10、PHY状态机
一、PHY状态机定义
phy状态机:·
目录:include/linux/phy.h
C
enum phy_state {
PHY_DOWN = 0, //0 down 如关闭网卡,ifconfig eth0 down
PHY_STARTING, //1 PHY芯片OK了,但驱动还没有准备好
PHY_READY, //2 phy设备注册成功
PHY_PENDING, //3 phy芯片挂起
PHY_UP, //4 开启网卡,ifconfig eth0 up
PHY_AN, //5 网卡自动协商
PHY_RUNNING, //6 网卡上已插入网线、并建立物理连接
PHY_NOLINK, //7 断网,如拔掉网线
PHY_FORCING, //8 自动协商标识未被使能,就强制执行自动协商(读取phy寄存器、并设置通讯速率、半双工或全双工模式、等)
PHY_CHANGELINK, //9 当连接时,会换到PHY_RUNNING,当断网时,会切到PHY_NOLINK
PHY_HALTED, //10 即phy挂起
PHY_RESUMING //11 即phy恢复
};phy的状态变化主要在phy_state_machine中:
目录:drivers/net/phy/phy_device.c
C
struct phy_device *phy_device_create(struct mii_bus *bus, int addr, int phy_id,
bool is_c45,
struct phy_c45_device_ids *c45_ids)
{
INIT_DELAYED_WORK(&dev->state_queue, phy_state_machine);
}目录:drivers/net/phy/phy.c
C
/**
* phy_state_machine - Handle the state machine
* @work: work_struct that describes the work to be done
*/
void phy_state_machine(struct work_struct *work)
{
struct delayed_work *dwork = to_delayed_work(work);
struct phy_device *phydev =
container_of(dwork, struct phy_device, state_queue);
bool needs_aneg = false, do_suspend = false;
enum phy_state old_state;
int err = 0;
int old_link;
mutex_lock(&phydev->lock);
old_state = phydev->state;
if (phydev->drv && phydev->drv->link_change_notify)
phydev->drv->link_change_notify(phydev);
switch (phydev->state) {
case PHY_DOWN:
case PHY_STARTING:
case PHY_READY:
case PHY_PENDING:
break;
case PHY_UP:
needs_aneg = true; //phy_start_aneg-> phydev->state = PHY_AN 网卡协商
phydev->link_timeout = PHY_AN_TIMEOUT;
break;
case PHY_AN:
err = phy_read_status(phydev);
if (err < 0)
break;
/* If the link is down, give up on negotiation for now */
if (!phydev->link) {
phydev->state = PHY_NOLINK;
phy_link_down(phydev, true);
break;
}
/* Check if negotiation is done. Break if there's an error */
err = phy_aneg_done(phydev);
if (err < 0)
break;
/* If AN is done, we're running */
if (err > 0) {
phydev->state = PHY_RUNNING;
phy_link_up(phydev);
} else if (0 == phydev->link_timeout--)
needs_aneg = true;
break;
case PHY_NOLINK:
if (!phy_polling_mode(phydev))
break;
err = phy_read_status(phydev);
if (err)
break;
if (phydev->link) {
if (AUTONEG_ENABLE == phydev->autoneg) {
err = phy_aneg_done(phydev);
if (err < 0)
break;
if (!err) {
phydev->state = PHY_AN;
phydev->link_timeout = PHY_AN_TIMEOUT;
break;
}
}
phydev->state = PHY_RUNNING;
phy_link_up(phydev);
}
break;
case PHY_FORCING:
err = genphy_update_link(phydev);
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING;
phy_link_up(phydev);
} else {
if (0 == phydev->link_timeout--)
needs_aneg = true;
phy_link_down(phydev, false);
}
break;
case PHY_RUNNING:
/* Only register a CHANGE if we are polling and link changed
* since latest checking.
*/
if (phy_polling_mode(phydev)) {
old_link = phydev->link;
err = phy_read_status(phydev);
if (err)
break;
if (old_link != phydev->link)
phydev->state = PHY_CHANGELINK;
}
/*
* Failsafe: check that nobody set phydev->link=0 between two
* poll cycles, otherwise we won't leave RUNNING state as long
* as link remains down.
*/
if (!phydev->link && phydev->state == PHY_RUNNING) {
phydev->state = PHY_CHANGELINK;
phydev_err(phydev, "no link in PHY_RUNNING\n");
}
break;
case PHY_CHANGELINK:
err = phy_read_status(phydev);
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING;
phy_link_up(phydev);
} else {
phydev->state = PHY_NOLINK;
phy_link_down(phydev, true);
}
break;
case PHY_HALTED:
if (phydev->link) {
phydev->link = 0;
phy_link_down(phydev, true);
do_suspend = true;
}
break;
case PHY_RESUMING:
if (AUTONEG_ENABLE == phydev->autoneg) {
err = phy_aneg_done(phydev);
if (err < 0)
break;
/* err > 0 if AN is done.
* Otherwise, it's 0, and we're still waiting for AN
*/
if (err > 0) {
err = phy_read_status(phydev);
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING;
phy_link_up(phydev);
} else {
phydev->state = PHY_NOLINK;
phy_link_down(phydev, false);
}
} else {
phydev->state = PHY_AN;
phydev->link_timeout = PHY_AN_TIMEOUT;
}
} else {
err = phy_read_status(phydev);
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING;
phy_link_up(phydev);
} else {
phydev->state = PHY_NOLINK;
phy_link_down(phydev, false);
}
}
break;
}
mutex_unlock(&phydev->lock);
if (needs_aneg)
err = phy_start_aneg_priv(phydev, false);
else if (do_suspend)
phy_suspend(phydev);
if (err < 0)
phy_error(phydev);
if (old_state != phydev->state)
phydev_dbg(phydev, "PHY state change %s -> %s\n",
phy_state_to_str(old_state),
phy_state_to_str(phydev->state));
/* Only re-schedule a PHY state machine change if we are polling the
* PHY, if PHY_IGNORE_INTERRUPT is set, then we will be moving
* between states from phy_mac_interrupt()
*/
if (phy_polling_mode(phydev))
queue_delayed_work(system_power_efficient_wq, &phydev->state_queue,
PHY_STATE_TIME * HZ);
}其中CHANGELINK是会根据网络连、断来判断是RUNNING还是NOLINK。这样,就知道网络是连接上还是断开。当连接上网络后(注:不断开情况),状态为RUNNING时,之后重新赋值CHANGELINK,到了CHANGELINK又赋值RUNNING,这两种状态之间不断切换。
目录:include/linux/phy.h
C
/**
* phy_polling_mode - Convenience function for testing whether polling is
* used to detect PHY status changes
* @phydev: the phy_device struct
*/
static inline bool phy_polling_mode(struct phy_device *phydev)
{
return phydev->irq == PHY_POLL;
}phydev->irq赋值位置位于phy中断申请时刻:
目录:drivers/net/phy/phy.c
C
/**
* phy_start_interrupts - request and enable interrupts for a PHY device
* @phydev: target phy_device struct
*
* Description: Request the interrupt for the given PHY.
* If this fails, then we set irq to PHY_POLL.
* Otherwise, we enable the interrupts in the PHY.
* This should only be called with a valid IRQ number.
* Returns 0 on success or < 0 on error.
*/
int phy_start_interrupts(struct phy_device *phydev)
{
if (request_threaded_irq(phydev->irq, NULL, phy_interrupt,
IRQF_ONESHOT | IRQF_SHARED,
phydev_name(phydev), phydev) < 0) {
pr_warn("%s: Can't get IRQ %d (PHY)\n",
phydev->mdio.bus->name, phydev->irq);
phydev->irq = PHY_POLL;
return 0;
}
return phy_enable_interrupts(phydev);
}
EXPORT_SYMBOL(phy_start_interrupts);若申请中断成功,则中断服务程序如下:
C
/**
* phy_interrupt - PHY interrupt handler
* @irq: interrupt line
* @phy_dat: phy_device pointer
*
* Description: When a PHY interrupt occurs, the handler disables
* interrupts, and uses phy_change to handle the interrupt.
*/
static irqreturn_t phy_interrupt(int irq, void *phy_dat)
{
struct phy_device *phydev = phy_dat;
if (PHY_HALTED == phydev->state)
return IRQ_NONE; /* It can't be ours. */
return phy_change(phydev);
}C
/**
* phy_change - Called by the phy_interrupt to handle PHY changes
* @phydev: phy_device struct that interrupted
*/
static irqreturn_t phy_change(struct phy_device *phydev)
{
if (phy_interrupt_is_valid(phydev)) {
if (phydev->drv->did_interrupt &&
!phydev->drv->did_interrupt(phydev))
return IRQ_NONE;
if (phydev->state == PHY_HALTED)
if (phy_disable_interrupts(phydev))
goto phy_err;
}
mutex_lock(&phydev->lock);
if ((PHY_RUNNING == phydev->state) || (PHY_NOLINK == phydev->state))
phydev->state = PHY_CHANGELINK;
mutex_unlock(&phydev->lock);
/* reschedule state queue work to run as soon as possible */
phy_trigger_machine(phydev, true); //重点
if (phy_interrupt_is_valid(phydev) && phy_clear_interrupt(phydev))
goto phy_err;
return IRQ_HANDLED;
phy_err:
phy_error(phydev);
return IRQ_NONE;
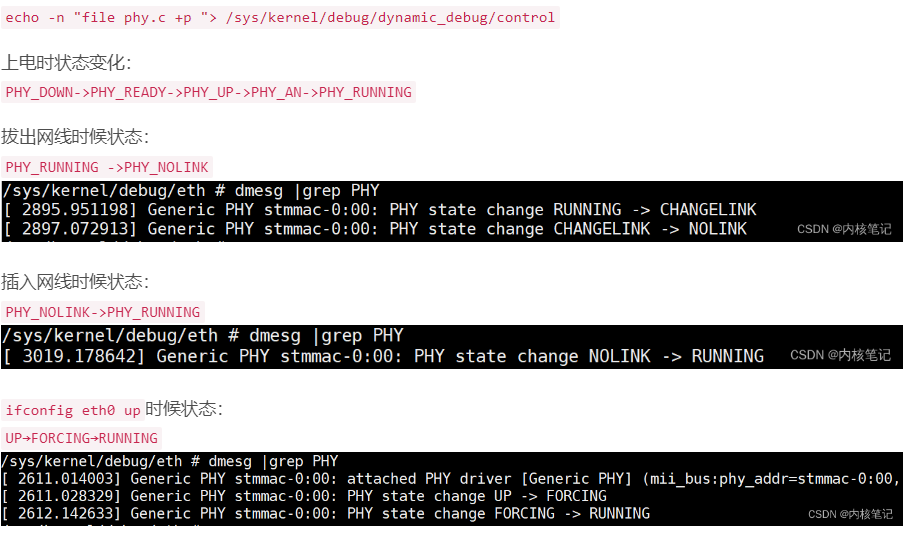
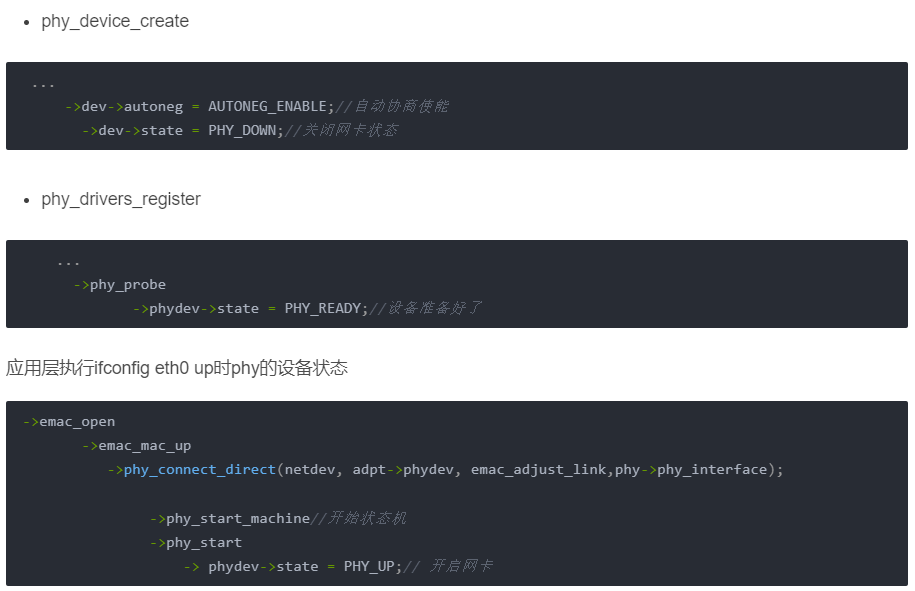
}二、PHY的状态变化
三、PHY的状态变化打印