I2C协议
本节介绍
📝本节您将学习I2C(Inter-Integrated Circuit)总线协议的核心原理与工程实践,掌握TMS320F28P550的双I2C外设模块特性,并通过SysConfig图形化工具实现板载姿态传感器数据采集与实时输出。
🏆本章目标
1️⃣理解I2C协议时序(起始/停止条件、ACK/NACK、时钟同步等)及主从架构。
2️⃣熟悉F28P550的I2C硬件特性(超快模式1MHz SCL、仲裁机制、FIFO缓冲)。
3️⃣掌握软件I2C(GPIO模拟)与硬件I2C(专用外设)的差异及适用场景。
4️⃣实战应用:配置I2C读取板载姿态传感器(LSM6DS3),在CCS的CIO窗口输出欧拉角/加速度数据。
I2C协议介绍
IIC(Inter-Integrated Circuit)协议也称为I2C总线,是一种串行通信协议,通常用于连接低速外设。它由Philips(现在的NXP Semiconductors)公司于1980年代初开发,现在已经成为一个标准。IIC总线只需要两条数据线,分别是串行数据线(SDA)和串行时钟线(SCL),这使得它成为一种非常简单的接口。它适用基于芯片的通信,例如连接传感器、存储器或数字信号处理器等。
在IIC协议中,总线上有一个主设备和多个从设备。主设备掌控着总线上的通信过程,负责发起、控制、停止通信。而从设备则需要等待主设备的请求,接收或发送数据。主设备和从设备之间的数据交换采用帧格式,每个帧通常包含地址、数据和控制信息。主设备根据从设备的地址来选中要通信的设备,从设备则根据控制信息进行相应的操作。IIC协议可以支持多个从设备连接到同一个主设备,为系统设计提供了更大的灵活性。
I2C的硬件实现
I2C总线通常使用两种电压电平,即高电平(VH)和低电平(VL)。高电平为2.5V至5.5V,低电平为0V至0.3V;这些电压电平范围是根据I2C规范确定的。I2C总线有不同的传输速率可选,包括标准模式(100 kbps)、快速模式(400 kbps)以及高速模式。传输速率的选择取决于应用的需求和设备的支持能力。为避免信号冲突,微处理器(MCU)必须只能驱动SDA和 SCL在低电平,即开漏输出。设置为开漏模式主要是为了保护器件和防止干扰。
- 防止干扰:多个器件共享同一条数据线(SDA)和同一条时钟线(SCL),如果采用推挽输出模式,多个器件的输出将会叠加在数据线上,造成信号干扰,严重时会损坏器件或导致通信错误。而采用开漏输出模式,则各个器件的输出只有拉低数据线的部分,不会干扰彼此,从而提高了总线的可靠性和抗干扰能力。
- 防止短路:在开漏输出模式下,由于器件的输出只有拉低数据线的部分,如果两个或多个器件同时输出,也不会造成短路。而如果采用推挽输出模式,两个或多个器件同时输出时,可能会形成短路。比如主设备输出高电平,从设备输出低电平。
- 因设置为开漏模式,需要连接一个外部的上拉电阻(例如:10k)将信号提拉至高电平。故I2C总线中的SDA(数据线)和SCL(时钟线)通常都连接了上拉电阻,以确保逻辑高电平的稳定性。上拉电阻的阻值通常在2.2kΩ至10kΩ之间,具体取决于总线的电容负载和通信距离。
I2C总线的最大线缆长度和传输容量受到一定限制。在标准模式下,最大线缆长度大约在1米左右,而在快速模式下,最大线缆长度约为0.3米。此外,线缆上的总线容量也会对传输速率产生影响。
I2C数据传输
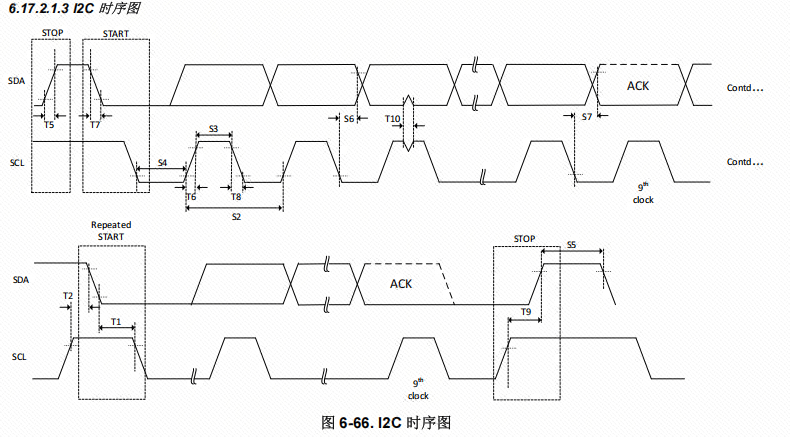
IIC只有两根通信线,因此它数据传输是基于时钟信号的。各个设备在时钟信号的控制下进行数据的收发操作。下面是IIC总线的几个重要的时序:
起始信号:SCL在高电平的状态下,SDA的电平由高转低,表示开始一次通信。
void IIC_Start(void)
{
SDA_OUT();//设置SDA为输出模式
SDA(1);
SCL(1);
delay_us(5);
SDA(0);
delay_us(5);
SCL(0);
delay_us(5);
}停止信号:SCL在高电平的状态下,SDA的电平由低转高,表示结束这次通信。主设备在发送停止信号后不能再向从设备发送任何数据,除非再次发送起始信号。
void IIC_Stop(void)
{
SDA_OUT();
SCL(0);
SDA(0);
SCL(1);
delay_us(5);
SDA(1);
delay_us(5);
}数据传输:主设备和从设备进行数据的传输,可以是一个或多个字节的数据,发送和接收都是基于地址选择的。
//发送一个字节
void IIC_Send_Byte(uint8_t dat)
{
int i = 0;
SDA_OUT();
SCL(0);
for( i = 0; i < 8; i++ )
{
SDA( (dat & 0x80) >> 7 );
delay_us(1);
SCL(1);
delay_us(5);
SCL(0);
delay_us(5);
dat<<=1;
}
}//接收一个字节
unsigned char IIC_Read_Byte(void)
{
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
SCL(0);
delay_us(5);
SCL(1);
delay_us(5);
receive<<=1;
if( SDA_GET() )
{
receive |= 1;
}
}
SCL(0);
return receive;
}I2C还提供了一种称为“ACK/NACK”(应答/非应答)的确认机制。如果一个设备接收到数据,它将通过在SDA线上拉低电平来发送一个应答信号以通知发送方数据已被接收。相反,如果数据被损坏或未接收,接收设备将发送非应答信号。(在SDA上保持高电平)。
//主机发送应答信号
void IIC_Send_Ack(void)
{
SDA_OUT();
SCL(0);
SDA(1);
SDA(0);
SCL(1);
delay_us(5);
SCL(0);
SDA(1);
}//主机发送非应答信号
void IIC_Send_Nack(void)
{
SDA_OUT();
SCL(0);
SDA(0);
SDA(1);
SCL(1);
delay_us(5);
SCL(0);
SDA(0);
}//主机等待从机的应答信号
//函 数 返 回:1=无应答 0=有应答
uint8_t IIC_Wait_Ack(void)
{
char ack = 0;
unsigned char ack_flag = 10;
SDA_IN();
SCL(0);
delay_us(5);
SCL(1);
delay_us(5);
while( (SDA_GET()==1) && ( ack_flag ) )
{
ack_flag--;
delay_us(5);
}
if( ack_flag <= 0 )
{
IIC_Stop();
return 1;
}
else
{
SCL(0);
SDA_OUT();
}
return ack;
}在IIC总线中,时钟线由主设备控制,每个数据位在时钟边沿更新,传输的最高速率取决于总线上最慢的设备。一般来讲,IIC总线的通信速率比较慢,通常在几百kbps的范围内。如果需要更高的传输速率,可以采用其他通信协议,如SPI协议、CAN协议等。
通信流程
I2C通信流程按照以下步骤进行:
- 主控向总线发送开始信号。
- 主控将要通信的设备地址和读写位(R/W)发送到总线上。
- 设备接收到地址后发送应答信号,主控接收到应答信号后发送数据或继续发送地址。
- 设备接收到数据后发送应答信号,主控接收到应答信号后可以继续发送数据或者停止通信。
- 主控向总线发送停止信号。
IIC基本参数
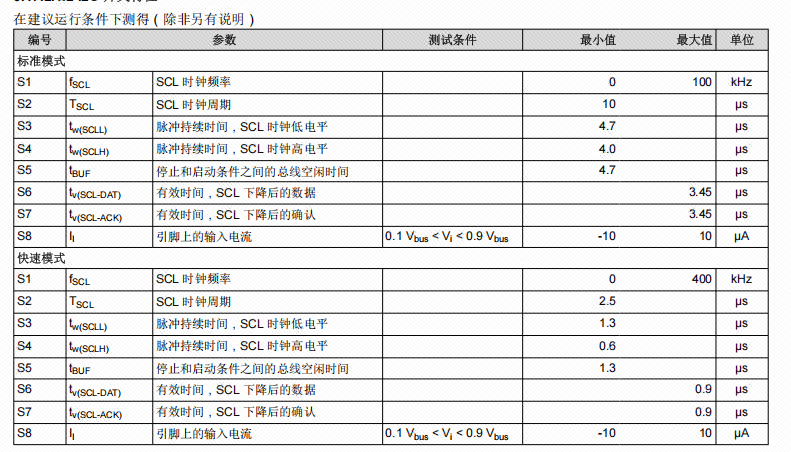
速率: I2C总线有标准模式(100 kbit/s)和快速模式(400 kbit/s)两种传输模式,还有更快的扩展模式和高速模式可供选择。
器件地址: 每个设备都有唯一的7位或10位地址,可以通过地址选择来确定与谁进行通信。
总线状态: I2C总线有五种状态,分别是空闲状态、起始信号、结束信号、响应信号、数据传输。
数据格式: I2C总线有两种数据格式,标准格式和快速格式。标准格式是8位数据字节加上1位ack/nack(应答/非应答)位,快速格式允许两个字节同时传输。
由于SCL和SDA线是双向的,它们也可能会由于外部原因(比如线路中的电容等)出现电平误差,而从而导致通信出错。因此,在IIC总线中,通常使用上拉电阻来保证信号线在空闲状态下的电平为高电平。
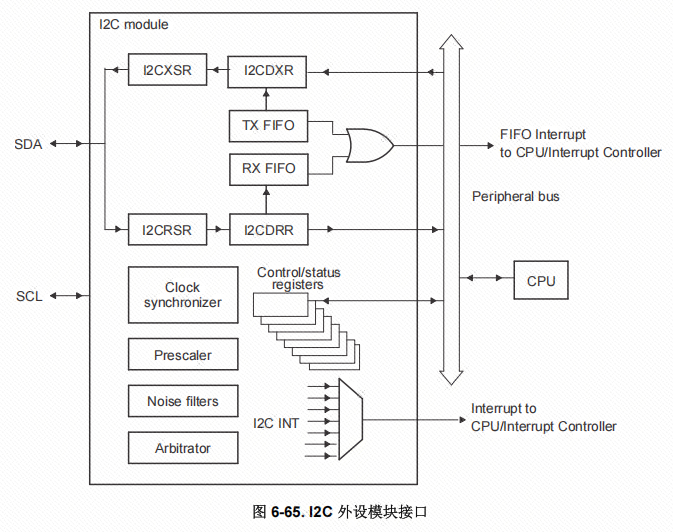
硬件I2C
TMS320F28P550的 I2C 支持主从模式,有7位和10位地址位可以设置,数据传输速率从 10kbps 到高达 400Kbps(快速模式)。 无论是主机或者从机,发送和接收都有独立的16个字节的接收与发送FIFO。
 |
|---|
 |  |
|---|---|
软件I2C与硬件I2C
I2C协议可以通过软件实现或者硬件实现。这两种方式的区别在于实现的方法和所需的硬件资源。
软件I2C
软件I2C是指通过在程序中编写代码来实现I2C通信协议。它利用通用输入输出(GPIO)引脚来模拟I2C的数据线(SDA)和时钟线(SCL),通过软件控制引脚的电平变化来传输数据和生成时序信号。与硬件I2C相比,软件I2C的优势在于不需要特定的硬件支持,可以在任何支持GPIO功能的微控制器上实现。它利用了微控制器的通用IO引脚来实现I2C通信协议。
软件I2C的实现通过编程方式来模拟I2C的主机和从机设备。通过逐位地读取和写入GPIO引脚的状态,并根据I2C协议的时序要求进行相应的操作,实现数据的传输和通信。软件I2C的灵活性较高,可以根据应用需求进行定制和扩展。它可以处理多个从机设备,并支持多主机环境。因此,软件I2C广泛应用于资源受限的MCU系统,特别是那些需要与多个外部设备进行通信的应用。
尽管软件I2C的性能相对于硬件I2C较低,但在一些低速通信和简单通信需求的场景下,软件I2C是一种经济实用的解决方案。
硬件I2C
硬件I2C是指通过专门的硬件模块来处理I2C通信协议。大多数现代微控制器和一些外部设备已经集成了硬件I2C模块,这些硬件模块负责处理I2C通信的细节,包括生成正确的时序信号、自动处理信号冲突、数据传输和错误检测等。可以直接使用硬件引脚连接,无需编写时序的代码。
使用硬件I2C通常相对简单,开发者无需编写复杂的代码来处理通信协议的细节。硬件模块可以直接与外部设备连接,通过专用的引脚进行数据和时钟传输,从而实现高效且可靠的通信。
在选择软件I2C还是硬件I2C时,需要考虑应用需求和硬件资源。软件I2C适用于资源受限的系统,可以在任何支持GPIO的微控制器上实现,但相对性能较低。硬件I2C通常性能更好,但需要硬件支持,并且可能占据一些特定的引脚资源。
IIC优缺点
优点
双向传输: I2C总线支持双向传输,可以通过SDA线同时传输主设备和从设备之间的数据,节约了总线的资源。
系统集成: I2C总线可以快速集成到芯片中,减少系统实现的逻辑复杂性,提高了设计效率。
多设备共享: I2C总线可以通过地址传输实现多个设备与主控器的通信,使得多个设备可以共享总线,并直接交互。
高可靠性: I2C总线使用逻辑层次的代替电气信号来表示数据传输,具有更高的传输可靠性。
缺点
带宽不高: I2C总线的传输速度限制在400 kbps,相比较于SPI总线和CAN总线,带宽相对较低。
时序要求严格: I2C总线传输数据需要严格遵循时序要求,特别是在高速传输过程,时序容易受到干扰,造成通信失败。
最长电缆长度有限: 虽然I2C总线可以通过中继器扩展总线长度,但是由于信号线受到干扰,信号衰减和时序要求等问题,电缆最长长度一般限制在1~2米之间。
总之,I2C总线具有双向传输、系统集成、多设备共享等优点,但传输速度相对较低,时序要求严格且最长电缆长度有限等缺点。
I2C应用
I2C总线是应用最广泛的通信接口之一,以下是几个常见的应用例子:
- 温度计传感器:常见的温度计传感器,如SHT31、LM75等,都采用I2C接口,其通过I2C总线将温度数据传输到主控器进行处理。
- LED驱动器:LED驱动器,如PCA9685,常用于控制LED灯的亮度和颜色,其通过I2C总线和主控器通信,可实现快速和精确定时。
- OLED显示屏:OLED显示屏通过I2C总线与主控器通信,可实现高清晰度的图形显示,应用于像表盘、智能手表、电子血压计等低功耗设备之中。
- 触摸屏控制器:常见的15寸及以下触摸屏控制器,如STMPE610,都采用I2C接口,这些控制器可提供触摸检测和X/Y坐标的读取等功能。
- 电流电压采集:电流或电压采集芯片,如INA219,可通过I2C总线和主控器通信,实现精确高速的电流电压数据采集,应用于电源管理和工业自动化等领域。
上述只是常见的应用例子之一,I2C总线在许多领域都有广泛的应用,具有性价比高、易于移植等优点。
案例实验介绍
以LSM6DS3 6轴姿态传感器作为实验案例。通过软件I2C的方式与其进行通信,获取加速度与陀螺仪情况。
LSM6DS3 介绍
LSM6DS3 是意法半导体(STMicroelectronics)推出的一款高性能、低功耗的六轴惯性测量单元(IMU),集成了 3D 数字加速度计 和 3D 数字陀螺仪。
低功耗设计
- 组合正常工作模式下功耗仅 0.9 mA,高性能模式下为 1.25 mA(数据输出速率可达 1.6 kHz)。
- 支持智能休眠唤醒功能,根据活动状态自动切换模式以节能。
高精度与低噪声
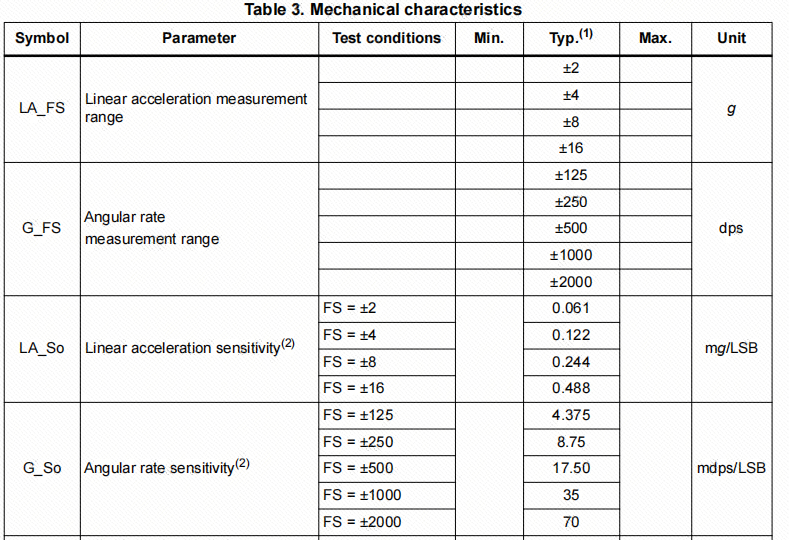
- 加速度计量程:±2/±4/±8/±16 g
- 陀螺仪量程:±125/±245/±500/±1000/±2000 dps
- 超低噪声性能,适合高精度运动检测。
硬件功能集成
- 内置 8KB FIFO 缓冲区,支持批量处理传感器数据(包括外部传感器、计步器、温度等)。
- 支持 自由落体检测、6D方向识别、单击/双击感应、活动监测,并可生成中断信号。
- 兼容 传感器集线器(Sensor Hub) 功能,可连接外部磁力计等传感器。
通信接口
支持 I2C 和 SPI 数字接口。
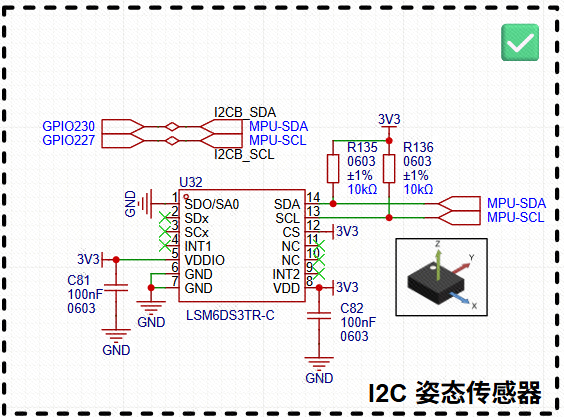
模块硬件连接
LSM6DS3 与开发板的连接如下:
| 开发板(主机) | LSM6DS3(从机) | 说明 |
|---|---|---|
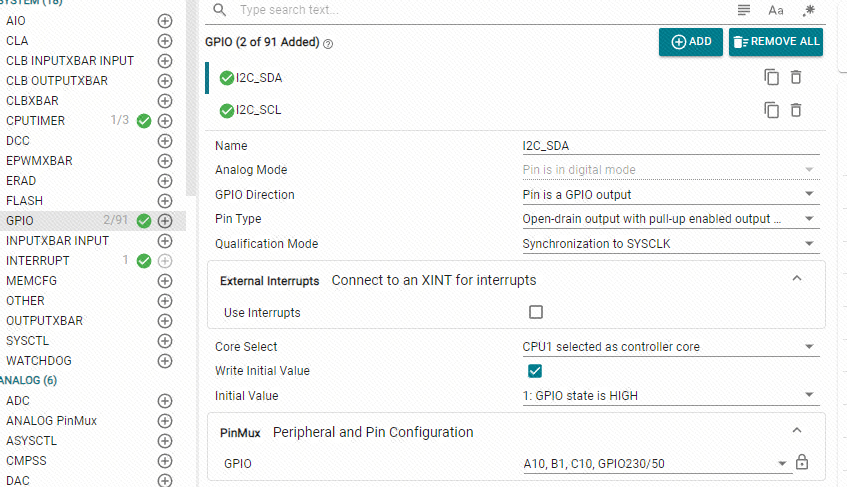
| GPIO230 | SDA | 数据线 |
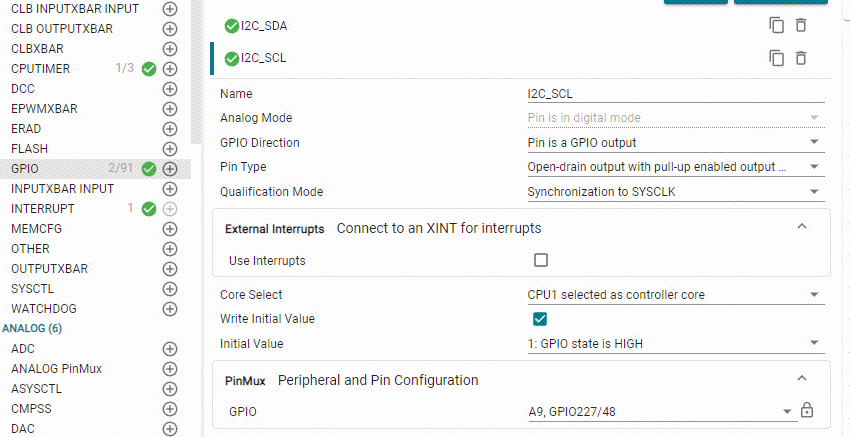
| GPIO227 | SCL | 时钟线 |
| GND | GND | 电源线 |
| VCC | 3V3 | 电源线 |
开发板上默认已经为大家贴好了该芯片,大家只需要了解连接的是哪一个引脚即可。
 |
|---|
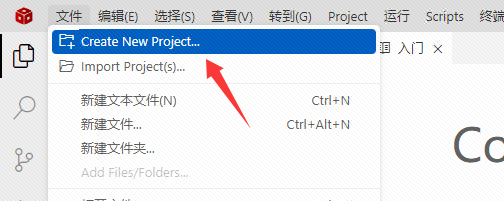
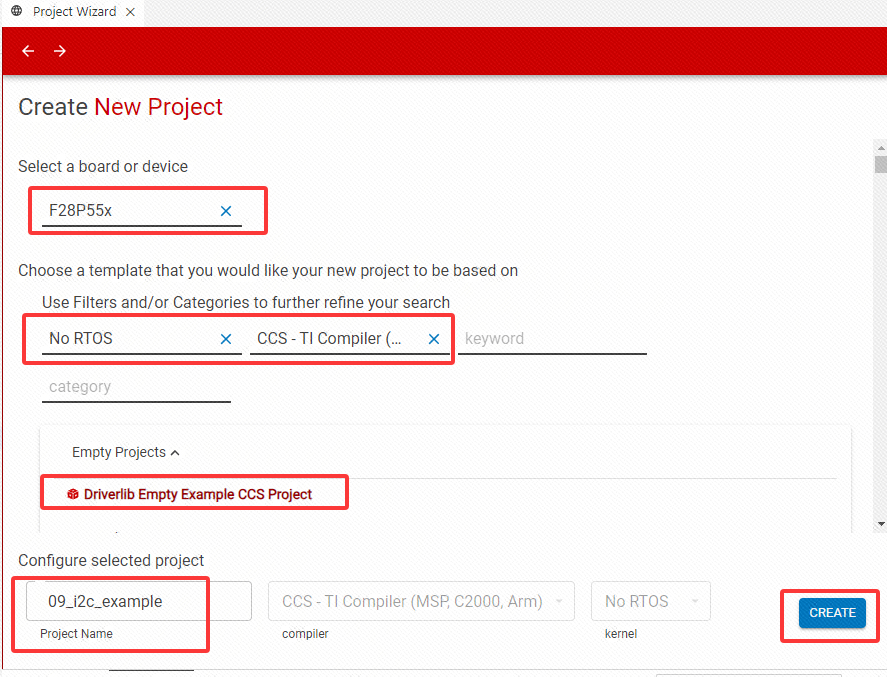
工程创建
打开CCS,创建一个新的基于 F28P55X 的工程。
 |  |
|---|---|
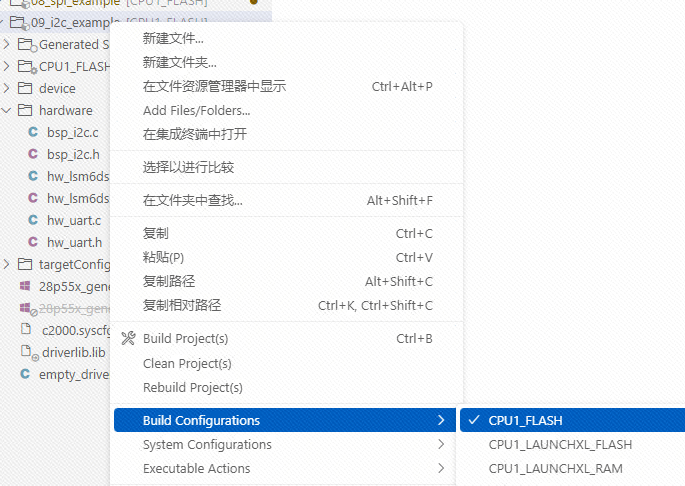
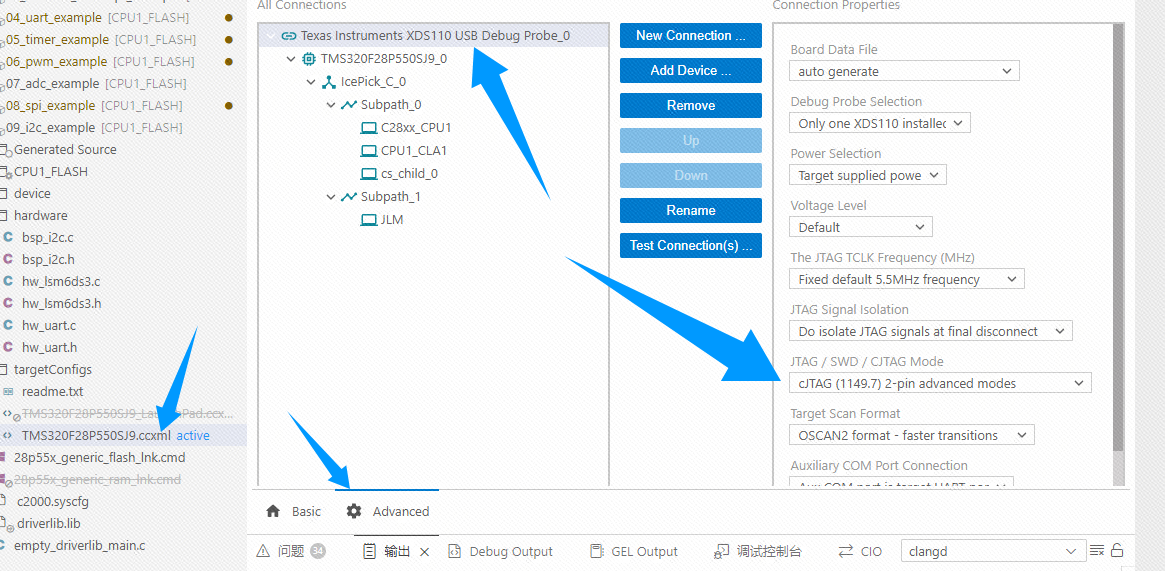
工程配置
配置工程选项,将我们后面写好的代码烧录到 FLASH 中,并且使用的烧录模式是 cJTAG(1149.7)2-pin 模式。
 |  |
|---|---|
软件 I2C 的配置
打开工程下的 .syscfg 文件。找到 GPIO 选项开始配置:
 |  |
|---|---|
完成I2C软件时序代码
我们在工程文件夹下新建一个文件夹:hardware。
在hardware文件夹下再新建两个文件,分别是 bsp_i2c.c 和 bsp_i2c.h。
更新头文件路径,新增我们保存 bsp_i2c.c 和 .h 的文件夹路径。
${PROJECT_ROOT}/hardware以上文件的操作完成之后,在bsp_i2c.h中编写以下代码:
#ifndef BSP_I2C_H
#define BSP_I2C_H
#include "board.h"
/************************ I2C ************************/
//设置SDA输出模式
#define SDA_OUT() { GPIO_setDirectionMode(I2C_SDA, GPIO_DIR_MODE_OUT);}
//设置SDA输入模式
#define SDA_IN() { GPIO_setDirectionMode(I2C_SDA, GPIO_DIR_MODE_IN); }
//获取SDA引脚的电平变化
#define SDA_GET() ( GPIO_readPin(I2C_SDA) )
//SDA与SCL输出
#define SDA(x) ( (x) ? (GPIO_writePin(I2C_SDA,1)) : (GPIO_writePin(I2C_SDA,0)) )
#define SCL(x) ( (x) ? (GPIO_writePin(I2C_SCL,1)) : (GPIO_writePin(I2C_SCL,0)) )
void i2c_start(void);
void i2c_stop(void);
void i2c_send_ack(unsigned char ack);
unsigned char i2c_wait_ack(void);
void i2c_send_byte(uint8_t dat);
unsigned char i2c_read_byte_ack(unsigned char ack);
#endifbsp_i2c.h 的代码用到了我们在图形化生成工具配置的 I2C_SDA 和 I2C_SCL,将其适配更新到该 .h 中。
如果你在图形化生成工具中的配置跟 软件 I2C 的配置 小节的一样则不需要理会。
在bsp_i2c.c中补充I2C时序的代码:
#include "bsp_i2c.h"
#define delay_us(X) DEVICE_DELAY_US(X) //I2C时序的微秒延时
#define I2C_DELAY_TIME 3 //I2C时序的延时时间
//发送开始信号
void i2c_start(void)
{
SDA_OUT();
SCL(0);
SDA(1);
SCL(1);
delay_us(I2C_DELAY_TIME);
SDA(0);
delay_us(I2C_DELAY_TIME);
SCL(0);
delay_us(I2C_DELAY_TIME);
}
//发送停止信号
void i2c_stop(void)
{
SDA_OUT();
SCL(0);
SDA(0);
SCL(1);
delay_us(I2C_DELAY_TIME);
SDA(1);
delay_us(I2C_DELAY_TIME);
}
/******************************************************************
* 函 数 说 明:主机发送应答或者非应答信号
* 函 数 形 参:0发送应答 1发送非应答
******************************************************************/
void i2c_send_ack(unsigned char ack)
{
SDA_OUT();
SCL(0);
SDA(0);
delay_us(I2C_DELAY_TIME);
if(!ack) SDA(0);
else SDA(1);
SCL(1);
delay_us(I2C_DELAY_TIME);
SCL(0);
SDA(1);
}
/******************************************************************
* 函 数 说 明:等待从机应答
* 函 数 返 回:0有应答 1超时无应答
******************************************************************/
unsigned char i2c_wait_ack(void)
{
char ack = 0;
char ack_flag = 50;
SDA_IN();
SDA(1);
while( (SDA_GET()==1) && ( ack_flag ) )
{
ack_flag--;
delay_us(I2C_DELAY_TIME);
}
if( ack_flag == 0 )
{
i2c_stop();
return 1;
}
else
{
SCL(1);
delay_us(I2C_DELAY_TIME);
SCL(0);
SDA_OUT();
}
return ack;
}
/******************************************************************
* 函 数 说 明:写入一个字节
* 函 数 形 参:dat要写入的数据
******************************************************************/
void i2c_send_byte(uint8_t dat)
{
int i = 0;
SDA_OUT();
SCL(0);//拉低时钟开始数据传输
for( i = 0; i < 8; i++ )
{
SDA( (dat & 0x80) >> 7 );
delay_us(2);
SCL(1);
delay_us(I2C_DELAY_TIME);
SCL(0);
delay_us(I2C_DELAY_TIME);
dat<<=1;
}
}
/******************************************************************
* 函 数 名: i2c_read_byte_ack
* 功能说明: CPU从I2C总线设备读取一个字节数据
* 形 参:ack : 1发送ACK应答,0发送nACK非应答
* 返 回 值: 读到的数据
******************************************************************/
unsigned char i2c_read_byte_ack(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
SCL(0);
delay_us(2);
SCL(1);
receive<<=1;
if(SDA_GET())
receive++;
delay_us(1);
}
if (!ack)
i2c_send_ack(1);//发送nACK
else
i2c_send_ack(0); //发送ACK
return receive;
}每一个时序的实现原理请看 I2C数据传输 小节的内容。
LSM6DS3的开发
在hardware文件夹下再新建两个文件,分别是 hw_lsm6ds3.c 和 hw_lsm6ds3.h。
I2C的设备地址
要进行I2C通信,需要知道其器件地址。并且了解如何与其进行通信。
LSM6DS3TR-C 的器件地址为 110101xb 。其中芯片的 SDO/SA0 引脚可用于修改设备地址的最低有效位。
- 如果 SDO/SA0 引脚连接到电源电压,则最低有效位为“1”(地址为 110101
1b); - 如果 SDO/SA0 引脚连接到地,则最低有效位为“0”(地址为 110101
0b)。
此方案允许将两个不同的惯性模块连接到同一 I2C 总线上并进行寻址。
在我们的板子上,SA0引脚接的是地 GND,故设备地址为 1101010,换算为16进制则为:0X6A。
写入与读取数据
在 LSM6DS3TR-C 中,有4种读写方式:
写入一个字节时序
 |
|---|
写入多个字节时序
 |
|---|
读取一个字节时序
 |
|---|
读取多个字节时序
 |
|---|
说明
- Master 表示主机;
- Slave 表示从机;
- ST 表示发送开始信号;
- SAD+W 表示发送设备地址 + 写入指令;
- SAD+R 表示发送设备地址 + 读取指令;
- SAK 表示从机的应答信号
- MAK 表示主机发送应答信号
- NMAK 表示主机发送非应答信号
- SUB 表示寄存器地址
- DATA 表示数据
- SP 表示发送停止信号
寄存器表
寄存器表(点击展开)
| 寄存器名称 | 类型 | 地址(Hex) | 默认值(Hex) | 功能描述 |
|---|---|---|---|---|
| RESERVED | - | 00 | - | 保留 |
| FUNC_CFG_ACCESS | r/w | 01 | 00 | 嵌入式功能配置寄存器 |
| RESERVED | - | 02-03 | - | 保留 |
| SENSOR_SYNC_TIME_FRAME | r/w | 04 | 00 | 传感器同步时间帧配置 |
| SENSOR_SYNC_RES_RATIO | r/w | 05 | 00 | 传感器同步分辨率比例配置 |
| FIFO_CTRL1 | r/w | 06 | 00 | FIFO控制寄存器1 |
| FIFO_CTRL2 | r/w | 07 | 00 | FIFO控制寄存器2 |
| FIFO_CTRL3 | r/w | 08 | 00 | FIFO控制寄存器3 |
| FIFO_CTRL4 | r/w | 09 | 00 | FIFO控制寄存器4 |
| FIFO_CTRL5 | r/w | 0A | 00 | FIFO控制寄存器5 |
| DRDY_PULSE_CFG_G | r/w | 0B | 00 | 陀螺仪数据就绪脉冲配置 |
| RESERVED | - | 0C | - | 保留 |
| INT1_CTRL | r/w | 0D | 00 | INT1中断控制寄存器 |
| INT2_CTRL | r/w | 0E | 00 | INT2中断控制寄存器 |
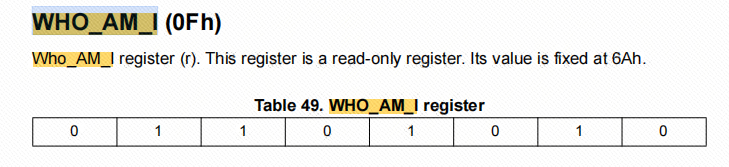
| WHO_AM_I | r | 0F | 6A | 设备ID寄存器(固定值0x6A) |
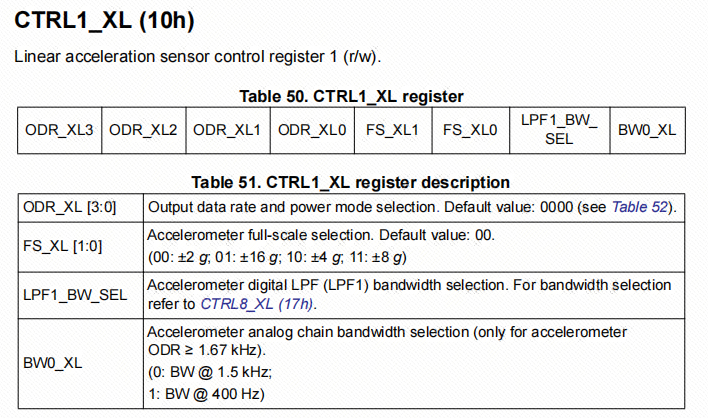
| CTRL1_XL | r/w | 10 | 00 | 加速度计控制寄存器1 |
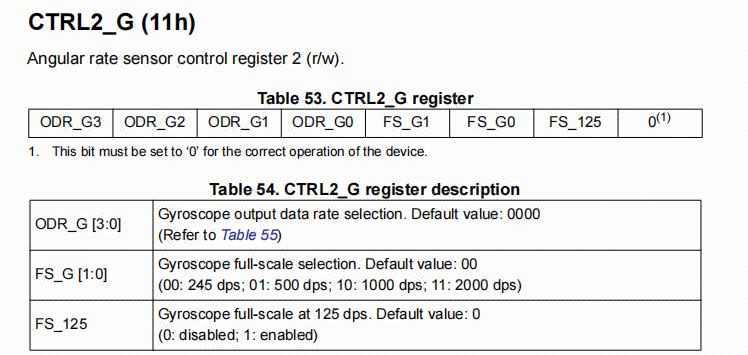
| CTRL2_G | r/w | 11 | 00 | 陀螺仪控制寄存器2 |
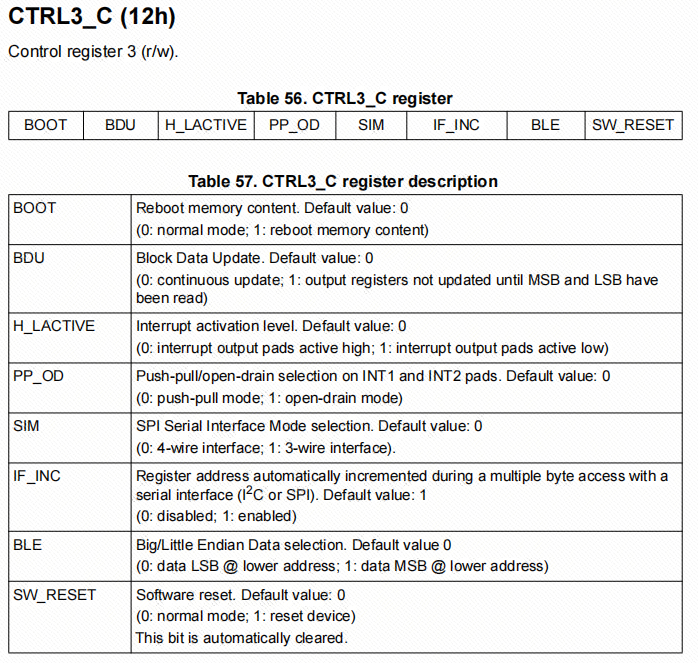
| CTRL3_C | r/w | 12 | 04 | 主控制寄存器3 |
| CTRL4_C | r/w | 13 | 00 | 主控制寄存器4 |
| CTRL5_C | r/w | 14 | 00 | 主控制寄存器5 |
| CTRL6_C | r/w | 15 | 00 | 主控制寄存器6 |
| CTRL7_G | r/w | 16 | 00 | 陀螺仪控制寄存器7 |
| CTRL8_XL | r/w | 17 | 00 | 加速度计控制寄存器8 |
| CTRL9_XL | r/w | 18 | 00 | 加速度计控制寄存器9 |
| CTRL10_C | r/w | 19 | 00 | 主控制寄存器10 |
| MASTER_CONFIG | r/w | 1A | 00 | I²C主配置寄存器 |
| WAKE_UP_SRC | r | 1B | - | 唤醒中断源状态寄存器 |
| TAP_SRC | r | 1C | - | 敲击中断源状态寄存器 |
| D6D_SRC | r | 1D | - | 6D方向检测中断源状态寄存器 |
| STATUS_REG | r | 1E | - | 用户接口状态数据寄存器 |
| RESERVED | - | 1F | - | 保留 |
| OUT_TEMP_L | r | 20 | - | 温度输出数据寄存器(低字节) |
| OUT_TEMP_H | r | 21 | - | 温度输出数据寄存器(高字节) |
| OUTX_L_G | r | 22 | - | 陀螺仪X轴输出数据(低字节) |
| OUTX_H_G | r | 23 | - | 陀螺仪X轴输出数据(高字节) |
| OUTY_L_G | r | 24 | - | 陀螺仪Y轴输出数据(低字节) |
| OUTY_H_G | r | 25 | - | 陀螺仪Y轴输出数据(高字节) |
| OUTZ_L_G | r | 26 | - | 陀螺仪Z轴输出数据(低字节) |
| OUTZ_H_G | r | 27 | - | 陀螺仪Z轴输出数据(高字节) |
| OUTX_L_XL | r | 28 | - | 加速度计X轴输出数据(低字节) |
| OUTX_H_XL | r | 29 | - | 加速度计X轴输出数据(高字节) |
| OUTY_L_XL | r | 2A | - | 加速度计Y轴输出数据(低字节) |
| OUTY_H_XL | r | 2B | - | 加速度计Y轴输出数据(高字节) |
| OUTZ_L_XL | r | 2C | - | 加速度计Z轴输出数据(低字节) |
| OUTZ_H_XL | r | 2D | - | 加速度计Z轴输出数据(高字节) |
| SENSORHUB1_REG | r | 2E | - | 传感器集线器输出寄存器1 |
| SENSORHUB2_REG | r | 2F | - | 传感器集线器输出寄存器2 |
| SENSORHUB3_REG | r | 30 | - | 传感器集线器输出寄存器3 |
| SENSORHUB4_REG | r | 31 | - | 传感器集线器输出寄存器4 |
| SENSORHUB5_REG | r | 32 | - | 传感器集线器输出寄存器5 |
| SENSORHUB6_REG | r | 33 | - | 传感器集线器输出寄存器6 |
| SENSORHUB7_REG | r | 34 | - | 传感器集线器输出寄存器7 |
| SENSORHUB8_REG | r | 35 | - | 传感器集线器输出寄存器8 |
| SENSORHUB9_REG | r | 36 | - | 传感器集线器输出寄存器9 |
| SENSORHUB10_REG | r | 37 | - | 传感器集线器输出寄存器10 |
| SENSORHUB11_REG | r | 38 | - | 传感器集线器输出寄存器11 |
| SENSORHUB12_REG | r | 39 | - | 传感器集线器输出寄存器12 |
| FIFO_STATUS1 | r | 3A | - | FIFO状态寄存器1(存储采样数低8位) |
| FIFO_STATUS2 | r | 3B | - | FIFO状态寄存器2(溢出/满标志) |
| FIFO_STATUS3 | r | 3C | - | FIFO状态寄存器3(保留) |
| FIFO_STATUS4 | r | 3D | - | FIFO状态寄存器4(水印/批处理标志) |
| FIFO_DATA_OUT_L | r | 3E | - | FIFO数据输出寄存器(低字节) |
| FIFO_DATA_OUT_H | r | 3F | - | FIFO数据输出寄存器(高字节) |
| TIMESTAMP0_REG | r | 40 | - | 时间戳输出寄存器(字节0) |
| TIMESTAMP1_REG | r | 41 | - | 时间戳输出寄存器(字节1) |
| TIMESTAMP2_REG | r/w | 42 | - | 时间戳输出寄存器(字节2,可读写) |
| RESERVED | - | 43-48 | - | 保留 |
| STEP_TIMESTAMP_L | r | 49 | - | 计步器时间戳寄存器(低字节) |
| STEP_TIMESTAMP_H | r | 4A | - | 计步器时间戳寄存器(高字节) |
| STEP_COUNTER_L | r | 4B | - | 计步器输出寄存器(低字节) |
| STEP_COUNTER_H | r | 4C | - | 计步器输出寄存器(高字节) |
| SENSORHUB13_REG | r | 4D | - | 传感器集线器输出寄存器13 |
| SENSORHUB14_REG | r | 4E | - | 传感器集线器输出寄存器14 |
| SENSORHUB15_REG | r | 4F | - | 传感器集线器输出寄存器15 |
| SENSORHUB16_REG | r | 50 | - | 传感器集线器输出寄存器16 |
| SENSORHUB17_REG | r | 51 | - | 传感器集线器输出寄存器17 |
| SENSORHUB18_REG | r | 52 | - | 传感器集线器输出寄存器18 |
| FUNC_SRC1 | r | 53 | - | 功能中断源寄存器1 |
| FUNC_SRC2 | r | 54 | - | 功能中断源寄存器2 |
| WRIST_TILT_IA | r | 55 | - | 手腕倾斜中断状态寄存器 |
| RESERVED | - | 56-57 | - | 保留 |
| TAP_CFG | r/w | 58 | 00 | 敲击中断配置寄存器 |
| TAP_THS_6D | r/w | 59 | 00 | 敲击阈值和6D方向检测配置 |
| INT_DUR2 | r/w | 5A | 00 | 中断持续时间配置 |
| WAKE_UP_THS | r/w | 5B | 00 | 唤醒阈值配置 |
| WAKE_UP_DUR | r/w | 5C | 00 | 唤醒持续时间配置 |
| FREE_FALL | r/w | 5D | 00 | 自由落体检测配置 |
| MD1_CFG | r/w | 5E | 00 | 主设备中断1配置 |
| MD2_CFG | r/w | 5F | 00 | 主设备中断2配置 |
| MASTER_CMD_CODE | r/w | 60 | 00 | 主设备命令代码寄存器 |
| SENS_SYNC_SPI_ERROR_CODE | r/w | 61 | 00 | SPI同步错误代码寄存器 |
| RESERVED | - | 62-65 | - | 保留 |
| OUT_MAG_RAW_X_L | r | 66 | - | 外部磁力计X轴原始数据(低字节) |
| OUT_MAG_RAW_X_H | r | 67 | - | 外部磁力计X轴原始数据(高字节) |
| OUT_MAG_RAW_Y_L | r | 68 | - | 外部磁力计Y轴原始数据(低字节) |
| OUT_MAG_RAW_Y_H | r | 69 | - | 外部磁力计Y轴原始数据(高字节) |
| OUT_MAG_RAW_Z_L | r | 6A | - | 外部磁力计Z轴原始数据(低字节) |
| OUT_MAG_RAW_Z_H | r | 6B | - | 外部磁力计Z轴原始数据(高字节) |
| RESERVED | - | 6C-72 | - | 保留 |
| X_OFS_USR | r/w | 73 | 00 | 加速度计X轴用户偏移校准 |
| Y_OFS_USR | r/w | 74 | 00 | 加速度计Y轴用户偏移校准 |
| Z_OFS_USR | r/w | 75 | 00 | 加速度计Z轴用户偏移校准 |
| RESERVED | - | 76-7F | - | 保留 |
类型说明
- r/w:可读写
- r:只读
- -:保留或无操作
关键说明
FIFO状态寄存器:
FIFO_STATUS1 和 FIFO_STATUS2 用于监控FIFO的存储状态(如采样数、溢出标志等)。
DIFF_FIFO 字段表示当前FIFO中存储的数据量(单位:字,每字7字节)。
时间戳与计步器:
时间戳寄存器(TIMESTAMPx_REG)记录传感器事件的精确时间。
计步器相关寄存器(STEP_COUNTER_L/H)输出步数和时间戳。
中断配置:
TAP_CFG 和 TAP_THS_6D 用于配置敲击检测的灵敏度和方向判断。
WAKE_UP_THS 和 FREE_FALL 与低功耗唤醒和自由落体检测相关。
传感器集线器:
SENSORHUBx_REG 用于扩展外部传感器(如磁力计)的数据采集。
在全部的寄存器中,我们关心的是:
| 寄存器名称 | 地址(HEX) | 功能 | 为什么关心它? |
|---|---|---|---|
| WHO_AM_I | 0F | 读取LSM6DS3TRC器件ID | 判断我们的设备是否正常,如果读不到或者数据不对说明有问题 |
| CTRL3_C | 12 | LSM6DS3TRC重置、块数据更新等寄存器 | 初始化使用 |
| CTRL1_XL | 10 | 设置加速度计的数据采样率 | 配置采样率 |
| CTRL2_G | 11 | 设置陀螺仪数据速率 | 配置速率 |
| CTRL8_XL | 17 | 设置加速度计输出数据率 | 配置速率 |
| STATUS_REG | 1E | 从状态寄存器获取数据状态 | 读取状态,在采样还是转换还是空闲 |
| OUTX_L_XL | 28 | 读取加速度计数据 | 获取加速度的原始数据 |
| OUTX_L_G | 22 | 读取陀螺仪数据 | 获取陀螺仪的原始数据 |
初始化流程
- 检测设备是否存在
 |
|---|
- 设备重置
 |
|---|
设置加速度采样率
设置陀螺仪采样率
设置加速度满量程
设置陀螺仪满量程
设置加速度模拟链带宽
软件校准(可选)
上电手动采集多次数据,然后取平均值。
单位换算
加速度单位
LSM6DS3 的加速度读取出来的默认单位是已 mg/LSB 为单位,我们如果要转换为单位 g,则:
加速度数据 = 轴原始数据 * Typ / 1000例如,±2g,则 加速度数据= 轴原始数据 * 0.061 (切换单位为mg)/ 1000(切换单位为g)
陀螺仪单位
LSM6DS3 的陀螺仪读取出来的默认单位是已 mdps/LSB 为单位,我们如果要转换为单位 dps,则:
角速度数据 = (pi / 180) * 轴原始数据 * Typ / 1000例如,±2000,则 加速度数据= (pi / 180) * 轴原始数据 * 70 (切换单位为mbps)/ 1000(切换单位为bps)
代码编写
基于以上的数据手册中的关键信息,将其转换为代码。在 hw_lsm6ds3.h 中编写以下代码:
#ifndef HW_LSM6DS3_H
#define HW_LSM6DS3_H
#include "board.h"
/************************ 陀螺仪 ************************/
#define LSM6DS3TRC_I2CADDR 0x6A//SA0接GND,如果接的是VCC,则地址是0x6B
#define LSM6DS3TRC_WHO_AM_I 0x0F //Who am I
#define LSM6DS3TRC_CTRL3_C 0x12
//加速度计控制寄存器
#define LSM6DS3TRC_CTRL1_XL 0x10
//线性加速输出数据速率
#define LSM6DS3TRC_ACC_RATE_0 0x00
#define LSM6DS3TRC_ACC_RATE_1HZ6 0xB0
#define LSM6DS3TRC_ACC_RATE_12HZ5 0x10
#define LSM6DS3TRC_ACC_RATE_26HZ 0x20
#define LSM6DS3TRC_ACC_RATE_52HZ 0x30
#define LSM6DS3TRC_ACC_RATE_104HZ 0x40
#define LSM6DS3TRC_ACC_RATE_208HZ 0x50
#define LSM6DS3TRC_ACC_RATE_416HZ 0x60
#define LSM6DS3TRC_ACC_RATE_833HZ 0x70
#define LSM6DS3TRC_ACC_RATE_1660HZ 0x80
#define LSM6DS3TRC_ACC_RATE_3330HZ 0x90
#define LSM6DS3TRC_ACC_RATE_6660HZ 0xA0
//陀螺仪控制寄存器
#define LSM6DS3TRC_CTRL2_G 0x11
//线性陀螺仪输出数据速率
#define LSM6DS3TRC_GYR_RATE_0 0x00
#define LSM6DS3TRC_GYR_RATE_1HZ6 0xB0
#define LSM6DS3TRC_GYR_RATE_12HZ5 0x10
#define LSM6DS3TRC_GYR_RATE_26HZ 0x20
#define LSM6DS3TRC_GYR_RATE_52HZ 0x30
#define LSM6DS3TRC_GYR_RATE_104HZ 0x40
#define LSM6DS3TRC_GYR_RATE_208HZ 0x50
#define LSM6DS3TRC_GYR_RATE_416HZ 0x60
#define LSM6DS3TRC_GYR_RATE_833HZ 0x70
#define LSM6DS3TRC_GYR_RATE_1660HZ 0x80
#define LSM6DS3TRC_GYR_RATE_3330HZ 0x90
#define LSM6DS3TRC_GYR_RATE_6660HZ 0xA0
//加速度计全量程
#define LSM6DS3TRC_ACC_FSXL_2G 0x00
#define LSM6DS3TRC_ACC_FSXL_16G 0x04
#define LSM6DS3TRC_ACC_FSXL_4G 0x08
#define LSM6DS3TRC_ACC_FSXL_8G 0x0C
//陀螺仪全量程
#define LSM6DS3TRC_GYR_FSG_245 0x00
#define LSM6DS3TRC_GYR_FSG_500 0x04
#define LSM6DS3TRC_GYR_FSG_1000 0x08
#define LSM6DS3TRC_GYR_FSG_2000 0x0C
#define LSM6DS3TRC_CTRL1_XL 0x10
//加速度计的模拟链带宽
#define LSM6DS3TRC_ACC_BW0XL_1500HZ 0x00
#define LSM6DS3TRC_ACC_BW0XL_400HZ 0x01
#define LSM6DS3TRC_CTRL8_XL 0x17
//加速度计带宽选择
//低通滤波器
#define LSM6DS3TRC_ACC_LOW_PASS_ODR_50 0x88
#define LSM6DS3TRC_ACC_LOW_PASS_ODR_100 0xA8
#define LSM6DS3TRC_ACC_LOW_PASS_ODR_9 0xC8
#define LSM6DS3TRC_ACC_LOW_PASS_ODR_400 0xE8
//高通滤波器
#define LSM6DS3TRC_ACC_HIGH_PASS_ODR_50 0x04
#define LSM6DS3TRC_ACC_HIGH_PASS_ODR_100 0x24
#define LSM6DS3TRC_ACC_HIGH_PASS_ODR_9 0x44
#define LSM6DS3TRC_ACC_HIGH_PASS_ODR_400 0x64
//用户界面的状态数据寄存器
#define LSM6DS3TRC_STATUS_REG 0x1E
#define LSM6DS3TRC_STATUS_GYROSCOPE 0x02
#define LSM6DS3TRC_STATUS_ACCELEROMETER 0x01
//加速度计输出接口XYZ
#define LSM6DS3TRC_OUTX_L_XL 0x28
#define LSM6DS3TRC_OUTX_H_XL 0x29
#define LSM6DS3TRC_OUTY_L_XL 0x2A
#define LSM6DS3TRC_OUTY_H_XL 0x2B
#define LSM6DS3TRC_OUTZ_L_XL 0x2C
#define LSM6DS3TRC_OUTZ_H_XL 0x2D
//陀螺仪输出接口XYZ
#define LSM6DS3TRC_OUTX_L_G 0x22
#define LSM6DS3TRC_OUTX_H_G 0x23
#define LSM6DS3TRC_OUTY_L_G 0x24
#define LSM6DS3TRC_OUTY_H_G 0x25
#define LSM6DS3TRC_OUTZ_L_G 0x26
#define LSM6DS3TRC_OUTZ_H_G 0x27
//四元素
typedef struct {
float x;
float y;
float z;
float w;
} Quaternion;
//欧拉角
typedef struct {
float x;
float y;
float z;
} Angle;
extern Angle angle;
extern Quaternion quaternion;
uint8_t lsm6ds3_init(void);
void lsm6ds3_angle_return_zero(void);
void lsm6ds3_get_angle(Angle* angle);
void lsm6ds3_getAngle(Angle* angle);
void float_to_string(float num, char *str);
#endif在 hw_lsm6ds3.c 中编写以下代码:
#include "hw_lsm6ds3.h"
#include "bsp_i2c.h"
#include <stdio.h>
#include <string.h>
#include <math.h>
Angle angle;
Quaternion quaternion;
//积分时间20ms
//多少秒采集一次陀螺仪时间就填入多少秒
const static float dt = 0.02f;
//陀螺仪yaw角软件校准值
static float gyro_zero_z = 0.0f;
//实现自己的毫秒延时
static void delay_syms(long X)
{
while(X--)
{
DEVICE_DELAY_US(1000);
}
}
/*******************************************************************************
* 函数名:LSM6DS3TRC_ReadOneByte
* 描述 :从LSM6DS3TRC指定地址处开始读取一个字节数据
* 输入 :reg_addr地址
* 输出 :读取的数据dat
*******************************************************************************/
uint8_t lsm6ds3_read_one_byte(uint8_t reg_addr)
{
uint8_t dat = 0;
i2c_start();//发送起始信号
i2c_send_byte((LSM6DS3TRC_I2CADDR<<1) | 0x00);//从设备地址
delay_syms(1);
if(i2c_wait_ack()) // 检测设备的ACK应答
{
i2c_stop();//产生一个停止条件
}
i2c_send_byte(reg_addr);//寄存器地址
delay_syms(1);
if(i2c_wait_ack()) // 检测设备的ACK应答
{
i2c_stop();//产生一个停止条件
}
i2c_start();//发送重复起始信号,准备读取数据
i2c_send_byte((LSM6DS3TRC_I2CADDR<<1) | 0x01);//从设备地址(读取模式)
delay_syms(1);
if(i2c_wait_ack()) // 检测设备的ACK应答
{
i2c_stop();//产生一个停止条件
}
dat = i2c_read_byte_ack(0);
i2c_stop();//发送停止信号
return dat;
}
/*******************************************************************************
* 函数名:lsm6ds3_ReadCommand
* 描述 :对LSM6DS3TRC读取数据
* 输入 :uint8_t reg_addr, uint8_t *rev_data, uint8_t length
* 输出 :void
*******************************************************************************/
void lsm6ds3_read_command(uint8_t reg_addr, uint8_t *rev_data, uint8_t length)
{
while(length)
{
*rev_data++ = lsm6ds3_read_one_byte(reg_addr++);
length--;
}
}
/*******************************************************************************
* 函数名:lsm6ds3_WriteCommand
* 描述 :往LSM6DS3TRC写入命令
* 输入 :uint8_t reg_addr, uint8_t *send_data, uint16_t length
* 输出 :void
*******************************************************************************/
void lsm6ds3_write_command(uint8_t reg_addr, uint8_t *send_data, uint16_t length)
{
i2c_start();
delay_syms(10);
i2c_send_byte((LSM6DS3TRC_I2CADDR<<1) | 0x00);//发送设备地址
if(i2c_wait_ack()) // 检测设备的ACK应答
{
i2c_stop();//产生一个停止条件
}
delay_syms(10);
i2c_send_byte(reg_addr);//发送寄存器地址
delay_syms(10);
if(i2c_wait_ack()) // 检测设备的ACK应答
{
i2c_stop();//产生一个停止条件
}
delay_syms(10);
i2c_send_byte(*send_data);//发送数据
delay_syms(10);
if(i2c_wait_ack()) // 检测设备的ACK应答
{
i2c_stop();//产生一个停止条件
}
delay_syms(10);
i2c_stop();//产生一个停止条件
}
/*******************************************************************************
* 函数名:IIC_CheckDevice
* 描述 :检测I2C总线设备,CPU向发送设备地址,然后读取设备应答来判断该设备是否存在
* 输入 :_Address:设备的I2C总线地址
*******************************************************************************/
uint8_t i2c_check_device(uint8_t _Address)
{
uint8_t ucAck;
i2c_start(); // 发送启动信号
i2c_send_byte(_Address );
ucAck = i2c_wait_ack(); // 检测设备的ACK应答
i2c_stop(); // 发送停止信号
return ucAck;
}
/*******************************************************************************
* 函数名:lsm6ds3_CheckOk
* 描述 :判断LSM6DS3TRC是否正常
* 输出 : 1 表示正常, 0 表示不正常
*******************************************************************************/
uint8_t lsm6ds3_check_ok(void)
{
if(i2c_check_device( LSM6DS3TRC_I2CADDR ) == 1)
{
//printf("Device exist\r\n");
return 1;
}
else
{
// 失败后,切记发送I2C总线停止信号
//printf("Device not exist\r\n");
i2c_stop();
return 0;
}
}
/*******************************************************************************
* 函数名:lsm6ds3_GetChipID
* 描述 :读取LSM6DS3TRC器件ID
* 输出 :返回值true表示0x6a,返回false表示不是0x6a
*******************************************************************************/
uint8_t lsm6ds3_get_Chip_id(void)
{
uint8_t buf = 0;
lsm6ds3_read_command(LSM6DS3TRC_WHO_AM_I, &buf, 1);//Who I am ID
//printf("buf 0x%02X\r\n",buf);
if (buf == 0x6a)
{
//printf("ID ok\r\n");
return 1;
}
else
{
//printf("ID error\r\n");
return 0;
}
}
/*******************************************************************************
* 函数名:lsm6ds3_Reset
* 描述 :LSM6DS3TRC重启和重置寄存器
*******************************************************************************/
void lsm6ds3_reset(void)
{
uint8_t buf[1] = {0};
//reboot modules
buf[0] = 0x80;
lsm6ds3_write_command(LSM6DS3TRC_CTRL3_C, buf, 1);//BOOT->1
delay_syms(15);
//reset register
lsm6ds3_read_command(LSM6DS3TRC_CTRL3_C, buf, 1);//读取SW_RESET状态
buf[0] |= 0x01;
lsm6ds3_write_command(LSM6DS3TRC_CTRL3_C, buf, 1);//将CTRL3_C寄存器的SW_RESET位设为1
while (buf[0] & 0x01)
lsm6ds3_read_command(LSM6DS3TRC_CTRL3_C, buf, 1);//等到CTRL3_C寄存器的SW_RESET位返回0
}
/*******************************************************************************
* 函数名:lsm6ds3_Set_BDU
* 描述 :LSM6DS3TRC设置块数据更新
* 输入 :uint8_t flag=1启动 0禁用
*******************************************************************************/
void lsm6ds3_set_BDU(uint8_t flag)
{
uint8_t buf[1] = {0};
lsm6ds3_read_command(LSM6DS3TRC_CTRL3_C, buf, 1);
if (flag == 1)
{
buf[0] |= 0x40;//启用BDU
lsm6ds3_write_command(LSM6DS3TRC_CTRL3_C, buf, 1);
}
else
{
buf[0] &= 0xbf;//禁用BDU
lsm6ds3_write_command(LSM6DS3TRC_CTRL3_C, buf, 1);
}
lsm6ds3_read_command(LSM6DS3TRC_CTRL3_C, buf, 1);
}
/*******************************************************************************
* 函数名:lsm6ds3_Set_Accelerometer_Rate
* 描述 :LSM6DS3TRC设置加速度计的数据采样率
* 输入 :uint8_t rate
*******************************************************************************/
void lsm6ds3_set_accelerometer_rate(uint8_t rate)
{
uint8_t buf[1] = {0};
lsm6ds3_read_command(LSM6DS3TRC_CTRL1_XL, buf, 1);
buf[0] |= rate;//设置加速度计的数据采样率
lsm6ds3_write_command(LSM6DS3TRC_CTRL1_XL, buf, 1);
}
/*******************************************************************************
* 函数名:lsm6ds3_Set_Gyroscope_Rate
* 描述 :LSM6DS3TRC设置陀螺仪数据速率
* 输入 :uint8_t rate
*******************************************************************************/
void lsm6ds3_set_gyroscope_rate(uint8_t rate)
{
uint8_t buf[1] = {0};
lsm6ds3_read_command(LSM6DS3TRC_CTRL2_G, buf, 1);
buf[0] |= rate;//设置陀螺仪数据速率
lsm6ds3_write_command(LSM6DS3TRC_CTRL2_G, buf, 1);
}
/*******************************************************************************
* 函数名:lsm6ds3_Set_Accelerometer_Fullscale
* 描述 :LSM6DS3TRC加速度计满量程选择
* 输入 :uint8_t value
*******************************************************************************/
void lsm6ds3_set_accelerometer_fullscale(uint8_t value)
{
uint8_t buf[1] = {0};
lsm6ds3_read_command(LSM6DS3TRC_CTRL1_XL, buf, 1);
buf[0] |= value;//设置加速度计的满量程
lsm6ds3_write_command(LSM6DS3TRC_CTRL1_XL, buf, 1);
}
/*******************************************************************************
* 函数名:lsm6ds3_Set_Gyroscope_Fullscale
* 描述 :LSM6DS3TRC陀螺仪满量程选择
* 输入 :uint8_t value
*******************************************************************************/
void lsm6ds3_set_gyroscope_fullscale(uint8_t value)
{
uint8_t buf[1] = {0};
lsm6ds3_read_command(LSM6DS3TRC_CTRL2_G, buf, 1);
buf[0] |= value;//设置陀螺仪的满量程
lsm6ds3_write_command(LSM6DS3TRC_CTRL2_G, buf, 1);
}
/*******************************************************************************
* 函数名:LSM6DS3TRC_Set_Accelerometer_Bandwidth
* 描述 :LSM6DS3TRC设置加速度计模拟链带宽
* 输入 :uint8_t BW0XL, uint8_t ODR
* 备注 :BW0XL模拟链带宽, ODR输出数据率
*******************************************************************************/
void lsm6ds3_set_accelerometer_bandwidth(uint8_t BW0XL, uint8_t ODR)
{
uint8_t buf[1] = {0};
lsm6ds3_read_command(LSM6DS3TRC_CTRL1_XL, buf, 1);
buf[0] |= BW0XL;
lsm6ds3_write_command(LSM6DS3TRC_CTRL1_XL, buf, 1);
lsm6ds3_read_command(LSM6DS3TRC_CTRL8_XL, buf, 1);
buf[0] |= ODR;
lsm6ds3_write_command(LSM6DS3TRC_CTRL8_XL, buf, 1);
}
/*******************************************************************************
* 函数名:LSM6DS3TRC_Get_Status
* 描述 :从LSM6DS3TRC状态寄存器获取数据状态
*******************************************************************************/
uint8_t lsm6ds3_get_status(void)
{
uint8_t buf[1] = {0};
lsm6ds3_read_command(LSM6DS3TRC_STATUS_REG, buf, 1);
return buf[0];
}
/*******************************************************************************
* 函数名:LSM6DS3TRC_Get_Acceleration
* 描述 :从LSM6DS3TRC读取加速度计数据
* 输入 :uint8_t fsxl, float *acc_float
* 备注 :转换为浮点数的加速度值
*******************************************************************************/
void lsm6ds3_get_acceleration(uint8_t fsxl, float *acc_float)
{
uint8_t buf[6];
int16_t acc[3];
lsm6ds3_read_command(LSM6DS3TRC_OUTX_L_XL, buf, 6);//获取加速度计原始数据
acc[0] = buf[1] << 8 | buf[0];
acc[1] = buf[3] << 8 | buf[2];
acc[2] = buf[5] << 8 | buf[4];
switch (fsxl)//根据不同量程来选择输出的数据的转换系数
{
case LSM6DS3TRC_ACC_FSXL_2G:
acc_float[0] = ((float)acc[0] * 0.061f);
acc_float[1] = ((float)acc[1] * 0.061f);
acc_float[2] = ((float)acc[2] * 0.061f);
break;
case LSM6DS3TRC_ACC_FSXL_16G:
acc_float[0] = ((float)acc[0] * 0.488f);
acc_float[1] = ((float)acc[1] * 0.488f);
acc_float[2] = ((float)acc[2] * 0.488f);
break;
case LSM6DS3TRC_ACC_FSXL_4G:
acc_float[0] = ((float)acc[0] * 0.122f);
acc_float[1] = ((float)acc[1] * 0.122f);
acc_float[2] = ((float)acc[2] * 0.122f);
break;
case LSM6DS3TRC_ACC_FSXL_8G:
acc_float[0] = ((float)acc[0] * 0.244f);
acc_float[1] = ((float)acc[1] * 0.244f);
acc_float[2] = ((float)acc[2] * 0.244f);
break;
}
}
/*******************************************************************************
* 函数名:LSM6DS3TRC_Get_Gyroscope
* 描述 :从LSM6DS3TRC读取陀螺仪数据
* 输入 :uint8_t fsg, float *gry_float
* 备注 :转换为浮点数的角速度值
*******************************************************************************/
void lsm6ds3_get_gyroscope(uint8_t fsg, float *gry_float)
{
uint8_t buf[6];
int16_t gry[3];
lsm6ds3_read_command(LSM6DS3TRC_OUTX_L_G, buf, 6);//获取陀螺仪原始数据
gry[0] = buf[1] << 8 | buf[0];
gry[1] = buf[3] << 8 | buf[2];
gry[2] = buf[5] << 8 | buf[4];
switch (fsg)//根据不同量程来选择输出的数据的转换系数
{
case LSM6DS3TRC_GYR_FSG_245:
gry_float[0] = ((float)gry[0] * 8.750f);
gry_float[1] = ((float)gry[1] * 8.750f);
gry_float[2] = ((float)gry[2] * 8.750f);
break;
case LSM6DS3TRC_GYR_FSG_500:
gry_float[0] = ((float)gry[0] * 17.50f);
gry_float[1] = ((float)gry[1] * 17.50f);
gry_float[2] = ((float)gry[2] * 17.50f);
break;
case LSM6DS3TRC_GYR_FSG_1000:
gry_float[0] = ((float)gry[0] * 35.00f);
gry_float[1] = ((float)gry[1] * 35.00f);
gry_float[2] = ((float)gry[2] * 35.00f);
break;
case LSM6DS3TRC_GYR_FSG_2000:
gry_float[0] = ((float)gry[0] * 70.00f);
gry_float[1] = ((float)gry[1] * 70.00f);
gry_float[2] = ((float)gry[2] * 70.00f);
break;
}
}
/*******************************************************************************
* 函数名:lsm6ds3_soft_calibrate_z0
* 描述 :传感器校准
* 备注 :上电前用,减小Z零点漂移
*******************************************************************************/
static void lsm6ds3_soft_calibrate_z0(void)
{
uint16_t calibration_samples = 500;//校准采样数
float gz_sum = 0.0f;
int16_t GyroZ;
uint8_t buf[2]={0};
uint16_t i;
uint8_t status = 0;
for (i = 0; i < calibration_samples; i++)
{
///////////根据Z轴的变换规律进行修正/////////
status = lsm6ds3_get_status();
if( status & LSM6DS3TRC_STATUS_GYROSCOPE )
{
// 读取Z轴数据
lsm6ds3_read_command(LSM6DS3TRC_OUTZ_L_G, buf, 2);
GyroZ = buf[1] << 8 | buf[0];
gz_sum += (float)GyroZ;
}
delay_syms(20);//要和dt同步
}
gyro_zero_z = gz_sum / calibration_samples;
}
// 卡尔曼滤波器结构体
typedef struct {
float q; // 过程噪声协方差
float r; // 测量噪声协方差
float x; // 状态估计值
float p; // 估计误差协方差
float k; // 卡尔曼增益
} MPU6050_KalmanFilter;
//定义三个欧拉角的滤波体
MPU6050_KalmanFilter kf_roll, kf_pitch, kf_yaw;
/*******************************************************************************
* 函数名:LSM6DS3TRC_Get_Gyroscope
* 描述 :卡尔曼滤波更新函数
* 输入 :kf 开发板滤波的结构体变量地址 measurement滤波前的参数
* 返回 :滤波后的参数
*******************************************************************************/
static float KalmanFilter_Update(MPU6050_KalmanFilter *kf, float measurement)
{
// 预测步骤
kf->p = kf->p + kf->q;
// 计算卡尔曼增益
kf->k = kf->p / (kf->p + kf->r);
// 更新估计值
kf->x = kf->x + kf->k * (measurement - kf->x);
// 更新估计误差协方差
kf->p = (1 - kf->k) * kf->p;
return kf->x;
}
//卡尔曼滤波参数初始化
static void KalmanFilter_init(void)
{
//roll的初始化
kf_roll.q = 0.02f;
kf_roll.r = 0.1f;
kf_roll.x = 0;
kf_roll.p = 1;
//Pitch的初始化
kf_pitch.q = 0.02f;
kf_pitch.r = 0.1f;
kf_pitch.x = 0;
kf_pitch.p = 1;
//yaw的初始化
kf_yaw.q = 0.02f;
kf_yaw.r = 0.1f;
kf_yaw.x = 0;
kf_yaw.p = 1;
}
float acc[3] = {0,0,0};
float gyr[3] = {0,0,0};
float Kp=130.0f;
float Ki=0.005f;
float halfT=0.001f;
float q0=1, q1 = 0, q2 = 0, q3 = 0;
float exInt = 0, eyInt = 0, ezInt = 0;
//如yaw值偏移逐渐加大,则加大该值
//如yaw值偏移逐渐减小,则减小该值
float z_offset = 0.1034f; //yaw轴手动偏移
//获取原始数据并转换为欧拉角
//参数angle 为传入的角度结构体
void lsm6ds3_get_angle(Angle* angle)
{
int i = 0;
uint8_t status = 0;
float norm;
float vx,vy,vz;
float ex,ey,ez;
//获取传感器状态
status = lsm6ds3_get_status();
if( (status&LSM6DS3TRC_STATUS_ACCELEROMETER) && (status&LSM6DS3TRC_STATUS_GYROSCOPE) )
{
//获取加速度原始数据
lsm6ds3_get_acceleration(LSM6DS3TRC_ACC_FSXL_2G, acc);
//单位换算
for( i = 0; i < 3; i++ )
{
acc[i] = acc[i] / 1000.0f;
}
//获取陀螺仪原始数据
lsm6ds3_get_gyroscope(LSM6DS3TRC_GYR_FSG_2000, gyr);
//单位换算
for( i = 0; i < 3; i++ )
{
//Z轴应用软件校准值
if( i == 2 )
{
gyr[i] = gyr[i] - (int16_t)gyro_zero_z;
}
gyr[i] = gyr[i] /1000.0f;
}
//测量正常化,三维向量变为单位向量
norm = sqrt(acc[0]*acc[0] + acc[1]*acc[1] + acc[2]*acc[2]);
acc[0] = acc[0] / norm;//单位化
acc[1] = acc[1] / norm;
acc[2] = acc[2] / norm;
//估计方向的重力
vx = 2* (q1*q3 - q0*q2);
vy = 2* (q0*q1 + q2*q3);
vz = q0*q0 - q1*q1 - q2*q2 + q3*q3;
ex = (acc[1]*vz - acc[2]*vy);
ey = (acc[2]*vx - acc[0]*vz);
ez = (acc[0]*vy - acc[1]*vx);
//积分误差比例积分增益
exInt = exInt + ex*Ki;
eyInt = eyInt + ey*Ki;
ezInt = ezInt + ez*Ki;
//调整后的陀螺仪测量
gyr[0] = gyr[0] + Kp*ex + exInt;
gyr[1] = gyr[1] + Kp*ey + eyInt;
gyr[2] = gyr[2] + Kp*ez + ezInt;
//整合四元数率和正常化
q0 = q0 + (-q1*gyr[0] - q2*gyr[1]- q3*gyr[2])*halfT;
q1 = q1 + (q0*gyr[0] + q2*gyr[2] - q3*gyr[1])*halfT;
q2 = q2 + (q0*gyr[1] - q1*gyr[2] + q3*gyr[0])*halfT;
q3 = q3 + (q0*gyr[2] + q1*gyr[1] - q2*gyr[0])*halfT;
//正常化四元数
norm= sqrt(q0*q0+ q1*q1+ q2*q2+ q3*q3);
//四元素
q0 = q0 / norm;//w
q1 = q1 / norm;//x
q2 = q2 / norm;//y
q3 = q3 / norm;//z
angle->x = KalmanFilter_Update(&kf_roll, asin(2 * q2 * q3 + 2 * q0 * q1 ) * 57.3);
angle->y =KalmanFilter_Update(&kf_pitch, atan2(-2 * q1 * q3 + 2 * q0 * q2, q0*q0-q1*q1-q2*q2+q3*q3)*57.3);
gyr[2] = KalmanFilter_Update(&kf_yaw, gyr[2] * dt);
//如参数小于预期请加大3.0f
//如参数大于预期请减小3.0f
angle->z += gyr[2] * 3.0f + z_offset;
}
}
/*******************************************************************************
* 函数名:lsm6ds3_angle_return_zero
* 描述 :角度归零初始化
*******************************************************************************/
void lsm6ds3_angle_return_zero(void)
{
angle.x = 0;
angle.y = 0;
angle.z = 0;
lsm6ds3_reset();
}
/*******************************************************************************
* 函数名:传感器初始化
* 描述 :lsm6ds3_init
*******************************************************************************/
uint8_t lsm6ds3_init(void)
{
//检测设备是否存在
if( lsm6ds3_check_ok() == 0 ) return 1;
//设备重启
lsm6ds3_reset();
//在读取MSB和LSB之前不更新输出寄存器
lsm6ds3_set_BDU(1);
//设置加速度计的数据采样率 1/52=19.2ms
lsm6ds3_set_accelerometer_rate(LSM6DS3TRC_ACC_RATE_52HZ);
//设置陀螺仪的数据采样率 1/52=19.2ms
lsm6ds3_set_gyroscope_rate(LSM6DS3TRC_GYR_RATE_52HZ);
//设置加速度计满量程选择
lsm6ds3_set_accelerometer_fullscale(LSM6DS3TRC_ACC_FSXL_2G);
//设置陀螺仪全量程选择
lsm6ds3_set_gyroscope_fullscale(LSM6DS3TRC_GYR_FSG_2000);
//设置加速度计模拟链带宽
lsm6ds3_set_accelerometer_bandwidth(LSM6DS3TRC_ACC_BW0XL_400HZ, LSM6DS3TRC_ACC_LOW_PASS_ODR_100);
delay_syms(100);
//软件校准,减少yaw的零点漂移
//lsm6ds3_soft_calibrate_z0();
//卡尔曼滤波初始化
KalmanFilter_init();
return 0;
}其他配置
因为我们要看到陀螺仪的实际效果,可以通过串口调试工具 Vofa+ 查看波形数据与3D角度数据。所以我们还需要配置一个串口。
 | 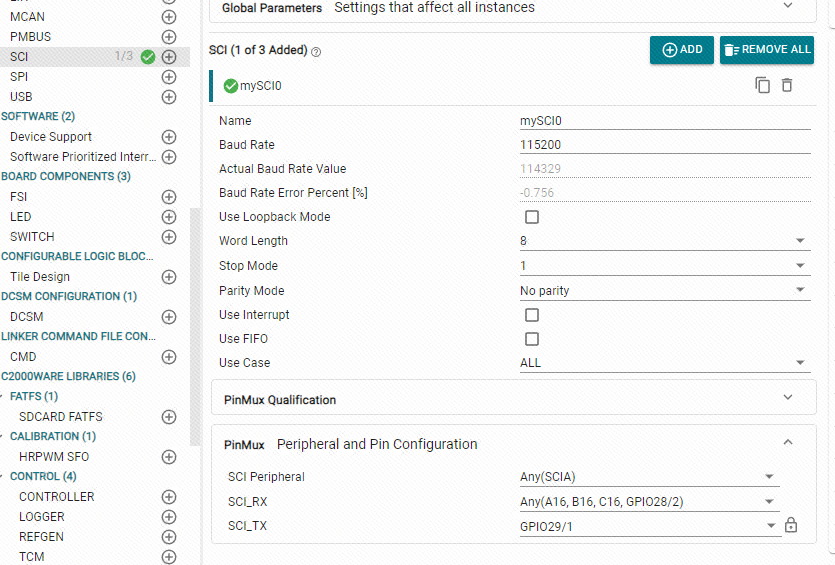 |
|---|---|
在hardware文件夹下再新建两个文件,分别是 hw_uart.c 和 hw_uart.h。
往 hw_uart.c 写入以下代码:
#include "hw_uart.h"
#include <string.h>
#include <stdio.h>
//发送单个字节
void uart0_sendChar(char ch)
{
while( SCI_isTransmitterBusy(mySCI0_BASE) != false);
SCI_writeCharNonBlocking(mySCI0_BASE, ch);
}
//发送字符串
void uart0_sendString(char* str)
{
while(*str!=0 && str != 0)
{
uart0_sendChar(*str++);
}
}往 hw_uart.h 写入以下代码:
#ifndef HW_UART_H
#define HW_UART_H
#include "driverlib.h"
#include "device.h"
#include "board.h"
void uart0_sendChar(char ch);
void uart0_sendString(char* str);
#endif案例验证
更新主函数代码
更新工程的 empty_driverlib_main.c 文件为以下代码:
#include "driverlib.h"
#include "device.h"
#include "board.h"
#include "c2000ware_libraries.h"
#include "hw_uart.h"
#include "hw_lsm6ds3.h"
#include "stdio.h"
#include <math.h>
#include <stdlib.h>
#include <string.h>
//浮点转字符串
//只转换小数点后两位
void float_to_str(float num, char* output)
{
int num_int = 0;
int point1;
int point2;
num_int = num * 100;
point1 = num_int/10%10;
point2 = num_int%10;
num_int = num_int/100;
if( point2 < 0 ) point2=-point2;
if( point1 < 0 ) point1=-point1;
sprintf(output, "%d.%d%d",num_int, point1, point2);
}
void main(void)
{
char x[20]={0},y[20]={0},z[20]={0},bufs[50]={0};
Device_init();
Device_initGPIO();
Interrupt_initModule();
Interrupt_initVectorTable();
Board_init();
C2000Ware_libraries_init();
EINT;
ERTM;
// 陀螺仪初始化
lsm6ds3_init();
while(1)
{
//获取欧拉角
lsm6ds3_get_angle(&angle);
//将欧拉角的浮点型数据转换字符串
float_to_str(angle.x,x);
float_to_str(angle.y,y);
float_to_str(angle.z,z);
//格式化字符串
sprintf(bufs,"xyz: %s,%s,%s\r\n",x,y,z);
//串口发送字符串
uart0_sendString(bufs);
DEVICE_DELAY_US(15000);
}
}下载器连接
| XDS110下载器 | 开发板 |
|---|---|
| SWD | SWD/TMS |
| CLK | CLK/TCK |
| TXD | RX |
| RXD | TX |
| GND | GND |
| 5V | 5V |
代码烧录
GIF 动图
案例现象
使用vofa+ 显示串口的数据,同时调用vofa+的3D控件显示3D效果,波形控件显示3个轴的效果。
 |
|---|