编码器驱动
本节介绍
📝本节您将学习如何使用 MSPM0G3507 的 keil 环境通过电机上的编码器,检测电机的速度。
🏆本章⽬标
1️⃣明白编码器的测速原理;
2️⃣明白如何通过配置引脚的外部中断外设,获取编码器的数据;
编码器原理
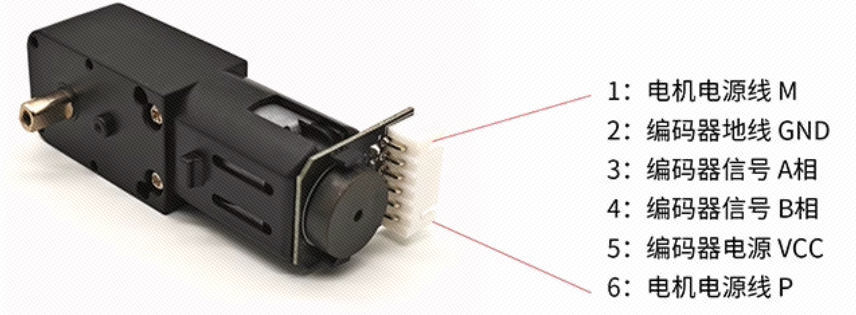
该项目的电机编码器使用的是 霍尔编码器。霍尔编码器由码盘和霍尔元件组成。霍尔码盘与电机主轴同轴,码盘上等分的分布有多个磁极,电机转动时,霍尔元件会输出若干个脉冲信号,我们正是利用这些脉冲信号实现电机的测速和电机转向的判断。
 |  |
|---|---|
如何实现测速
"电机转动时,霍尔元件会输出若干个脉冲信号"
- 当电机转的慢的时候,这个脉冲的输出速度就慢;
- 当电机转的快的时候,这个脉冲的输出速度就快;
那么我们就可以取固定时间内脉冲数的变化,来确定电机速度。
举个例子
我实时获取着编码器的脉冲数。然后,我每隔 1S 才取出这个脉冲数,取出后清零脉冲数。
我第一次 1S 的速度是 100 个脉冲,第二次 1S 的速度是 150 个脉冲,第三次 1S 的速度是 200 个脉冲。
这样的变化就可以知道速度是在变快的了。单位是 脉冲/S。
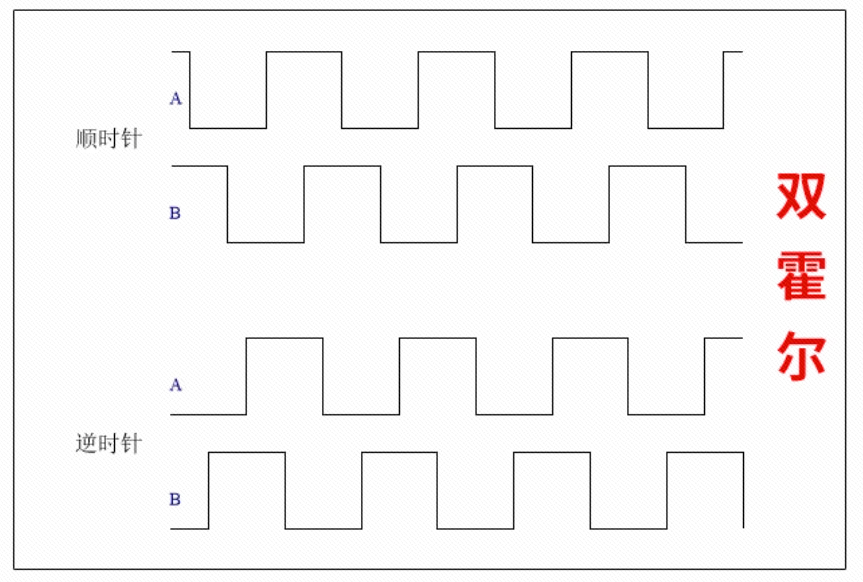
如何判断转向
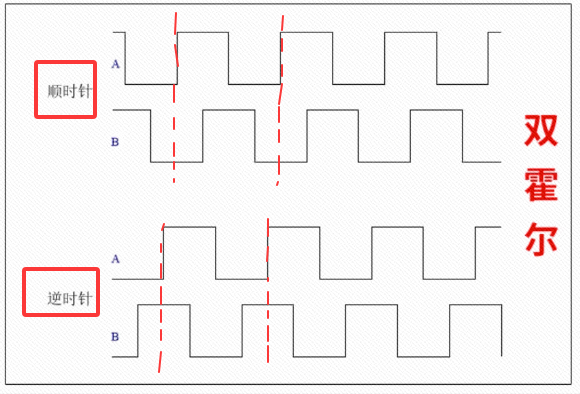
编码器的 A相 和 B相 相位差 90°,就可以用于判断旋转方向(通过哪个信号先跳变)。比如我设置了 A相 的上升沿中断。
- 当A相上升沿触发时,如果 B相 当前处于
低电平,则是顺时针旋转; - 当A相上升沿触发时,如果 B相 当前处于
高电平,则是逆时针旋转;
 |
|---|
这里仅为举例,电机具体的旋转方向那一边是顺那一边是逆,是由你写代码的说的算。如果要更精准的检测,那就A相B相都开启中断检测,双倍脉冲值。
硬件连接
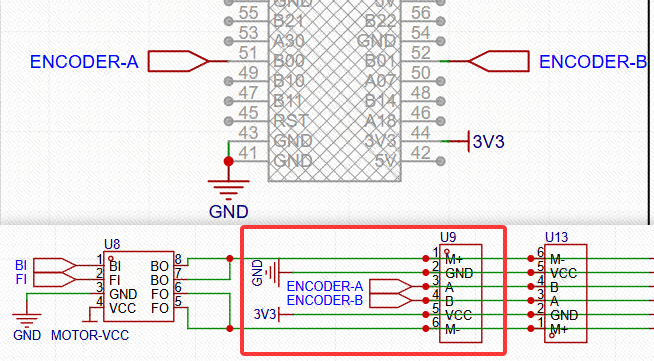
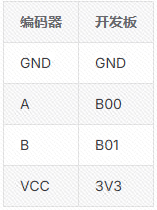
编码器与开发板的引脚连接表:
| 编码器 | 开发板 |
|---|---|
| GND | GND |
| A | B00 |
| B | B01 |
| VCC | 3V3 |
 |  |
|---|---|
原理图中的 U13 是为了兼容其他电机的编码器线序,不可将本案例的电机编码器接到 U13 接口。
按照 编码器原理 小节的说明,我们要实现测速和方向判断那就需要实现引脚的外部中断 + 定时器功能。
驱动方法
工程创建
复制粘贴上一个章节的工程,并重新命名为 05_encoder_driver 。
 |
|---|
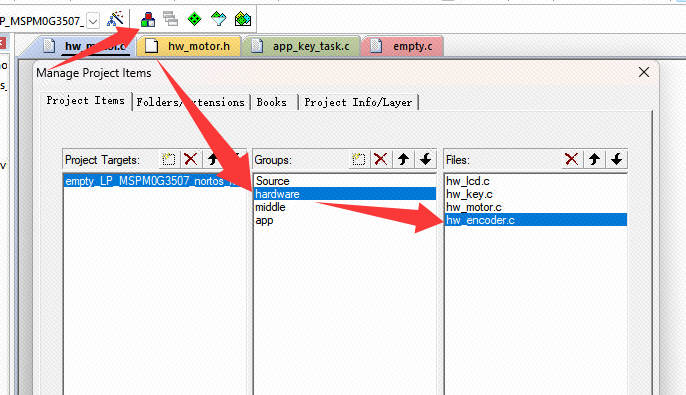
在新工程下的 harware 文件夹中,新建两个文件 hw_encoder.c 和 hw_encoder.h 。然后打开该工程,往工程下的 hardware 虚拟文件夹添加新建的 .c 文件。
 |  |
|---|---|
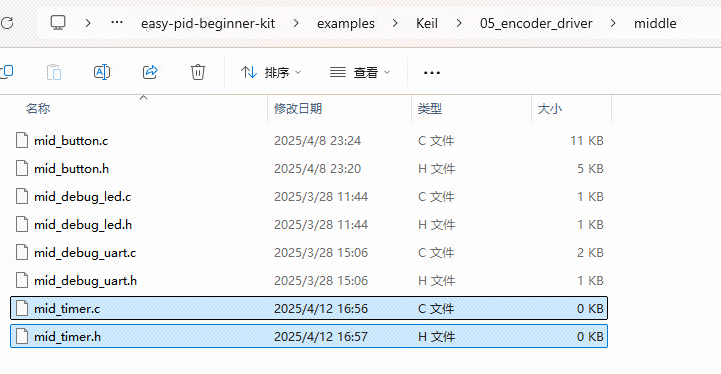
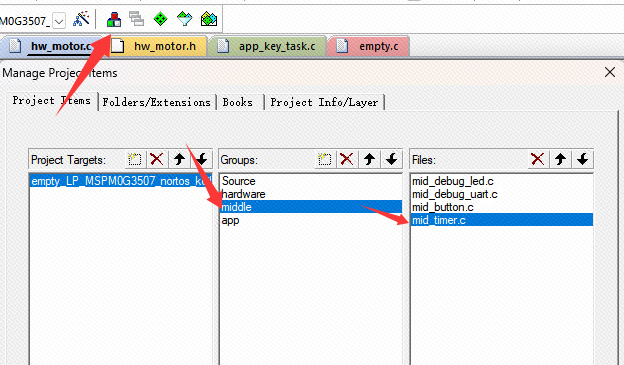
在工程下的 middle 文件夹中,新建两个文件 mid_timer.c 和 mid_timer.h 。然后在keil中往工程下的 middle 虚拟文件夹添加新建的 .c 文件。
 |  |
|---|---|
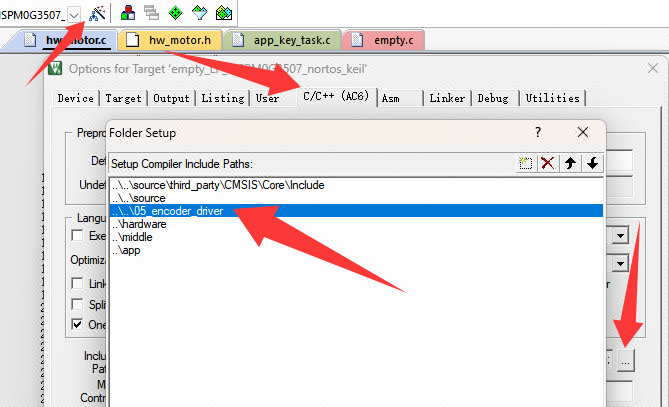
更新工程的头文件路径为该工程的路径。
 |
|---|
引脚配置
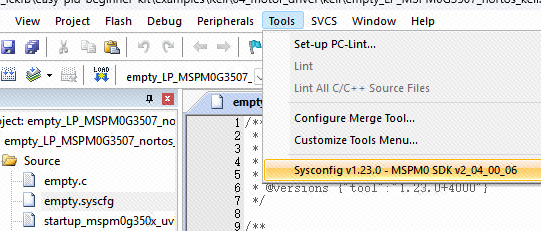
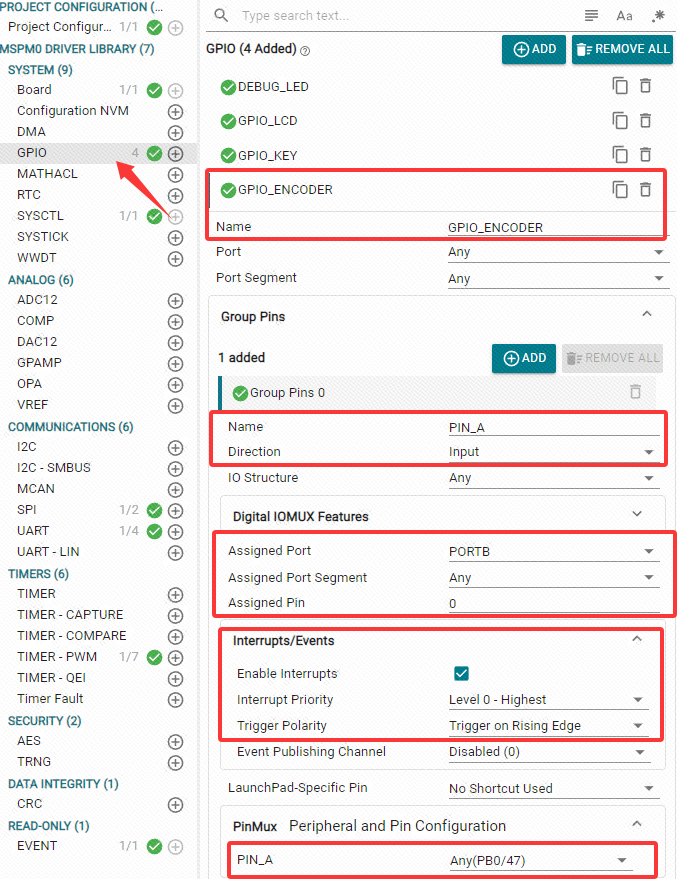
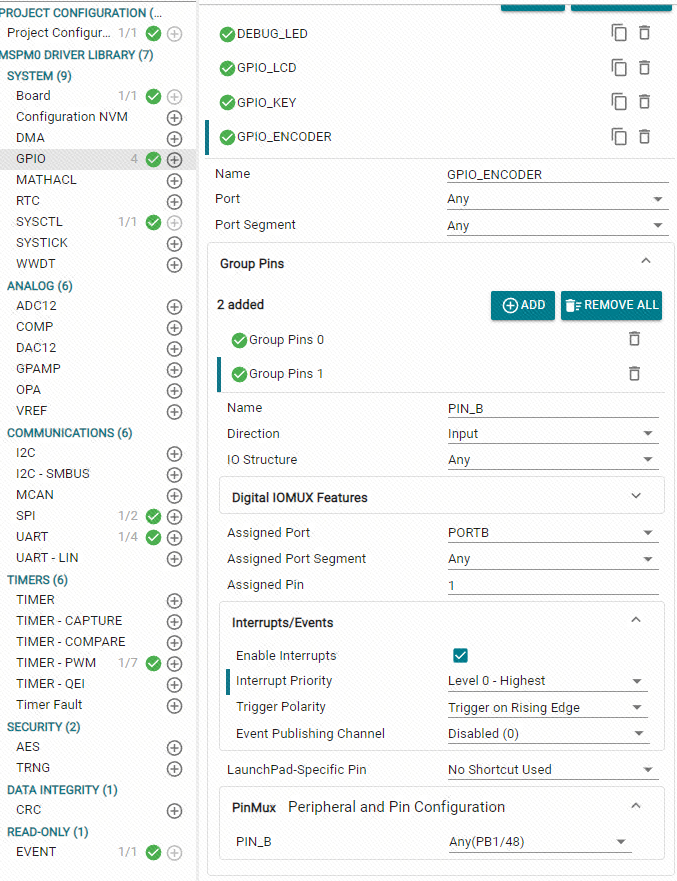
打开工程的 .syscfg 文件,再打开图形化代码生成工具,配置编码器对应的 A相 和 B相 引脚为输入模式,并都开启上升沿中断,中断优先级为最高。
 |  |
|---|---|
 |  |
|---|---|
再配置一个定时器用于测速。设置为周期的计数模式,开启 20ms 的中断,中断优先级为最低。
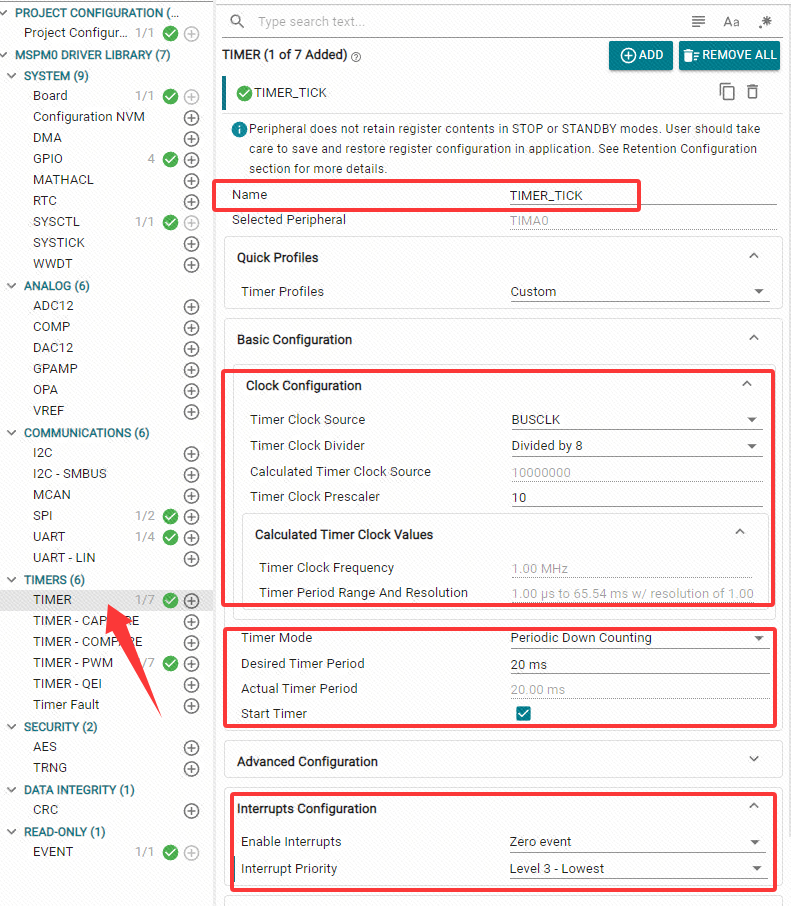 |
|---|
获取编码器脉冲
往 hw_encoder.c 文件中加入以下hw_encoder.c选项页的代码,往 hw_encoder.h 文件中加入以下hw_encoder.h选项页的代码:
以下代码实现了编码器的脉冲计数 + 方向判断。
#include "hw_encoder.h"
static ENCODER_RES motor_encoder;
//编码器初始化
void encoder_init(void)
{
//编码器引脚外部中断
NVIC_ClearPendingIRQ(GPIOB_INT_IRQn);
NVIC_EnableIRQ(GPIOB_INT_IRQn);
}
//获取编码器的值
int get_encoder_count(void)
{
return motor_encoder.count;
}
//获取编码器的方向
ENCODER_DIR get_encoder_dir(void)
{
return motor_encoder.dir;
}
//编码器数据更新
//请间隔一定时间更新
void encoder_update(void)
{
motor_encoder.count = motor_encoder.temp_count;
//确定方向
motor_encoder.dir = ( motor_encoder.count >= 0 ) ? FORWARD : REVERSAL;
motor_encoder.temp_count = 0;//编码器计数值清零
}
//外部中断处理函数
void GROUP1_IRQHandler(void)
{
uint32_t gpio_status;
//获取中断信号情况
gpio_status = DL_GPIO_getEnabledInterruptStatus(GPIO_ENCODER_PORT, GPIO_ENCODER_PIN_A_PIN | GPIO_ENCODER_PIN_B_PIN);
//编码器A相上升沿触发
if((gpio_status & GPIO_ENCODER_PIN_A_PIN) == GPIO_ENCODER_PIN_A_PIN)
{
//如果在A相上升沿下,B相为低电平
if(!DL_GPIO_readPins(GPIO_ENCODER_PORT,GPIO_ENCODER_PIN_B_PIN))
{
motor_encoder.temp_count--;
}
else
{
motor_encoder.temp_count++;
}
}//编码器B相上升沿触发
else if((gpio_status & GPIO_ENCODER_PIN_B_PIN)==GPIO_ENCODER_PIN_B_PIN)
{
//如果在B相上升沿下,A相为低电平
if(!DL_GPIO_readPins(GPIO_ENCODER_PORT,GPIO_ENCODER_PIN_A_PIN))
{
motor_encoder.temp_count++;
}
else
{
motor_encoder.temp_count--;
}
}
//清除状态
DL_GPIO_clearInterruptStatus(GPIO_ENCODER_PORT,GPIO_ENCODER_PIN_A_PIN|GPIO_ENCODER_PIN_B_PIN);
}#ifndef _HW_ENCODER_H_
#define _HW_ENCODER_H_
#include "ti_msp_dl_config.h"
typedef enum {
FORWARD, // 正向
REVERSAL // 反向
} ENCODER_DIR;
typedef struct {
volatile long long temp_count; //保存实时计数值
int count; //根据定时器时间更新的计数值
ENCODER_DIR dir; //旋转方向
} ENCODER_RES;
void encoder_init(void);
int get_encoder_count(void);
ENCODER_DIR get_encoder_dir(void);
void encoder_update(void);
#endif往 hw_timer.c 文件中加入以下hw_timer.c选项页的代码,往 hw_timer.h 文件中加入以下hw_timer.h选项页的代码:
以下代码实现了编码器的固定时间内的速度记录,并将按键扫描的代码从 main 函数中放到了这里,更加方便按键的事件管理。
#include "mid_timer.h"
#include "hw_encoder.h"
#include "mid_button.h"
void timer_init(void)
{
//定时器中断
NVIC_ClearPendingIRQ(TIMER_TICK_INST_INT_IRQN);
NVIC_EnableIRQ(TIMER_TICK_INST_INT_IRQN);
}
//电机编码器脉冲计数
void TIMER_TICK_INST_IRQHandler(void)
{
//20ms归零中断触发
if( DL_TimerA_getPendingInterrupt(TIMER_TICK_INST) == DL_TIMER_IIDX_ZERO )
{
//编码器更新
encoder_update();
//按键扫描+事件管理
flex_button_scan();
}
}#ifndef __MID_TIMER_H__
#define __MID_TIMER_H__
#include "ti_msp_dl_config.h"
void timer_init(void);
#endif编码器驱动验证
往 empty.c 文件写入以下代码:
#include "ti_msp_dl_config.h"
#include "mid_debug_led.h"
#include "mid_debug_uart.h"
#include "string.h"
#include "stdio.h"
#include "hw_lcd.h"
#include "mid_button.h"
#include "app_key_task.h"
#include "hw_encoder.h"
#include "mid_timer.h"
void ui_home_page(void);// 首页页面初始化
void ui_encoder_value_update(void);//编码器的数据显示
int main(void)
{
int sys_time = 0;
SYSCFG_DL_init();
//DEBUG串口初始化
debug_uart_init();
//按键任务初始化
user_button_init();
//编码器初始化
encoder_init();
//定时器初始化
timer_init();
//LCD初始化
lcd_init();
//LCD显示UI
ui_home_page();
while (1)
{
sys_time++;
if( sys_time % 20 == 0 )//2*20=40ms刷新一次屏幕
{
ui_encoder_value_update();
}
delay_cycles(CPUCLK_FREQ / 1000 * 2);//时间基准2ms
}
}
/*
功能说明:显示居中字符串函数用于显示居中的文字,计算文字的居中坐标
参数说明: x=屏幕中心x坐标
w=屏幕宽度
y=屏幕中心y坐标
h=屏幕高度
str_len=字符串长度
sizey=字体大小
*str=需要显示的字符串
color背景颜色
备注:GRAYBLUE 浅蓝色
DARKBLUE 深蓝色
*/
void disp_x_center(int y, int str_len, uint16_t bc, unsigned char sizey, unsigned char* str)
{
int str_center_x = (sizey * str_len) / 2;//字符串x=字体大小*字符串长度/2
int str_center_y = sizey / 2;//字符串y=字体大小/2
//显示居中坐标的文字
LCD_ArcRect(screen_center_x - str_center_x - 10, y, screen_center_x + str_center_x + 10, sizey+y, bc);
LCD_ShowChinese(screen_center_x - str_center_x,y,str,WHITE,bc,sizey,1);
}
/*
功能说明:显示字符串矩形函数用于显示矩形的文字,计算文字的居中坐标
参数说明: x=矩形起始x坐标
w=矩形宽度
y=矩形起始y坐标
h=矩形高度
str_len=字符串长度
sizey=字体大小
*str=需要显示的字符串
color背景颜色
备注:GRAYBLUE 浅蓝色
DARKBLUE 深蓝色
*/
void disp_string_rect(int x, int w, int y, int h, int str_len, int sizey, unsigned char* str, int color)
{
int str_center_x = ((sizey/2) * str_len) / 2; //字符串x = 字体大小*字符串长度/2
int rect_center_x = x + (w / 2); //矩形中心x
int str_center_y = sizey / 2; //字符串y=字体大小/2
int rect_center_y = y + (h / 2); //矩形中心y
//显示背景矩形
LCD_ArcRect(x, y, x + w, y + h, color);
//显示字符串
LCD_ShowChinese(rect_center_x - str_center_x, rect_center_y - str_center_y,str,WHITE,color,sizey,1);
}
//首页页面初始化
void ui_home_page(void)
{
//关闭背光
LCD_BLK_Clr();
//显示全屏背景颜色
LCD_Fill(0,0,LCD_W,LCD_H,BLACK);
//显示标题
disp_x_center(3,5,BLUE,16,(unsigned char *)"立创开发板");
//显示副标题
disp_x_center(3+16+3,8,BLUE,16,(unsigned char *)"简易PID入门套件");
int x = 40;
int x_offset = 90;
int y = 65;
int y_offset = 25;
//显示speed
disp_string_rect(x, x_offset, y, y_offset, 5, 24, "speed", BLUE);
int x2 = 170;
int x2_offset = 120;
int y2 = 65;
int y2_offset = 25;
//显示direction
disp_string_rect(x2, x2_offset, y2, y2_offset, 9, 24, "direction", BLUE);
//打开背光
LCD_BLK_Set();
}
//编码器的速度+方向显示
void ui_encoder_value_update(void)
{
static int last_encoder_count = 255;
static int last_encoder_dir = 255;
char* disp_buff[50]={0};
if( last_encoder_count != get_encoder_count() )
{
last_encoder_count = get_encoder_count();
sprintf(disp_buff, "%d", get_encoder_count() );
int x = 30;
int x_offset = 110;
int y = 65+30;
int y_offset = 25;
disp_string_rect(x, x_offset, y, y_offset, strlen(disp_buff), 24, disp_buff, BLACK);
}
if( last_encoder_dir != get_encoder_dir() )
{
last_encoder_dir = get_encoder_dir();
int x2 = 170;
int x2_offset = 120;
int y2 = 65+30;
int y2_offset = 25;
sprintf(disp_buff, "%s", (get_encoder_dir() == FORWARD) ? "FORWARD" : "REVERSAL" );
disp_string_rect(x2, x2_offset, y2, y2_offset, strlen(disp_buff), 24, disp_buff, BLACK);
}
}效果: