微波运动传感器是利用多普勒雷达原理设计的微波移动物体探测器。不同于一般的红外探测器,微波传感器通过通过检测物体反射的微波来探测物体的运动状况,检测对象将并不会局限于人体,还有很多其他的事物。微波传感器不受环境温度的影响,探测距离远,灵敏度高,被广泛应用于工业、交通及民用装置中,如车辆测速、自动门、感应灯、倒车雷达等。
由于微波传感器检测对象存在普遍性,在实际的生活应用中,会搭配另一个传感器来做针对性的检测。如微波传感器+红外热释电传感器,能够有效的判断是否有人经过,不会被阳光,被衣物颜色所干扰,也不会对其他物体产生反应。
一、模块来源
二、规格参数
工作电压:5V±0.25V
工作电流:30~50mA
探测距离:2-16m 连续可调
尺寸: R=30.6mm
输出方式: GPIO
管脚数量:3 Pin
以上信息见厂家资料文件
三、移植过程
我们的目标是将例程移植至MSPM0G3507开发板上【能够判断测量一定距离内是否物体运动】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
1、查看资料
由于微波传感器检测对象存在普遍性,即只要有物体动作,都能够检测到,因此只需要检测OUT引脚的高低电平变化即可。
2、引脚选择
| VCC | 5V0 |
| GND | GND |
| OUT | PA7 |
接下来我们配置 SYSCONFIG
- 双击 empty.syscfg 文件,打开它。
- 添加GPIO
- 配置GPIO
剩余的引脚也是一样的配置
Ctrl + S保存配置文件然后点击编译(可能会报错,我们不用管!)
- 然后我们所有设定的引脚和功能就会在 ti_msp_dl_config.h 中定义。因为这个文件我们包含进了 board.h 所以我们只需要引用 board.h 即可。【这里的 board.h 就充当了芯片头文件的作用】
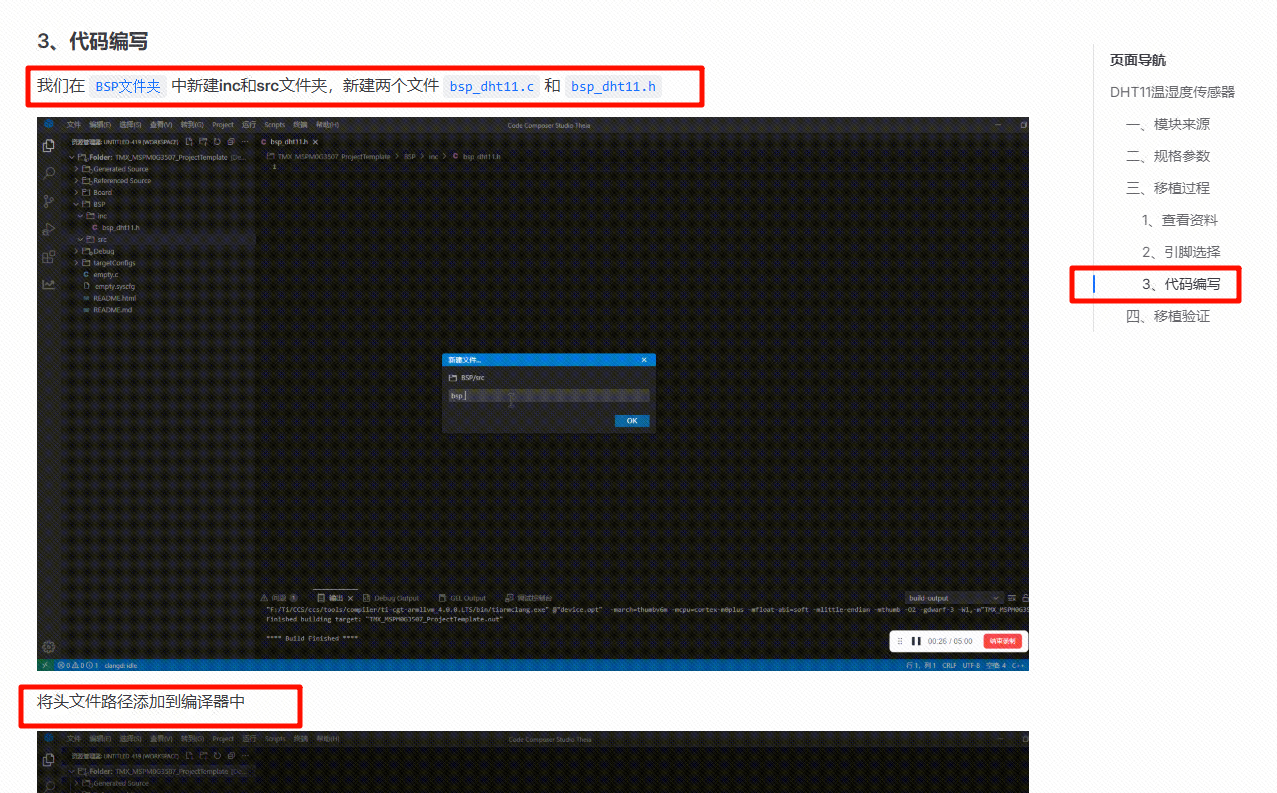
3、代码编写
我们在 BSP文件夹 中新建inc和src文件夹,新建两个文件 bsp_mh100x.c 和 bsp_mh100x.h,并且将头文件路径添加到编译器中。
在文件 bsp_mh100x.c 中,编写如下代码。
c
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#include "bsp_mh100x.h"
/******************************************************************
* 函 数 名 称:OUTPIN_Scanf
* 函 数 说 明:返回OUT引脚电平状态
* 函 数 形 参:无
* 函 数 返 回:1=未检测到物体移动 0=检测到物体移动
* 作 者:LCKFB
* 备 注:无
******************************************************************/
char OUTPIN_Scanf(void)
{
return OUT_IN;
}在文件 bsp_mh100x.h 中,编写如下代码。
c
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#ifndef _BSP_MH100X_H_
#define _BSP_MH100X_H_
#include "board.h"
#define OUT_IN ( ( DL_GPIO_readPins( GPIO_PORT, GPIO_OUT_PIN ) & GPIO_OUT_PIN ) ? 1 : 0 )
char OUTPIN_Scanf(void);//微波雷达的输入状态
#endif四、移植验证
在empty.c中输入代码如下:
c
#include "ti_msp_dl_config.h"
#include "board.h"
#include "bsp_mh100x.h"
int main(void)
{
uint8_t flag = 0;
uint16_t time = 0;
SYSCFG_DL_init();
lc_printf("\nDemo Start\r\n");
while(1)
{
//检测到有物体移动
if( OUTPIN_Scanf() == 0 )
{
flag = 1;
}
if( flag == 1 )
{
if( time == 0 ) //打开门
{
lc_printf("open\r\n");
}
time++;
if( time >= 2000 )//超过两秒则关门
{
time = 0;
flag = 0;
lc_printf("close\r\n");
}
delay_ms(1);//时间基准
}
}
}【代码下载】
- 跳转到
下载中心去下载CCS模块移植代码:【点击跳转🚀】