US-016是市场上唯有的一款模拟量输出的超声波测距模块,输出的模拟电压和距离值成正比,可以方便的和其他系统相连,US-016工作稳定可靠。
US-016超声波测距模块可实现2cm~3m的非接触测距功能,供电电压为5V,工作电流为3.8mA,支持模拟电压输出,工作稳定可靠。本模块根据不同应用场景可设置成不同的量程(大测量距离分别为1m和3m);当Range管脚悬空时,量程为3m。US-016能将测量距离转化为模拟电压输出,输出电压值与测量距离成正比。
一、模块来源
二、规格参数
工作电压:3.3V-5V
工作电流:3.8MA
感应角度:小于15度
探测距离:2CM-300CM
探测精度:0.3CM+1%
输出方式: 模拟电压
管脚数量:4 Pin
以上信息见厂家资料文件
三、移植过程
我们的目标是将例程移植至MSPM0G3507开发板上【能够判断前方障碍物距离的功能】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
1、查看资料
模块上电后,系统首先判断 Range 引脚的输入电平,根据输入电平状态来设置不同的量程。当 Range 引脚为高电平时,量程为 3m,当 Range 管脚为低电平时,量程为 1m。然后,系统开始连续测距,同时将测距结果通过模拟电压在 Out 管脚输出。当距离变化时,模拟电压也会随之进行变化。模拟电压与测量距离成正比,模拟电压的输出范围是0~Vcc。
- 当系统量程为 1m 时,测量距离为:L = 1024*Vout/Vcc(mm)。当输出电压为 0V 对应距离为 0m,输出 Vcc 对应为 1.024m。
- 当系统量程为 3m 时,测量距离为:L = 3096*Vout/Vcc(mm)。 当输出电压为 0V 对应距离为 0m,输出 Vcc 对应为 3.072m。
2、引脚选择
这里选择使用PA27的附加ADC功能。
| VCC | 3V3 |
| GND | GND |
| Range | NC(不接) |
| Out | PA27 |
接下来我们配置 SYSCONFIG
- 双击 empty.syscfg 文件,打开它。
- 添加ADC
- 配置ADC
Ctrl + S保存配置文件然后点击编译(可能会报错,我们不用管!)
- 然后我们所有设定的引脚和功能就会在 ti_msp_dl_config.h 中定义。因为这个文件我们包含进了 board.h 所以我们只需要引用 board.h 即可。【这里的 board.h 就充当了芯片头文件的作用】
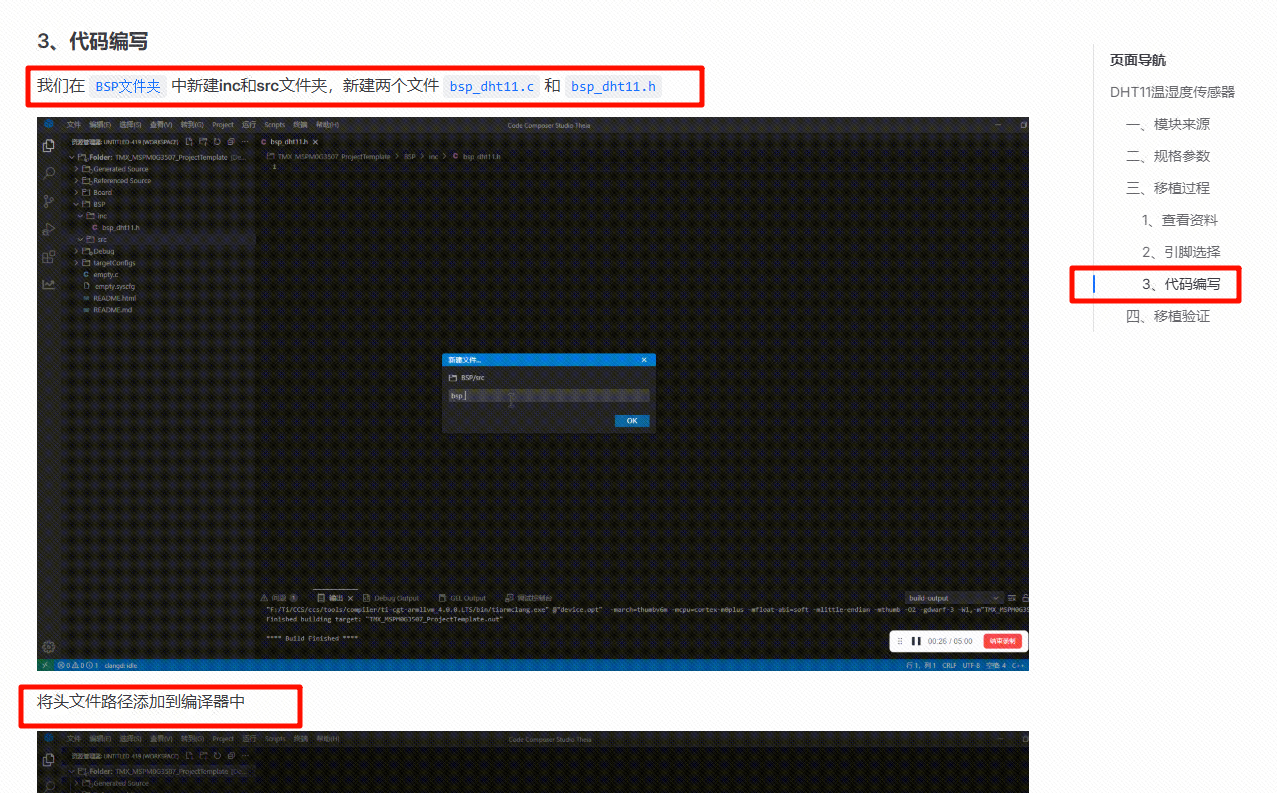
3、代码编写
我们在 BSP文件夹 中新建inc和src文件夹,新建两个文件 bsp_us016.c 和 bsp_us016.h,并且将头文件路径添加到编译器中。
在文件bsp_us016.c中,编写如下代码。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#include "bsp_us016.h"
#include "board.h"
#include "stdio.h"
// 超声波量程 Range接地量程为1 Range接VCC量程为3 浮空量程为3
// 测试时,Range浮空,故量程为3
#define RANGE 0 /* [0]则量程为3米 [1]则量程为1米 */
/**********************************************************
* 函 数 名 称:ADC_GET
* 函 数 功 能:读取一次ADC数据
* 传 入 参 数:无
* 函 数 返 回:无
* 作 者:LCKFB
* 备 注:LP
**********************************************************/
static uint32_t ADC_GET(void)
{
unsigned int gAdcResult = 0;
//使能ADC转换
DL_ADC12_enableConversions(ADC12_0_INST);
//软件触发ADC开始转换
DL_ADC12_startConversion(ADC12_0_INST);
//如果当前状态 不是 空闲状态
while (DL_ADC12_getStatus(ADC12_0_INST) != DL_ADC12_STATUS_CONVERSION_IDLE );
//清除触发转换状态
DL_ADC12_stopConversion(ADC12_0_INST);
//失能ADC转换
DL_ADC12_disableConversions(ADC12_0_INST);
//获取数据
gAdcResult = DL_ADC12_getMemResult(ADC12_0_INST, ADC12_0_ADCMEM_CH0);
return gAdcResult;
}
/******************************************************************
* 函 数 名 称:Get_US016_Value
* 函 数 说 明:对ADC值进行平均值计算后输出
* 函 数 形 参:无
* 函 数 返 回:对应扫描的ADC值
* 作 者:LCKFB
* 备 注:无
******************************************************************/
unsigned int Get_US016_Value(void)
{
uint32_t Data = 0;
for(int i = 0; i < SAMPLES; i++)
{
Data += ADC_GET();
//lc_printf("Data = %d\r\n", Data);
delay_ms(5);
}
Data = Data / SAMPLES;
//lc_printf("return Data = %d\r\n", Data);
return Data;
}
/******************************************************************
* 函 数 名 称:Get_US016_Distance
* 函 数 说 明:读取测距距离
* 函 数 形 参:无
* 函 数 返 回:浮点型的测距的距离
* 作 者:LCKFB
* 备 注:
量程为3米时距离公式为:L = (A*3072/4096)*(Vref/Vcc)
量程为1米时距离公式为:L = (A*1024/4096)*(Vref/Vcc)
Vref 为 ADC 的参考电压,Vcc 为 US-016 的电源电压
******************************************************************/
float Get_US016_Distance(void)
{
float distance = 0;
unsigned int d = Get_US016_Value();
#if !RANGE
distance = d * 0.75;
#else
distance = d * 0.25;
#endif
//lc_printf("return distance = %f\r\n", distance);
return distance;
}在文件bsp_us016.h中,编写如下代码。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#ifndef _BSP_US016_H_
#define _BSP_US016_H_
#include "board.h"
/* 采集次数 */
#define SAMPLES 10
float Get_US016_Distance(void);
#endif四、移植验证
在empty.c中输入代码如下:
#include "ti_msp_dl_config.h"
#include "board.h"
#include "bsp_us016.h"
int main(void)
{
SYSCFG_DL_init();
lc_printf("US-016 Demo Start.....\r\n");
while (1)
{
lc_printf("\nUS-016 Distance = %dcm\r\n",(int)(Get_US016_Distance()/10.0));
delay_ms(500);
}
}距离障碍物20CM进行测量
【代码下载】
- 跳转到
下载中心去下载CCS模块移植代码:【点击跳转🚀】