该模块相对于传统的L298N效率上提高很多,体积上也大幅度减少,在额定范围内,芯片基本不发热,当然也就显得更加娇贵,所以我们建议有一定动手能力的朋友使用,接线的时候务必细心细心再细心,注意正负极性。
一、模块来源
二、规格参数
VM电机电压:< 12V
VCC芯片电压:2.7~5.5V
输出电流:1A
控制方式:PWM
以上信息见厂家资料文件
三、移植过程
我们的目标是将例程移植至MSPM0G3507开发板上【能够控制电机旋转速度的功能】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
1、查看资料
STBY口接单片机的IO口,STBY置0电机全部停止,置1才能工作。STBY置1后通过AIN1、AIN2、BIN1、BIN2 来控制正反转。
这里将STBY接入3.3V,让其一直为高电平,后续的电机停止控制通过IN1与IN2进行控制。
其中A端(AIN1与AIN2)只能控制AO1与AO2端。B端(BIN1与BIN2)只能控制BO1与BO2端。因此是双路电机驱动。
2、引脚选择
| GND | GND |
| VCC | 5V0 |
| VM | 接入电源(3.7V~12V) |
| STBY | 3.3V |
| PWMA | PA16 |
| AIN1 | PA14 |
| AIN2 | PA15 |
| PWMB | PA17 |
| BIN1 | PA12 |
| BIN2 | PA13 |
接下来我们配置 SYSCONFIG
- 双击 empty.syscfg 文件,打开它。
- 点击 ADD 添加GPIO配置
- 添加引脚配置
- 配置GPIO
其他都是一致的配置,除了引脚不一致。
- 添加PWM
- 配置PWM
Ctrl + S保存配置文件然后点击编译(可能会报错,我们不用管!)
- 然后我们所有设定的引脚和功能就会在 ti_msp_dl_config.h 中定义。因为这个文件我们包含进了 board.h 所以我们只需要引用 board.h 即可。【这里的 board.h 就充当了芯片头文件的作用】
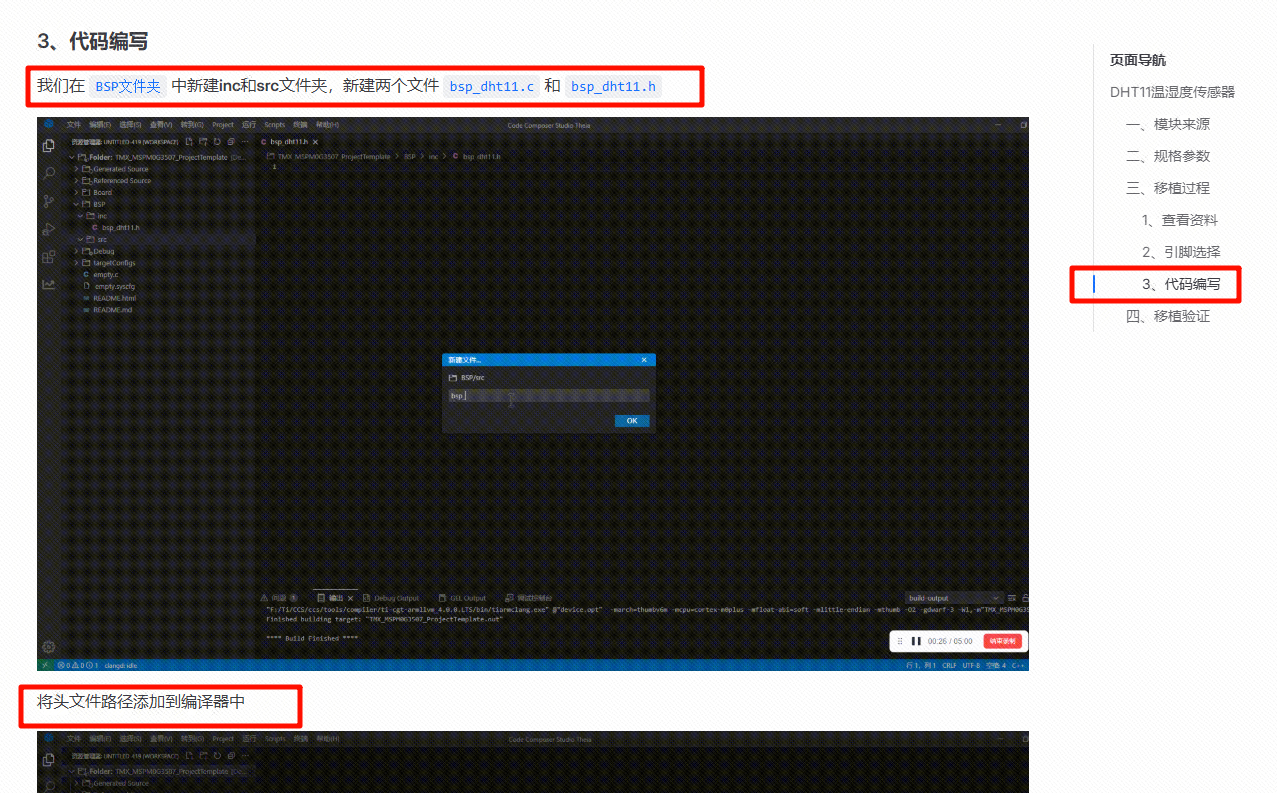
3、代码编写
我们在 BSP文件夹 中新建inc和src文件夹,新建两个文件 bsp_tb6612.c 和 bsp_tb6612.h,并且将头文件路径添加到编译器中。
在文件bsp_tb6612.c中,编写如下代码。
c
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#include "bsp_tb6612.h"
#include "board.h"
/******************************************************************
* 函 数 名 称:TB6612_Motor_Stop
* 函 数 说 明:A端和B端电机停止
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LCKFB
* 备 注:无
******************************************************************/
void TB6612_Motor_Stop(void)
{
AIN1_OUT(1);
AIN2_OUT(1);
BIN1_OUT(1);
BIN2_OUT(1);
}
/******************************************************************
* 函 数 名 称:AO_Control
* 函 数 说 明:A端口电机控制
* 函 数 形 参:dir旋转方向 1正转0反转 speed旋转速度,范围(0 ~ per-1)
* 函 数 返 回:无
* 作 者:LCKFB
* 备 注:speed 0-1000
******************************************************************/
void AO_Control(uint8_t dir, uint32_t speed)
{
if(speed > 999 || dir > 1)
{
lc_printf("\nAO_Control parameter error!!!\r\n");
return;
}
if( dir == 1 )
{
AIN1_OUT(0);
AIN2_OUT(1);
}
else
{
AIN1_OUT(1);
AIN2_OUT(0);
}
DL_TimerG_setCaptureCompareValue(PWM_0_INST, speed, GPIO_PWM_0_C1_IDX);
}
/******************************************************************
* 函 数 名 称:BO_Control
* 函 数 说 明:B端口电机控制
* 函 数 形 参:dir旋转方向 1正转0反转 speed旋转速度,范围(0 ~ per-1)
* 函 数 返 回:无
* 作 者:LCKFB
* 备 注:speed 0-1000
******************************************************************/
void BO_Control(uint8_t dir, uint32_t speed)
{
if(speed > 999 || dir > 1)
{
lc_printf("\nAO_Control parameter error!!!\r\n");
return;
}
if( dir == 1 )
{
BIN1_OUT(0);
BIN2_OUT(1);
}
else
{
BIN1_OUT(1);
BIN2_OUT(0);
}
DL_TimerG_setCaptureCompareValue(PWM_0_INST, speed, GPIO_PWM_0_C0_IDX);
}在文件bsp_tb6612.h中,编写如下代码。
c
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#ifndef _BSP_TB6612_H
#define _BSP_TB6612_H
#include "board.h"
#define AIN1_OUT(X) ( (X) ? (DL_GPIO_setPins(TB6612_PORT,TB6612_AIN1_PIN)) : (DL_GPIO_clearPins(TB6612_PORT,TB6612_AIN1_PIN)) )
#define AIN2_OUT(X) ( (X) ? (DL_GPIO_setPins(TB6612_PORT,TB6612_AIN2_PIN)) : (DL_GPIO_clearPins(TB6612_PORT,TB6612_AIN2_PIN)) )
#define BIN1_OUT(X) ( (X) ? (DL_GPIO_setPins(TB6612_PORT,TB6612_BIN1_PIN)) : (DL_GPIO_clearPins(TB6612_PORT,TB6612_BIN1_PIN)) )
#define BIN2_OUT(X) ( (X) ? (DL_GPIO_setPins(TB6612_PORT,TB6612_BIN2_PIN)) : (DL_GPIO_clearPins(TB6612_PORT,TB6612_BIN2_PIN)) )
void TB6612_Motor_Stop(void);
void AO_Control(uint8_t dir, uint32_t speed);
void BO_Control(uint8_t dir, uint32_t speed);
#endif /* _BSP_TB6612_H */四、移植验证
在empty.c中输入代码如下:
c
#include "ti_msp_dl_config.h"
#include "board.h"
#include "bsp_tb6612.h"
int main(void)
{
SYSCFG_DL_init();
TB6612_Motor_Stop();
lc_printf("\nTB6612 Motor Demo Start...\r\n");
while (1)
{
// 正反转自己定义
for(int i = 0; i < 1000; i += 50)
{
AO_Control(1, i);// A端电机转动 速度最大1000
BO_Control(1, i);// B端电机转动 速度最大1000
lc_printf("Dir[ 1 ] i[ %d ]\r\n",i);
delay_ms(500);
}
TB6612_Motor_Stop(); // 停止转动
delay_ms(1000);
for(int i = 0; i < 1000; i += 50)
{
AO_Control(0, i);// A端电机转动 速度最大1000
BO_Control(0, i);// B端电机转动 速度最大1000
lc_printf("Dir[ 0 ] i[ %d ]\r\n",i);
delay_ms(500);
}
TB6612_Motor_Stop(); // 停止转动
delay_ms(1000);
}
}【代码下载】
- 跳转到
下载中心去下载CCS模块移植代码:【点击跳转🚀】