是的,I2C在Linux中确实遵循总线设备模型,但它的设备和驱动有自己独特的命名方式。具体来说:
总线结构的区别 I2C直接使用真实的物理总线,不像平台总线需要虚拟一条软件总线。平台总线是为没有物理总线的设备设计的,而I2C本身就是硬件存在的通信总线,所以它有自己的总线驱动和框架。
为什么叫client不叫device? 在I2C体系中:
总线控制器称为
adapter(适配器)连接在总线上的设备称为
client(客户端) 这就像总线是"主服务器",设备是"客户端"的关系,所以不沿用通用的device名称。
- 实现方式演变
- 传统方式(无设备树): 需要手动编写代码注册client:
static struct i2c_device_id my_id[ ] = {
{"my_client", 0},
{}
};
static struct i2c_board_info __initmy_board_info(void) {
return {
I2C_BOARD_INFO("my_client", 0x48), // 设备地址
};
}
static int __init my_init(void) {
i2c_register_board_info(0, my_board_info, 1);
return 0;
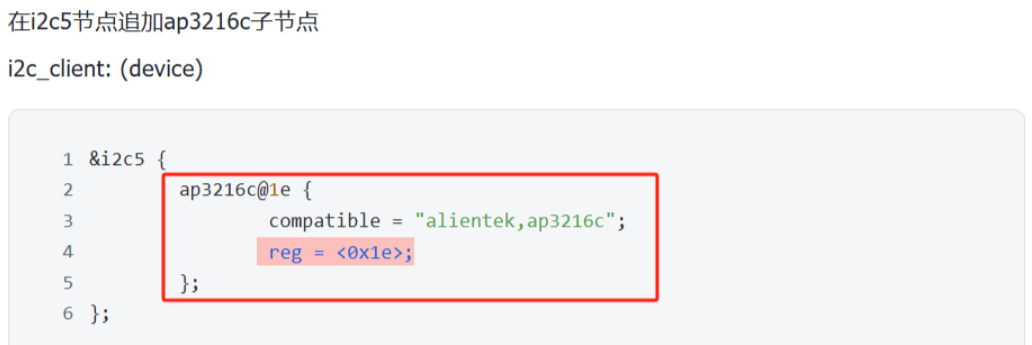
}- 设备树方式: 在设备树里直接写:
i2c@addr {
compatible = "my_client";
reg = <0x48>; // 设备地址
};驱动自动匹配,无需手动注册。
::: 总结来说:I2C设备叫client是因为总线架构特性,实现方式从早期的手动注册发展到现在的设备树自动配置,但核心都是总线模型下的设备-驱动匹配机制。 :::
一、非设备树实现 i2c client
在没有使用设备树之前,我们使用的是 i2c_board_info 这个结构体来描述一个 I2C 设备的,i2c_board_info 这个结构体如下:
struct i2c_board_info
{
char type[I2C_NAME_SIZE]; /* I2C 设备名字 */
unsigned short flags; /* 标志 */
unsigned short addr; /* I2C 器件地址 */
void *platform_data;
struct dev_archdata *archdata;
struct device_node *of_node;
struct fwnode_handle *fwnode;
int irq;在这个结构体里面,type 和 addr 这两个成员变量是必须要设置的,一个是 I2C 设备的名字,这个名字就是用来进行匹配用的,一个是 I2C 设备的器件地址,也可以使用宏:
#define I2C_BOARD_INFO(dev_type, dev_addr) \
.type = dev_type, .addr = (dev_addr)I2C_BOARD_INFO宏的作用是设置i2c_board_info结构体的设备类型(type)和地址(addr)这两个关键参数。I2C设备与驱动的匹配过程由I2C核心模块负责处理,该核心模块位于Linux内核的drivers/i2c/i2c-core.c文件中,并提供了与硬件无关的通用API函数。
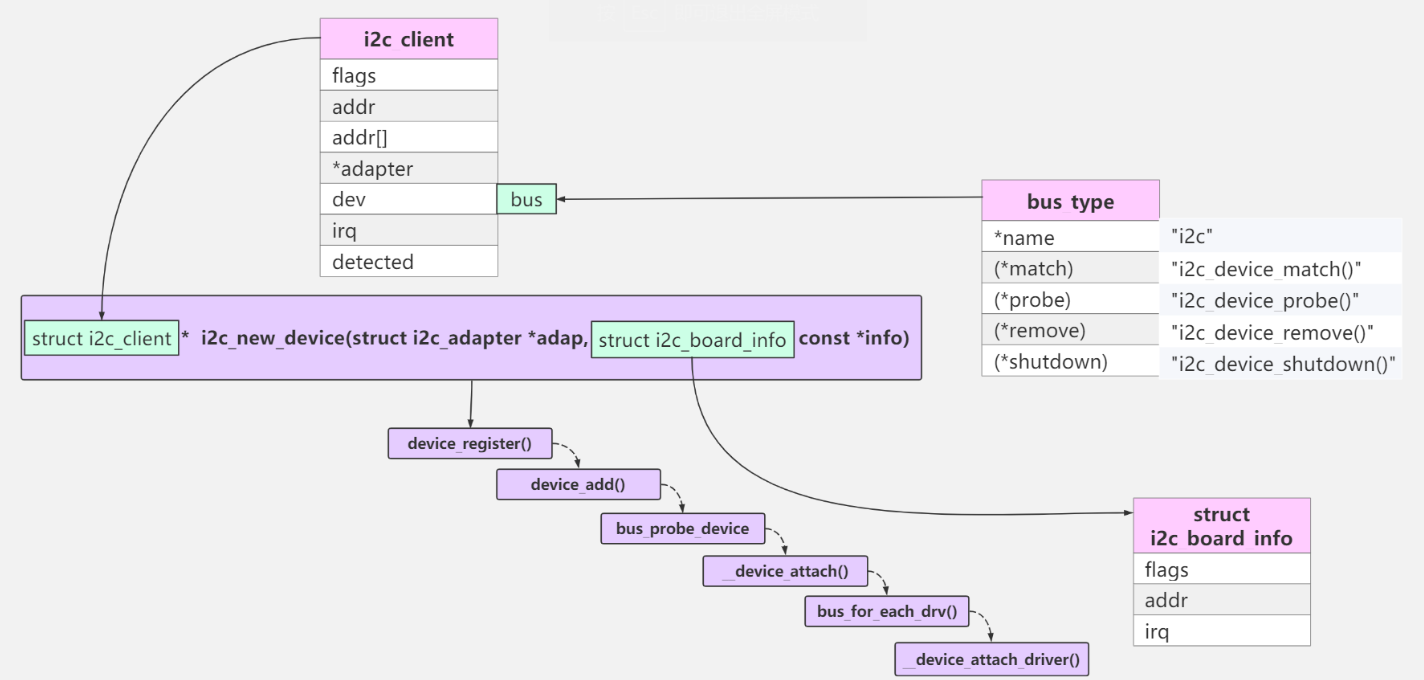
1.1、i2c_new_device
使用接收到的适配器和i2c板信息作为参数来创建i2c设备并进行注册。如果有匹配的驱动程序,它将调用该驱动程序的探针挂钩。
struct i2c_client *
i2c_new_device(struct i2c_adapter *adap, struct i2c_board_info const *info)
{
struct i2c_client *client;
int status;
client = kzalloc(sizeof *client, GFP_KERNEL);
if (!client)
return NULL;
client->adapter = adap;
client->dev.platform_data = info->platform_data;
client->flags = info->flags;
client->addr = info->addr;
client->init_irq = info->irq;
if (!client->init_irq)
client->init_irq = i2c_dev_irq_from_resources(info->resources,
info->num_resources);
client->irq = client->init_irq;
strlcpy(client->name, info->type, sizeof(client->name));
status = i2c_check_addr_validity(client->addr, client->flags);
if (status) {
dev_err(&adap->dev, "Invalid %d-bit I2C address 0x%02hx\n",
client->flags & I2C_CLIENT_TEN ? 10 : 7, client->addr);
goto out_err_silent;
}
/* Check for address business */
status = i2c_check_addr_ex(adap, i2c_encode_flags_to_addr(client));
if (status)
dev_err(&adap->dev,
"%d i2c clients have been registered at 0x%02x",
status, client->addr);
client->dev.parent = &client->adapter->dev;
client->dev.bus = &i2c_bus_type;
client->dev.type = &i2c_client_type;
client->dev.of_node = of_node_get(info->of_node);
client->dev.fwnode = info->fwnode;
i2c_dev_set_name(adap, client, info, status);
if (info->properties) {
status = device_add_properties(&client->dev, info->properties);
if (status) {
dev_err(&adap->dev,
"Failed to add properties to client %s: %d\n",
client->name, status);
goto out_err_put_of_node;
}
}
status = device_register(&client->dev);
if (status)
goto out_free_props;
dev_dbg(&adap->dev, "client [%s] registered with bus id %s\n",
client->name, dev_name(&client->dev));
return client;
out_free_props:
if (info->properties)
device_remove_properties(&client->dev);
out_err_put_of_node:
of_node_put(info->of_node);
out_err_silent:
kfree(client);
return NULL;
}
EXPORT_SYMBOL_GPL(i2c_new_device);i2c_new_device 实现内容:
用kzalloc函数在内存中申请一块空间来存放i2c_client结构体,并自动将这块空间清零。
把传入的i2c适配器信息保存到新结构体的适配器对应位置。
将预设的设备信息(包括设备地址、标志位、中断号等)从i2c_board_info结构体复制到新创建的i2c_client结构体中。
检查设备地址是否合法:先验证地址格式是否正确,再确认该地址没有被其他设备占用。
给新设备设置名称、设备树节点、属性等额外信息。
最后调用设备注册函数,把这个新创建的i2c设备正式添加到系统设备列表里。
整个过程就是先分配内存空间存放设备信息,填入设备参数,检查参数有效性,最后将设备注册到系统中。
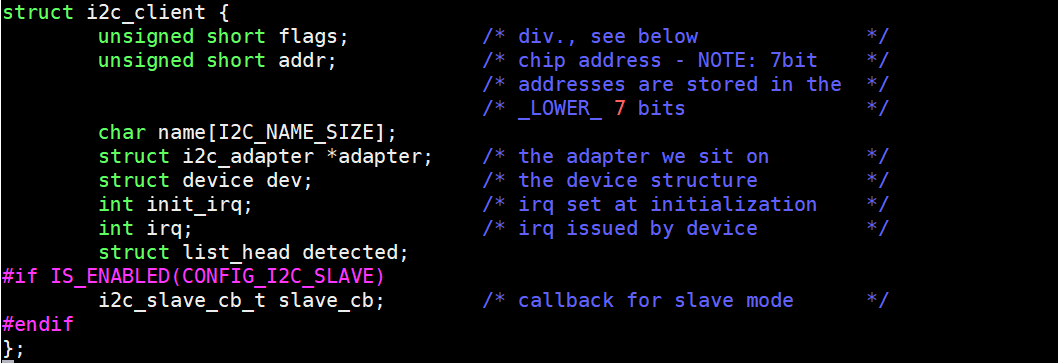
1.2、i2c_client
i2c_client 结构体中还包括中断号、 I2C 控制器等信息, 该结构体定义在“include/linux/i2c.h” 文件中, 具体内容如下所示:
二、设备树实现 i2c
在使用了设备树以后,就不用这么复杂了,使用设备树的时候只要在对应的 I2C 节点下创建相应设备的节点即可,比如我想添加一个触摸芯片 FT5X06 的设备,我就可以在对应的 I2C 的节点下这样写,如下所示:
&i2c1 {
status = "okay"
ft5x06:ft5x06@38 {
status = "disabled";
compatible = "edt,edt-ft5306";
reg = <0x38>;
touch-gpio = <&gpio0 RK_PB5 IRQ_TYPE_EDGE_RISING>;
interrupt-parent = <&gpio0>;
interrupts = <RK_PB5 IRQ_TYPE_LEVEL_LOW>;
reset-gpios = <&gpio0 RK_PB6 GPIO_ACTIVE_LOW>;
touchscreen-size-x = <800>;
touchscreen-size-y = <1280>;
touch_type = <1>;
};
gt9xx:gt9xx_ts@14 {
compatible = "goodix,gt9xx";
reg = <0x14>;
interrupt-parent = <&gpio0>;
interrupts = <RK_PB5 IRQ_TYPE_LEVEL_LOW>;
reset-gpios = <&gpio0 RK_PB6 GPIO_ACTIVE_LOW>;
touch-gpio = <&gpio0 RK_PB5 IRQ_TYPE_EDGE_RISING>;
status = "disabled";
tp-size = <911>;
max-x = <1024>;
max-y = <600>;
};
};第
3行触摸屏所使用的FT5x06芯片节点,挂载I2C-2节点下;“@”后面的“38”就是ft5x06的I2C器件地址第
5行compatible用于和驱动程序的compatible匹配;第
6行reg属性描述ft5x的器件地址为0x38;第
8行interrupt-parent属性描述中断IO对应的GPIO组为GPIO0;第
9行interrupts属性描述中断IO对应的是GPIO0组别的B组的5号引脚;第
10行reset-gpios属性描述复位IO对应的GPIO0组别的B组的6号引脚;
因为我们的开发板默认是设备树的镜像, 我们进入到开发板的/sys/bus/i2c/devices/目录下,因为通过查找原理图发现我们屏幕使用的是i2c2,但这里我们要进入到 0-0038,查看 name 为 ft5x0x_ts
2.1、i2c_client 结构体的生成
2.2、i2c_driver 驱动
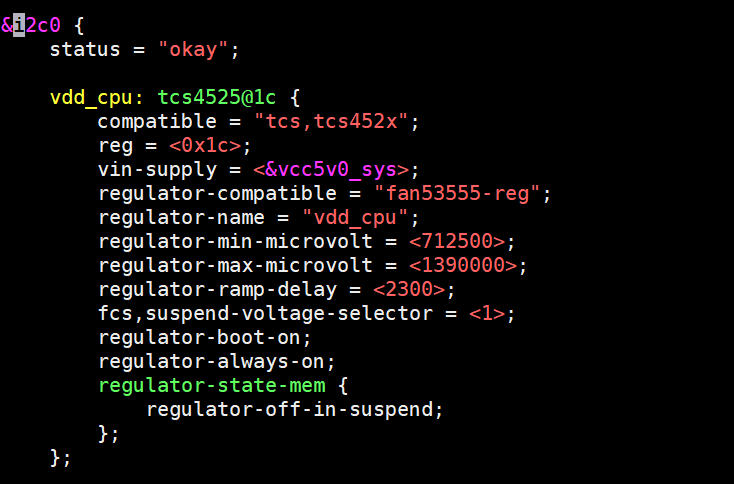
regulator/fan53555.c
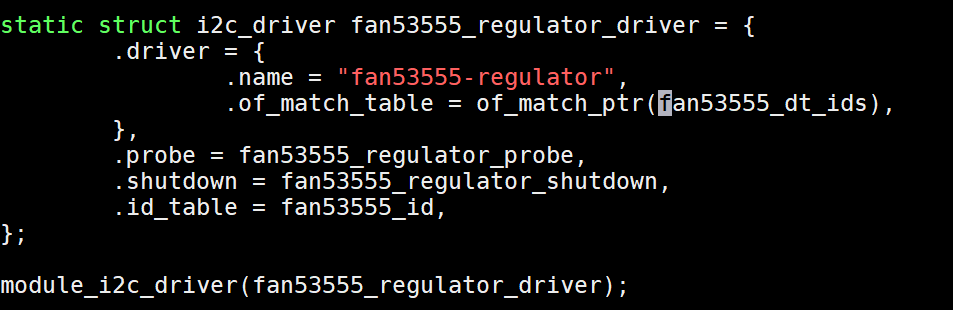
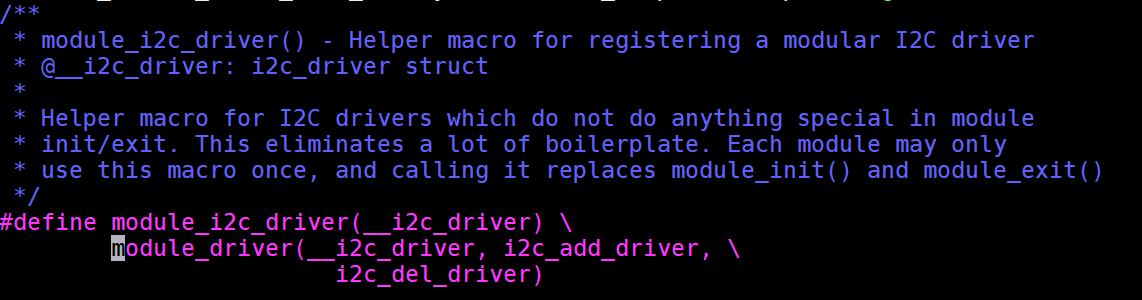
2.2.1、module_i2c_driver
linux/i2c.h
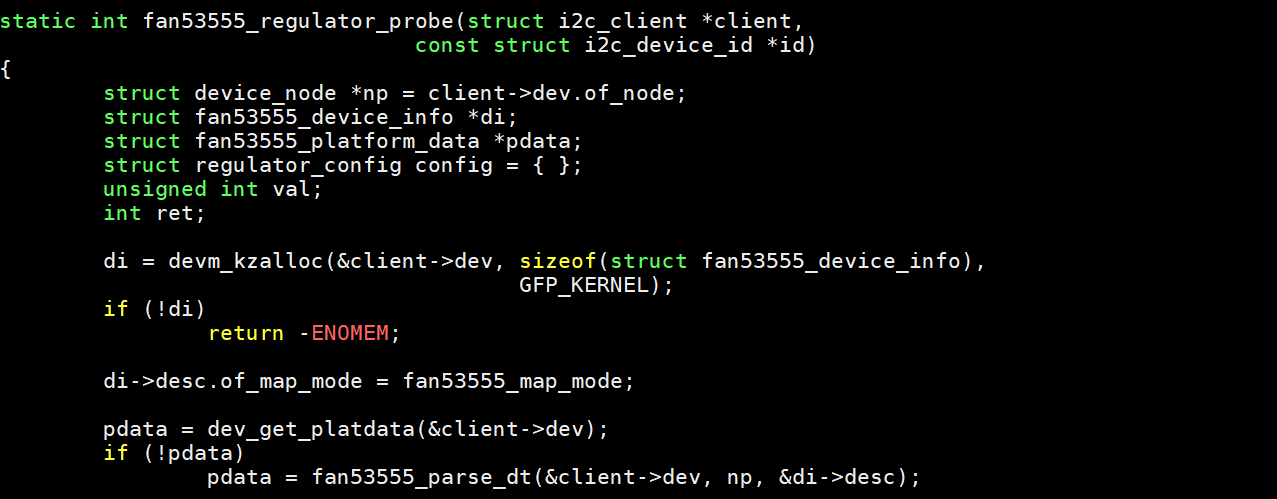
2.2.2、fan53555_regulator_probe
三、案例
3.1、非设备树方法
net/ethernet/intel/igb/igb_hwmon.c

3.2、设备树方法