03、SG90 舵机驱动实验
一、原理
SG90舵机是一种常见的旋转电机模块。它能转动的角度主要有三种类型:0到90度的小范围转动,0到180度的半圆转动,以及可以完整旋转360度的全周模式。这种电机常用于需要精准控制转动的场景,例如:
- 智能垃圾桶的自动开盖
- 让智能小车实现灵活转向
- 摄像头支架的多角度调整
- 机械臂的关节运动控制
它的设计简单实用,特别适合需要精确控制角度的自动化项目。

SG90舵机通常通过PWM信号控制角度。它的工作原理很简单:
- 信号周期:每20毫秒(0.02秒)发送一次控制信号。
- 高电平时间:在这20毫秒里,给舵机发送高电平的时长决定了转动角度。
- 占空比公式:占空比 = 高电平时间 ÷ 20毫秒
比如:
- 当高电平持续1毫秒时,舵机转到0度;
- 高电平1.5毫秒时转到中间位置90度;
- 2毫秒时则转到180度。
简单来说,就是通过调整每次信号中高电平的持续时间(1-2毫秒之间),就能精准控制舵机转动的角度。
G90舵机角度控制说明(信号周期固定为20ms):
脉冲宽度对应角度关系:
- 0.5ms → 0°
- 1.0ms → 45°
- 1.5ms → 90°
- 2.0ms → 135°
- 2.5ms → 180°
::: (通过调整高电平信号的持续时间,可在20ms周期内控制舵机转向不同角度) :::
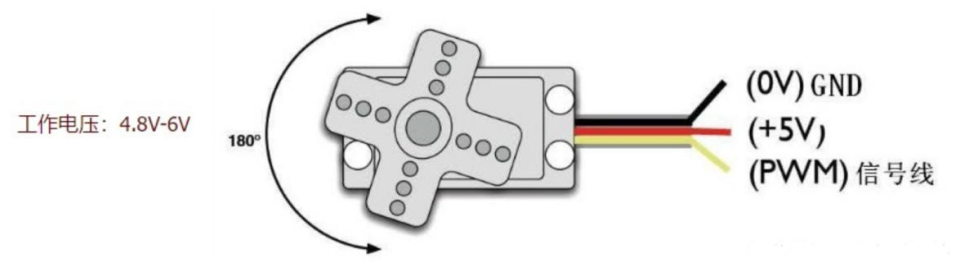
二、硬件连接
SG90舵机的三根线功能如下:
- 棕线:连接电源地(GND);
- 红线:连接电源(需4.8V到7.2V的电压);
- 黄线:接收PWM控制信号(用于调整舵机角度)。
以下是更直白的改写版本:
三、实验代码
3.1 检查GPIO占用
目的:确保你要用的GPIO引脚没有被其他功能占用 操作:
- 查看芯片手册,确认目标GPIO的复用功能是否已关闭
- 检查设备树配置,确保该GPIO未被设置为其他设备的信号引脚
3.2 配置内核驱动
步骤1:修改 Makefile 在 kernel/drivers/pwm/ 文件夹的 Makefile 文件中,添加一行:
C
obj-$(CONFIG_PWM_SG90) += pwm-SG90.o(这行代码的作用是告诉内核需要编译这个驱动模块)
步骤2:添加配置选项 在同一个文件夹的 Kconfig 文件中,添加:
C
config PWM_SG90
tristate "SG90舵机驱动"
help
启用对SG90伺服电机PWM驱动的支持步骤3:启用驱动支持 在内核配置文件 configs/tspi_defconfig 中,添加:
C
CONFIG_PWM_SG90=y:::
总结操作流程
检查并确认GPIO可用性
在驱动目录修改两个配置文件(Makefile 和 Kconfig)
在设备配置文件中启用该驱动选项 :::
这样修改后,内核编译时就会包含对SG90伺服电机的PWM控制支持。

3.3、修改设备树
C
/ {
......
hc_sg90 {
compatible = "hc-sg90";
pwms = <&pwm12 0 20000000 0>;
status = "okay";
};
};
&pwm12 {
pinctrl-names = "active";
pinctrl-0 = <&pwm12m1_pins>;
status = "okay";
};3.4、驱动
C
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/platform_device.h>
#include <linux/of.h>
#include <linux/gpio.h>
#include <linux/uaccess.h>
#include <linux/string.h>
#include <linux/interrupt.h>
#include <linux/irqreturn.h>
#include <linux/of_gpio.h>
#include <linux/slab.h>
#include <linux/device.h>
#include <linux/fs.h>
#include <linux/kernel.h>
#include <linux/wait.h>
#include <linux/sched.h>
#include <linux/timer.h>
#include <linux/gpio/consumer.h>
#include <linux/delay.h>
#include <linux/timekeeping.h>
#include <linux/wait.h>
#include <linux/irqflags.h>
#include <linux/pwm.h>
static int major;
static struct class *class;
static struct pwm_device *pwm_test;
static int sg90_probe(struct platform_device *pdev)
{
struct device_node *node = pdev->dev.of_node;
printk("sg90 match success \n");
if (node){
/* 从子节点中获取PWM设备 ___ */
pwm_test = devm_of_pwm_get(&pdev->dev, node, NULL);
if (IS_ERR(pwm_test)){
printk(KERN_ERR" pwm_test,get pwm error!!\n");
return -1;
}
}
else{
printk(KERN_ERR" pwm_test of_get_next_child error!!\n");
return -1;
}
pwm_config(pwm_test, 1500000, 20000000); /* 配置PWM:1.5ms,90度,周期:20000000ns = 20ms */
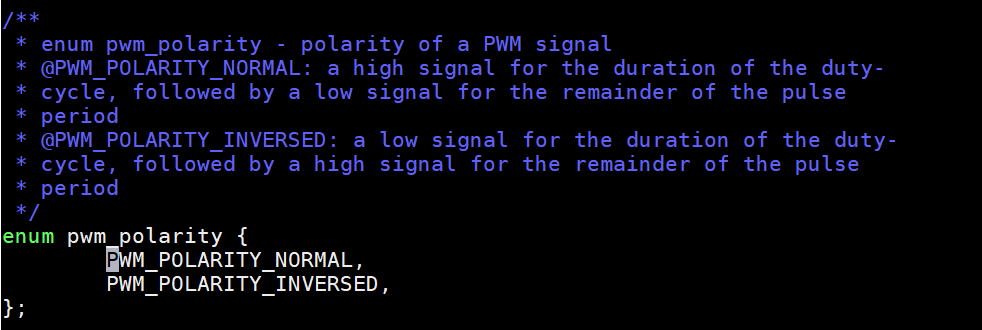
pwm_set_polarity(pwm_test, PWM_POLARITY_NORMAL); /* 设置输出极性:占空比为高电平 */
pwm_enable(pwm_test); /* 使能PWM输出 */
return 0;
}
static int sg90_remove(struct platform_device *dev)
{
pwm_config(pwm_test, 500000, 20000000); /* 配置PWM:0.5ms,0度 */
pwm_free(pwm_test);
return 0;
}
static const struct of_device_id sg90_of_match[] = {
{ .compatible = "hc-sg90" },
{ }
};
static struct platform_driver sg90_platform_driver = {
.driver = {
.name = "my_sg90",
.of_match_table = sg90_of_match,
},
.probe = sg90_probe,
.remove = sg90_remove,
};
static int sg90_open (struct inode *node, struct file *filp)
{
return 0;
}
//0.5ms————0度;
//1.0ms————45度;
//1.5ms————90度;
//2.0ms————135度;
//2.5ms————180度;
//data[0] --- > 500000
static ssize_t sg90_write (struct file *filp, const char __user *buf, size_t size, loff_t *offset)
{
int res;
unsigned char data[1];
if(size != 1)
return 1;
res = copy_from_user(data, buf, size);
/* 配置PWM:旋转任意角度(单位1度) */
pwm_config(pwm_test, data[0], 20000000);
return 1;
}
static int sg90_release (struct inode *node, struct file *filp)
{
return 0;
}
static struct file_operations sg90_ops = {
.owner = THIS_MODULE,
.open = sg90_open,
.write = sg90_write,
.release = sg90_release,
};
static int sg90_init(void)
{
major = register_chrdev(0 , "sg90", &sg90_ops);
class = class_create(THIS_MODULE, "sg90_class");
device_create(class, NULL, MKDEV(major, 0), NULL, "sg90");
platform_driver_register(&sg90_platform_driver);
return 0;
}
static void sg90_exit(void)
{
platform_driver_unregister(&sg90_platform_driver);
device_destroy(class, MKDEV(major, 0));
class_destroy(class);
unregister_chrdev(major, "sg90");
}
module_init(sg90_init);
module_exit(sg90_exit);
MODULE_LICENSE("GPL");=