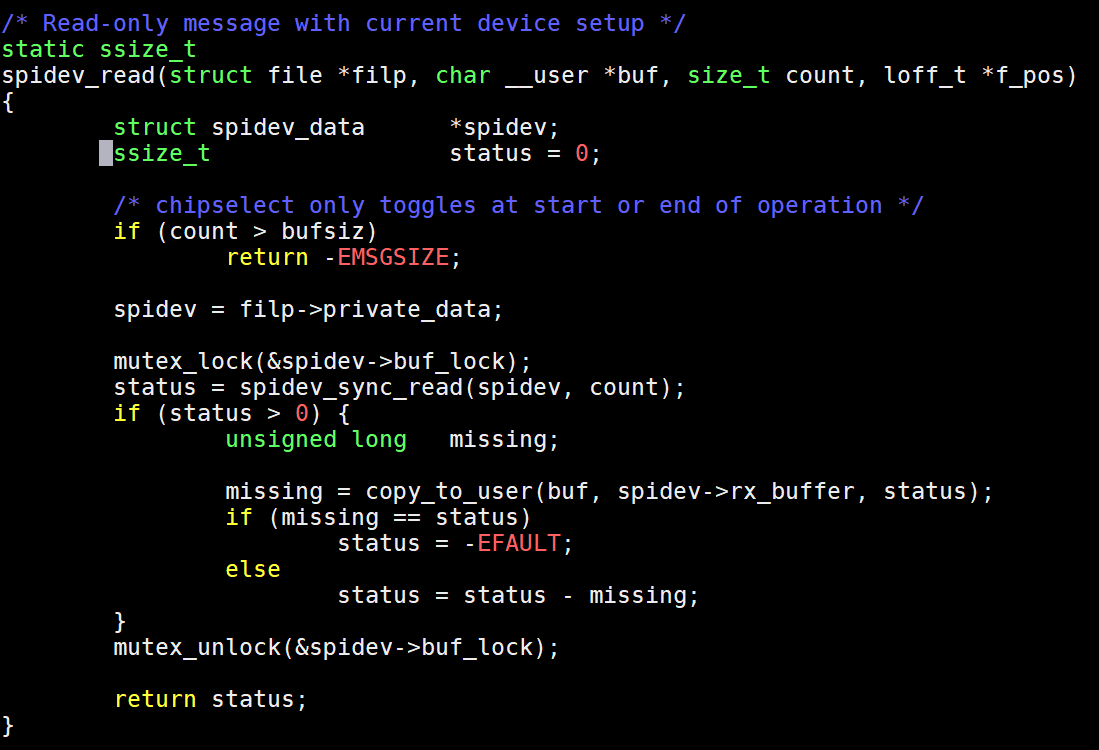
② spidev_read
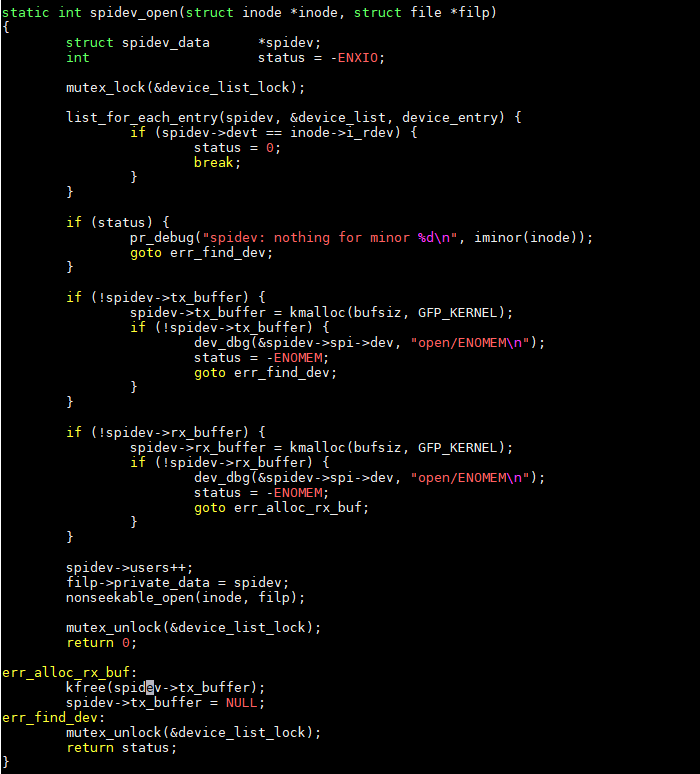
③ spidev_open
④ spidev_ioctl
可以分为三类:
- spi通信参数获取
- spi通信参数设置
- 数据的传输
常用SPI ioctl参数及功能:
**SPI_IOC_RD_MODE**读取当前SPI模式。 会把当前的通信时序模式(极性和相位设置)读到一个整数中,方便查看。**SPI_IOC_WR_MODE**设置SPI模式。 需要传入一个数字,用两位二进制表示时钟极性(CPOL)和相位(CPHA)。**SPI_IOC_RD_BITS_PER_WORD**读取数据位宽。 会把每个数据包包含的位数(比如8位、16位)读到一个整数里。**SPI_IOC_WR_BITS_PER_WORD**设置数据位宽。 传入一个数字,指定每个数据包发送/接收的位数(如8位)。**SPI_IOC_RD_MAX_SPEED_HZ**读取当前最大速率。 会把SPI总线的当前最大传输速度(单位:赫兹)读到一个整数里。**SPI_IOC_WR_MAX_SPEED_HZ**设置最大速率。 传入一个数字,指定SPI总线允许的最高速率(如1MHz)。**SPI_IOC_MESSAGE(N)**执行多步读写操作。 需要传入一个包含_N_个传输任务的数组,每个任务描述一次发送/接收操作(比如先发数据再读结果)。**SPI_IOC_RD_LSB_FIRST**读取数据顺序设置。 会返回是否启用“先发送最低有效位(LSB)”的模式。**SPI_IOC_WR_LSB_FIRST**设置数据顺序。 传入0或1,决定是否启用“先发送LSB”的模式(默认通常是高位在前)。
:::
简单总结:
RD_ 开头的参数:读取当前设置(如模式、速率)。
WR_ 开头的参数:设置新值(需传入数值)。
SPI_IOC_MESSAGE 是核心操作,用于实际的数据收发,支持一次执行多个步骤。 :::
C
static long
spidev_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int retval = 0;
struct spidev_data *spidev;
struct spi_device *spi;
u32 tmp;
unsigned n_ioc;
struct spi_ioc_transfer *ioc;
/* Check type and command number */
if (_IOC_TYPE(cmd) != SPI_IOC_MAGIC)
return -ENOTTY;
/* guard against device removal before, or while,
* we issue this ioctl.
*/
spidev = filp->private_data;
spin_lock_irq(&spidev->spi_lock);
spi = spi_dev_get(spidev->spi);
spin_unlock_irq(&spidev->spi_lock);
if (spi == NULL)
return -ESHUTDOWN;
/* use the buffer lock here for triple duty:
* - prevent I/O (from us) so calling spi_setup() is safe;
* - prevent concurrent SPI_IOC_WR_* from morphing
* data fields while SPI_IOC_RD_* reads them;
* - SPI_IOC_MESSAGE needs the buffer locked "normally".
*/
mutex_lock(&spidev->buf_lock);
switch (cmd) {
/* read requests */
case SPI_IOC_RD_MODE:
retval = put_user(spi->mode & SPI_MODE_MASK,
(__u8 __user *)arg);
break;
case SPI_IOC_RD_MODE32:
retval = put_user(spi->mode & SPI_MODE_MASK,
(__u32 __user *)arg);
break;
case SPI_IOC_RD_LSB_FIRST:
retval = put_user((spi->mode & SPI_LSB_FIRST) ? 1 : 0,
(__u8 __user *)arg);
break;
case SPI_IOC_RD_BITS_PER_WORD:
retval = put_user(spi->bits_per_word, (__u8 __user *)arg);
break;
case SPI_IOC_RD_MAX_SPEED_HZ:
retval = put_user(spidev->speed_hz, (__u32 __user *)arg);
break;
/* write requests */
case SPI_IOC_WR_MODE:
case SPI_IOC_WR_MODE32:
if (cmd == SPI_IOC_WR_MODE)
retval = get_user(tmp, (u8 __user *)arg);
else
retval = get_user(tmp, (u32 __user *)arg);
if (retval == 0) {
u32 save = spi->mode;
if (tmp & ~SPI_MODE_MASK) {
retval = -EINVAL;
break;
}
tmp |= spi->mode & ~SPI_MODE_MASK;
spi->mode = (u16)tmp;
retval = spi_setup(spi);
if (retval < 0)
spi->mode = save;
else
dev_dbg(&spi->dev, "spi mode %x\n", tmp);
}
break;
case SPI_IOC_WR_LSB_FIRST:
retval = get_user(tmp, (__u8 __user *)arg);
if (retval == 0) {
u32 save = spi->mode;
if (tmp)
spi->mode |= SPI_LSB_FIRST;
else
spi->mode &= ~SPI_LSB_FIRST;
retval = spi_setup(spi);
if (retval < 0)
spi->mode = save;
else
dev_dbg(&spi->dev, "%csb first\n",
tmp ? 'l' : 'm');
}
break;
case SPI_IOC_WR_BITS_PER_WORD:
retval = get_user(tmp, (__u8 __user *)arg);
if (retval == 0) {
u8 save = spi->bits_per_word;
spi->bits_per_word = tmp;
retval = spi_setup(spi);
if (retval < 0)
spi->bits_per_word = save;
else
dev_dbg(&spi->dev, "%d bits per word\n", tmp);
}
break;
case SPI_IOC_WR_MAX_SPEED_HZ:
retval = get_user(tmp, (__u32 __user *)arg);
if (retval == 0) {
u32 save = spi->max_speed_hz;
spi->max_speed_hz = tmp;
retval = spi_setup(spi);
if (retval >= 0)
spidev->speed_hz = tmp;
else
dev_dbg(&spi->dev, "%d Hz (max)\n", tmp);
spi->max_speed_hz = save;
}
break;
default:
/* segmented and/or full-duplex I/O request */
/* Check message and copy into scratch area */
ioc = spidev_get_ioc_message(cmd,
(struct spi_ioc_transfer __user *)arg, &n_ioc);
if (IS_ERR(ioc)) {
retval = PTR_ERR(ioc);
break;
}
if (!ioc)
break; /* n_ioc is also 0 */
/* translate to spi_message, execute */
retval = spidev_message(spidev, ioc, n_ioc);
kfree(ioc);
break;
}
mutex_unlock(&spidev->buf_lock);
spi_dev_put(spi);
return retval;
}spi_ioc_transfer
- spidev_get_ioc_message
- spidev_message
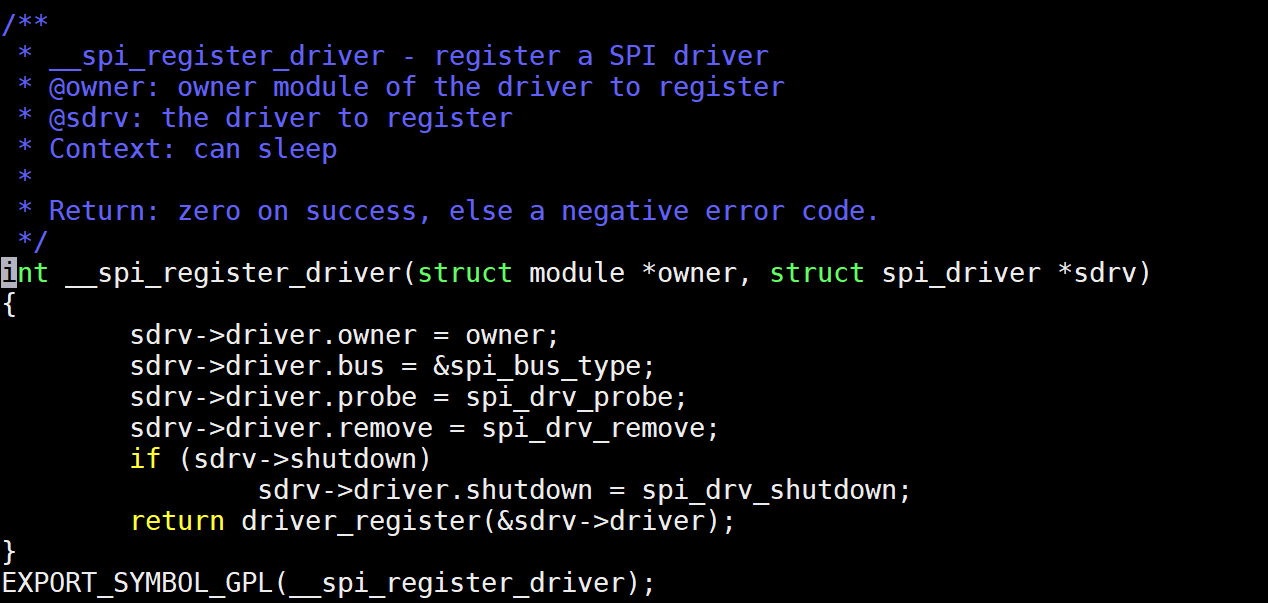
四、spi_register_driver分析

spi/spi.c
五、spi_dev缺点
使用SPI通信时:
- 读写函数(read/write)只能单次完成一个方向操作(要么读,要么写),这叫半双工模式。
- 通过ioctl命令可以设置参数,让设备同时进行读写操作(全双工模式)。
但使用spidev接口有两点限制:
- 没有中断功能:设备状态变化时无法自动通知CPU
- 只能同步操作:执行读/写命令时,程序必须等到操作完全结束才能继续往下执行,不能同时处理其他任务