L298N是ST公司生产的一种高电压、大电流电机驱动芯片。该芯片采用15脚封装。主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
一、模块来源
二、规格参数
驱动电压:5V~24V
驱动电流:2A
逻辑电压:5V
逻辑电流:36mA
控制方式:PWM
以上信息见厂家资料文件
三、移植过程
我们的目标是将例程移植至开发板上【能够控制电机旋转速度的功能】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
1、查看资料
当驱动电压为7V~12V的时候,即VCC电机驱动端子接通驱动电源时,板载的78M05供给芯片的逻辑电源,指示灯亮,可以不用再外接逻辑电源;如果使用电机驱动的板载5V供电,接口中的+5V供电端子不要输入电压,但是可以引出5V电压供外部使用(这种即为常规应用!)。
当驱动电压高于12V,小于等于24V(芯片手册中提出可以支持到35V,但是按照经验一般L298保守应用最大电压支持到24V已经很了不起!)时,比如要驱动额定电压为18V的电机。首先必须断开板载5V使能,指示灯熄灭,不使用板载的78M05供给芯片的逻辑电源,然后在5V输出端口外部接入5V电压对L298N内部逻辑电路供电。(这种是高压驱动的非常规应用!)
5V使能即一个电平为5V的控制信号,当此信号输入有效时且电机驱动模块中电源供电正常时,电机驱动模块输出电流。否则即使电源供电正常,电机上也无电流。
L298N使能端(高电平有效,常态下用跳线帽接于VCC)可通过这两个端口1实现PWM调速(使用PWM调速时取下跳线帽)ENA和ENB接EPWM信号,1N1,1N2,1N3,1N4正常接上高低电平使电机正转,反转或停转。
注意:L298N供电的5V如果是用另外电源供电的话,(即不是和单片机的电源共用),那么需要将单片机的GND和模块上的GND连接在一起,只有这样单片机上过来的逻辑信号才有个参考0点。板载5V稳压芯片的输入引脚和电机供电驱动接线端子导通的。
2、引脚选择
L298N控制电机速度的方式,是通过将IN1与IN2接入PWM,直接通过调整PWM的占空比进行速度控制。因此要求IN1/IN2/IN3/IN4都要使用PWM功能。
| GND | GND |
| +12V | 接电源(6V ~ 24V) |
| IN1 | GPIO227(EPWM2-B) |
| IN2 | GPIO230(EPWM3-B) |
| IN3 | GPIO60(EPWM12-B) |
| IN4 | GPIO63(EPWM10-B) |
| OUT1 | 电机A |
| OUT2 | 电机A |
| OUT3 | 电机B |
| OUT4 | 电机B |
接下来我们配置 SYSCONFIG
- 双击 c2000.syscfg 文件,打开它。
- 点击 ADD 添加 PWM 配置
添加 4 个配置
基本上四个配置差不多,出了引脚名称和引脚号不同!
- 配置 PWM
Ctrl + S保存配置文件Ctrl + B构建工一次工程(可能会报错,我们不用管!)然后我们所有设定的引脚和功能就会在 board.h 中定义。因为这个文件我们包含进了 tjx_init.h 所以我们只需要引用 tjx_init.h 即可。【这里的 tjx_init.h 就充当了芯片头文件的作用】
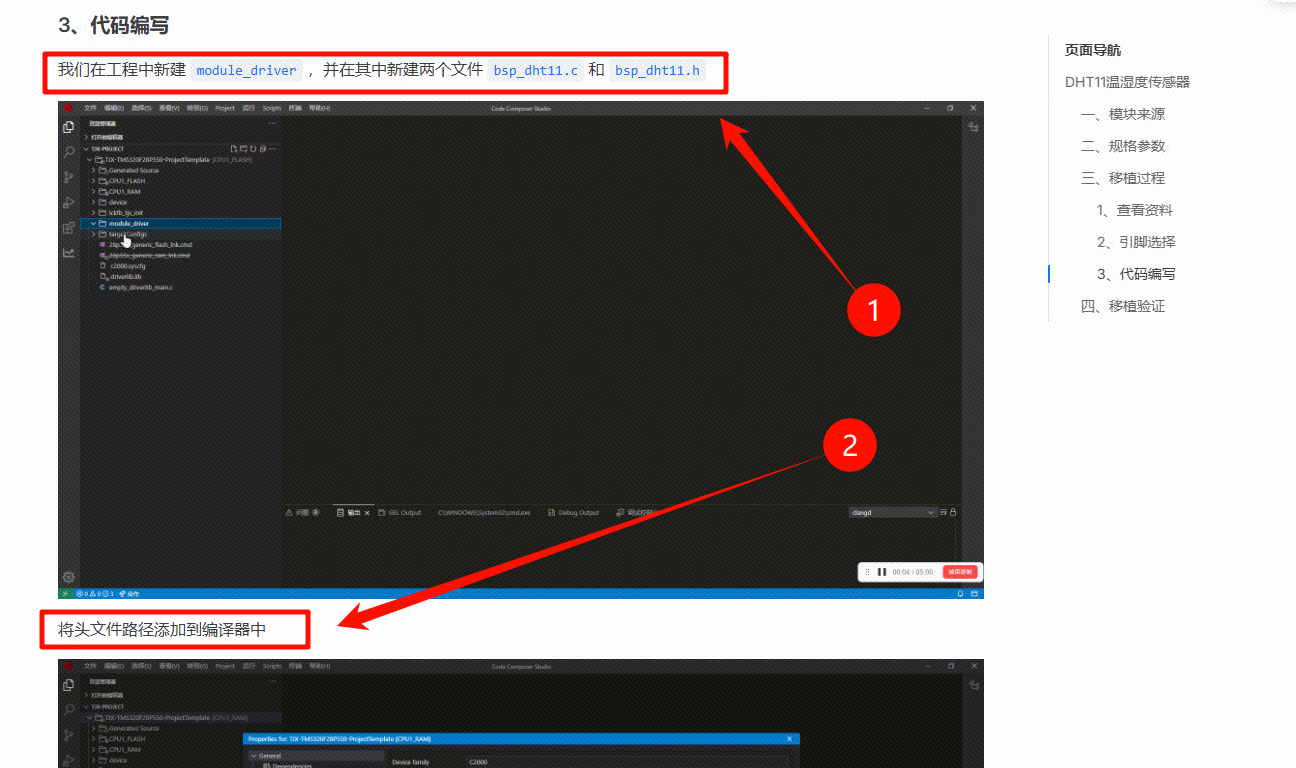
3、代码编写
我们在工程中新建 module_driver ,并在其中新建两个文件 bsp_l298n.c 和 bsp_l298n.h,并且将头文件路径添加到编译器中。
在文件bsp_l298n.c中,编写如下代码。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#include "bsp_l298n.h"
/******************************************************************
* 函 数 名 称:AB_Motor_Stop
* 函 数 说 明:AB端口电机停止
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LCKFB
* 备 注:无
******************************************************************/
void AB_Motor_Stop(void)
{
//AIN1输出
EPWM_setCounterCompareValue(Module_PWM1_BASE, EPWM_COUNTER_COMPARE_B, 0);
//AIN2输出
EPWM_setCounterCompareValue(Module_PWM2_BASE, EPWM_COUNTER_COMPARE_B, 0);
//AIN3输出
EPWM_setCounterCompareValue(Module_PWM3_BASE, EPWM_COUNTER_COMPARE_B, 0);
//AIN4输出
EPWM_setCounterCompareValue(Module_PWM4_BASE, EPWM_COUNTER_COMPARE_B, 0);
}
/******************************************************************
* 函 数 名 称:A_Motor_Control
* 函 数 说 明:A端口电机控制
* 函 数 形 参:dir旋转方向 1正转0反转 speed旋转速度,范围(0 ~ per-1)
* 函 数 返 回:无
* 作 者:LCKFB
* 备 注:无
******************************************************************/
void A_Motor_Control(uint8_t dir, uint16_t speed)
{
if( dir == 1 )
{
//AIN1输出
EPWM_setCounterCompareValue(Module_PWM1_BASE, EPWM_COUNTER_COMPARE_B, 0);
//AIN2输出
EPWM_setCounterCompareValue(Module_PWM2_BASE, EPWM_COUNTER_COMPARE_B, speed);
}
else
{
//AIN1输出
EPWM_setCounterCompareValue(Module_PWM1_BASE, EPWM_COUNTER_COMPARE_B, speed);
//AIN2输出
EPWM_setCounterCompareValue(Module_PWM2_BASE, EPWM_COUNTER_COMPARE_B, 0);
}
}
/******************************************************************
* 函 数 名 称:B_Motor_Control
* 函 数 说 明:B端口电机控制
* 函 数 形 参:dir旋转方向 1正转0反转 speed旋转速度,范围(0 ~ per-1)
* 函 数 返 回:无
* 作 者:LCKFB
* 备 注:无
******************************************************************/
void B_Motor_Control(uint8_t dir, uint16_t speed)
{
if( dir == 1 )
{
//AIN3输出
EPWM_setCounterCompareValue(Module_PWM3_BASE, EPWM_COUNTER_COMPARE_B, 0);
//AIN4输出
EPWM_setCounterCompareValue(Module_PWM4_BASE, EPWM_COUNTER_COMPARE_B, speed);
}
else
{
//AIN3输出
EPWM_setCounterCompareValue(Module_PWM3_BASE, EPWM_COUNTER_COMPARE_B, speed);
//AIN4输出
EPWM_setCounterCompareValue(Module_PWM4_BASE, EPWM_COUNTER_COMPARE_B, 0);
}
}在文件bsp_l298n.h中,编写如下代码。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#ifndef _BSP_L298N_H
#define _BSP_L298N_H
#include "tjx_init.h"
void AB_Motor_Stop(void);
void A_Motor_Control(uint8_t dir, uint16_t speed);
void B_Motor_Control(uint8_t dir, uint16_t speed);
#endif /* BSP_L298N_H */四、移植验证
在 empty_driverlib_main.c 中输入代码如下:
#include "driverlib.h"
#include "device.h"
#include "board.h"
#include "c2000ware_libraries.h"
#include "tjx_init.h"
#include "bsp_l298n.h"
// 延时时间是:time * 3
// 单位ms
void RGB_Blink_Delay(int time)
{
// RGB的B灯亮起,G灯熄灭
GPIO_writePin(RGB_B, 0);
GPIO_writePin(RGB_G, 1);
delay_ms(time);
// RGB的G灯亮起,B灯熄灭
GPIO_writePin(RGB_B, 1);
GPIO_writePin(RGB_G, 0);
delay_ms(time);
// RGB的B和G都熄灭
GPIO_writePin(RGB_B, 1);
GPIO_writePin(RGB_G, 1);
delay_ms(time);
}
void main(void)
{
/* The initialization code automatically generated by CCS [Start] */
Device_init();
Device_initGPIO();
Interrupt_initModule();
Interrupt_initVectorTable();
Board_init();
C2000Ware_libraries_init();
EINT;
ERTM;
/* The initialization code automatically generated by CCS [End] */
lc_printf("\r\n= = = = = = = = = = = = = = = = = = = = = = = = =\r\n");
lc_printf("\r\n=== Welcome to use the LC-TJX-TMS320F28P550 ====\r\n");
lc_printf("\r\n============== www.lckfb.com ===================\r\n");
lc_printf("\r\n============== wiki.lckfb.com ==================\r\n");
lc_printf("\r\n= = = = = = = = = = = = = = = = = = = = = = = = =\r\n");
AB_Motor_Stop();
RGB_Blink_Delay(300); // 300ms * 3
uint16_t i = 0;
while(1)
{
// 电机[正转]加速
for(; i < 1000; i += 50)
{
A_Motor_Control(1, i);
B_Motor_Control(1, i);
RGB_Blink_Delay(100); // delay * 3
}
// 电机[正转]减速
for(; i > 0; i -= 50)
{
A_Motor_Control(1, i);
B_Motor_Control(1, i);
RGB_Blink_Delay(100); // delay * 3
}
// 电机[反转]加速
for(; i < 1000; i += 50)
{
A_Motor_Control(0, i);
B_Motor_Control(0, i);
RGB_Blink_Delay(100); // delay * 3
}
// 电机[反转]减速
for(; i > 0; i -= 50)
{
A_Motor_Control(0, i);
B_Motor_Control(0, i);
RGB_Blink_Delay(100); // delay * 3
}
}
}
__interrupt void INT_Debug_Serial_RX_ISR(void)
{
//清除接收中断标志位
SCI_clearInterruptStatus(SCIA_BASE, SCI_INT_RXFF);
//清除中断标志位
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP9);
}【代码下载】
- 跳转到
下载中心去下载CCS模块移植代码:【点击跳转🚀】