一、模块来源
采购链接:
HC-SR04 超声波测距模块 宽电压3-5.5V 工业级 传感器
资料下载链接:
https://pan.baidu.com/s/1sSah9PvLBrmbA7So-6YcSw
资料提取码:qq35
二、规格参数
工作电压:3-5.5V
工作电流:5.3MA
感应角度:小于15度
探测距离:2CM-600CM
探测精度:0.1CM+1%
输出方式: GPIO
管脚数量:4 Pin
以上信息见厂家资料文件
三、移植过程
我们的目标是将例程移植至MSPM0G3507开发板上【能够判断前方障碍物距离的功能】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
1、查看资料
只需要在 Trig 管脚(触发信号)输入一个 10US 以上的高电平,系统便可发出 8 个 40KHZ 的超声波脉冲,然后检测回波信号。当检测到回波信号后,通过 Echo 管脚输出。根据 Echo 管脚输出高电平的持续时间可以计算距离值。即距离值为:(高电平时间*340m/s)/2。
当测量距离超过 HC-SR04 的测量范围时,仍会通过 Echo管脚输出高电平的信号,高电平的宽度约为 66ms。如图所示:
测量周期:当接收到 HC-SR04 通过 Echo 管脚输出的高电平脉冲后,便可进行下一次测量,所以测量周期取决于测量距离,当距离被测物体很近时,Echo 返回的脉冲宽度较窄,测量周期 就很短;当距离被测物体比较远时,Echo 返回的脉冲宽度较宽,测量周期也就相应的变长。最坏情况下,被测物体超出超声波模块的测量范围,此时 返回的脉冲宽度最长,约为 66ms,所以最坏情况下的测量周期稍大于 66ms 即可(取 70ms 足够)。
2、引脚选择
| VCC | 3V3 |
| Trig | PA9 |
| Echo | PA8 |
| GND | GND |
接下来我们配置 SYSCONFIG
- 双击 empty.syscfg 文件,打开它。
- 点击 ADD 添加GPIO配置
- 添加配置引脚
- 配置GPIO
- 添加TIMER
- 配置TIMER
Ctrl + S保存配置文件然后点击编译(可能会报错,我们不用管!)
- 然后我们所有设定的引脚和功能就会在 ti_msp_dl_config.h 中定义。因为这个文件我们包含进了 board.h 所以我们只需要引用 board.h 即可。【这里的 board.h 就充当了芯片头文件的作用】
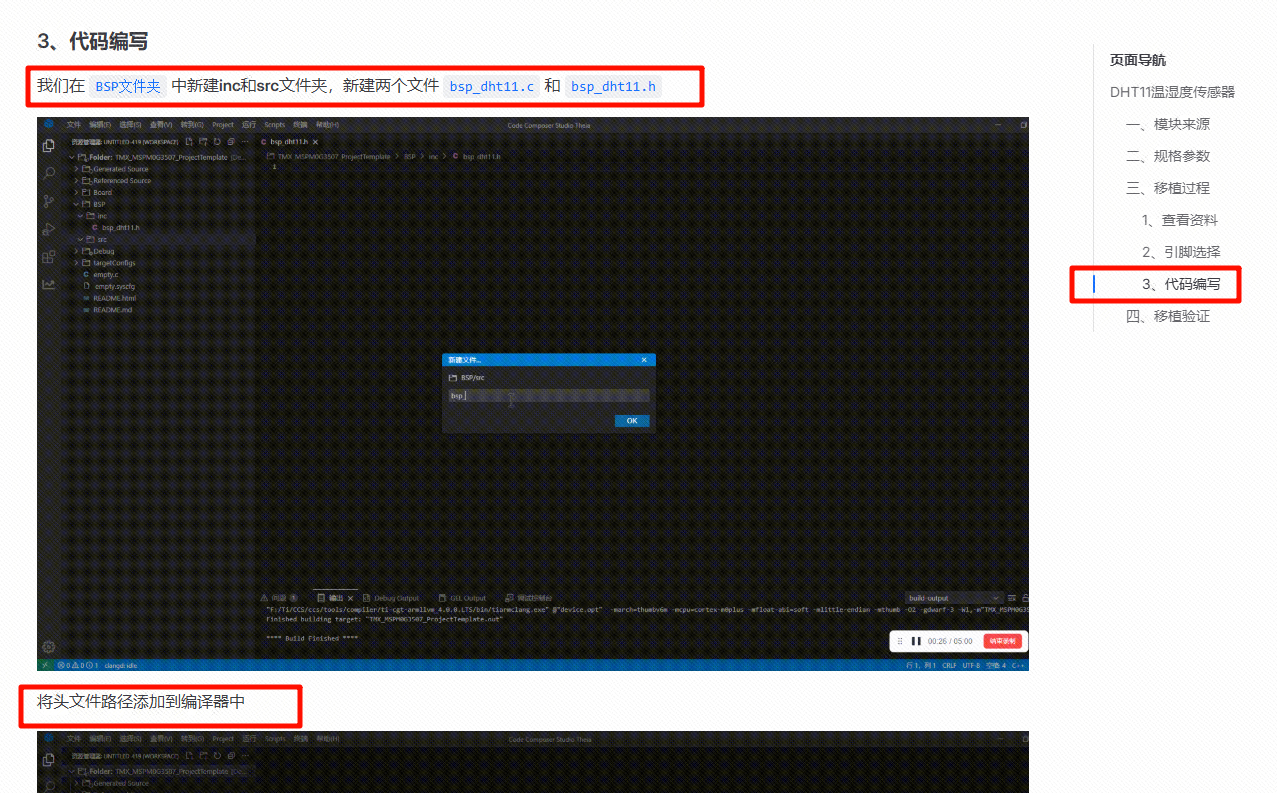
3、代码编写
我们在 BSP文件夹 中新建inc和src文件夹,新建两个文件 bsp_sr04.c 和 bsp_sr04.h,并且将头文件路径添加到编译器中。
在文件bsp_sr04.c中,编写如下代码。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#include "bsp_sr04.h"
#include "board.h"
volatile uint32_t msHcCount = 0; // ms计数
float distance = 0;
uint8_t SR04_Flag = 0; // 完成测量标志
/******************************************************************
* 函 数 名 称:SR04_Init
* 函 数 说 明:超声波初始化
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LCKFB
* 备 注:TRIG引脚负责发送超声波脉冲串
******************************************************************/
void SR04_Init(void)
{
// 清除定时器中断标志
NVIC_ClearPendingIRQ(TIMER_0_INST_INT_IRQN);
// 使能定时器中断
NVIC_EnableIRQ(TIMER_0_INST_INT_IRQN);
}
/******************************************************************
* 函 数 名 称:Open_Timer
* 函 数 说 明:打开定时器
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LCKFB
* 备 注:
******************************************************************/
void Open_Timer(void)
{
DL_TimerG_setTimerCount(TIMER_0_INST, 0); // 清除定时器计数
msHcCount = 0;
DL_TimerG_startCounter(TIMER_0_INST); // 使能定时器
}
/******************************************************************
* 函 数 名 称:Get_TIMER_Count
* 函 数 说 明:获取定时器定时时间
* 函 数 形 参:无
* 函 数 返 回:数据
* 作 者:LCKFB
* 备 注:
******************************************************************/
uint32_t Get_TIMER_Count(void)
{
uint32_t time = 0;
time = msHcCount * 1000; // 得到us
time += DL_TimerG_getTimerCount(TIMER_0_INST); // 得到ms
DL_TimerG_setTimerCount(TIMER_0_INST, 0); // 清除定时器计数
delay_ms(1);
return time ;
}
/******************************************************************
* 函 数 名 称:Close_Timer
* 函 数 说 明:关闭定时器
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LCKFB
* 备 注:
******************************************************************/
void Close_Timer(void)
{
DL_TimerG_stopCounter(TIMER_0_INST); // 关闭定时器
}
/******************************************************************
* 函 数 名 称:TIMER_0_INST_IRQHandler
* 函 数 说 明:定时器中断服务函数
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LCKFB
* 备 注:1ms进入一次
******************************************************************/
void TIMER_0_INST_IRQHandler(void)
{
//如果产生了定时器中断
switch( DL_TimerG_getPendingInterrupt(TIMER_0_INST) )
{
case DL_TIMERA_IIDX_LOAD:
msHcCount++;
break;
default://其他的定时器中断
break;
}
}
void GROUP1_IRQHandler(void)//Group1的中断服务函数
{
//读取Group1的中断寄存器并清除中断标志位
switch( DL_Interrupt_getPendingGroup(DL_INTERRUPT_GROUP_1) )
{
//检查GPIO端口中断,注意是INT_IIDX
case SR04_INT_IIDX:
if( SR04_ECHO() ) // 上升沿
{
SR04_Flag = 0;
distance = 0.0;
Open_Timer(); //打开定时器
}
else // 下降沿
{
NVIC_DisableIRQ(SR04_INT_IRQN); // 关闭按键引脚的GPIO端口中断
Close_Timer(); // 关闭定时器
SR04_Flag = 1;
distance = (float)Get_TIMER_Count() / 58.0f; // 获取时间,分辨率为1us
}
break;
}
}
/******************************************************************
* 函 数 名 称:SR04_GetLength
* 函 数 说 明:获取测量距离
* 函 数 形 参:无
* 函 数 返 回:测量距离
* 作 者:LCKFB
* 备 注:无
******************************************************************/
float SR04_GetLength(void)
{
/* 测5次数据,去掉最高值和最低值后计算平均值 */
float distances[5] = {0}; // 用于存储测量结果
uint32_t TimeOut = 1000;
uint8_t valid_count = 0;
for (uint8_t i = 0; i < 5; i++)
{
msHcCount = 0; // ms计数清零
SR04_Flag = 0; // 完成测量标志清零
TimeOut = 1000; // 超时时间
// 开启按键引脚的GPIO端口中断
NVIC_EnableIRQ(SR04_INT_IRQN);
delay_ms(10);
// 触发测量
SR04_TRIG(0); // trig拉低信号
delay_1us(10); // 持续时间超过5us
SR04_TRIG(1); // trig拉高信号
delay_1us(15); // 持续时间超过10us
SR04_TRIG(0); // trig拉低信号
// 等待测量完成或超时
while (SR04_Flag == 0 && TimeOut)
{
TimeOut--;
}
if (TimeOut == 0) // 超时处理
{
LOG_D("SR04 Time Out!");
continue; // 跳过本次测量
}
distances[valid_count++] = distance; // 保存有效测量结果
}
NVIC_DisableIRQ(SR04_INT_IRQN); // 关闭按键引脚的GPIO端口中断
// 检查有效测量次数
if (valid_count < 3) // 少于3次有效数据,无法计算去掉最高最低值的平均值
{
LOG_D("Not enough valid measurements!");
return 0;
}
// 排序以便去除最高值和最低值
for (uint8_t i = 0; i < valid_count - 1; i++)
{
for (uint8_t j = i + 1; j < valid_count; j++)
{
if (distances[i] > distances[j])
{
float temp = distances[i];
distances[i] = distances[j];
distances[j] = temp;
}
}
}
// 计算去掉最高值和最低值后的平均值
float sum = 0;
for (uint8_t i = 1; i < valid_count - 1; i++)
{
sum += distances[i];
}
return sum / (valid_count - 2); // 返回中间值的平均值
}在文件bsp_sr04.h中,编写如下代码。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#ifndef __BSP_SR04_H__
#define __BSP_SR04_H__
#include "board.h"
#define SR04_TRIG(x) ( x ? DL_GPIO_setPins(SR04_PORT,SR04_Trig_PIN) : DL_GPIO_clearPins(SR04_PORT,SR04_Trig_PIN) )
#define SR04_ECHO() ( ( ( DL_GPIO_readPins(SR04_PORT,SR04_Echo_PIN) & SR04_Echo_PIN ) > 0 ) ? 1 : 0 )
void SR04_Init(void);//超声波初始化
float SR04_GetLength(void );//获取超声波测距的距离
#endif四、移植验证
在empty.c中输入代码如下:
#include "ti_msp_dl_config.h"
#include "board.h"
#include "bsp_sr04.h"
int main(void)
{
SYSCFG_DL_init();
SR04_Init();
lc_printf("SR04 Start.......\r\n");
while(1)
{
uint32_t Value = (int)SR04_GetLength();
lc_printf("Distance = %dCM\r\n", Value);
delay_ms(500);
}
}上电效果:距离障碍物20CM
【代码下载】
- 跳转到
下载中心去下载CCS模块移植代码:【点击跳转🚀】