双轴按键游戏摇杆模块,采用 PS2游戏手柄上金属按键摇杆电位器。模块特设二路模拟输出和一路数字输出接口、输出值分别对应(X、Y)双轴偏移量、其类型为模拟量、按键表示用户是否在Z轴上按下、其类型为数字开关量、用其可以轻松控制物体,在二维空间运动、因此可以通控制器编程、传感器扩展板插接、完成具有创意性遥控互动作品。
一、模块来源
二、规格参数
驱动电压:3.3V~5V
控制方式:ADC+GPIO
以上信息见厂家资料文件
三、移植过程
我们的目标是将例程移植至开发板上【能够控制电机旋转速度的功能】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
1、查看资料
输出信号:模块特设二路模拟输出(VRX,VRY)和一路数字输出接口(SW),二路模拟输出值分别对应(X,Y)双轴偏移量,其类型为模拟量;按键表示用户是否在Z轴上按下,其类型为数字开关量。
十字摇杆为一个双向的10K电阻器,随着摇杆方向不同,抽头的阻值随着变化。本模块如果使用5V供电,原始状态下X,Y读出电压为2.5V左右,当随箭头方向按下,读出电压值减少,限小为0V。
2、引脚选择
| GND | GND |
| +5V | 3V3 |
| VRX | GPIO-A6 |
| VRY | GPIO-A7 |
| SW | GPIO54 |
接下来我们配置 SYSCONFIG
- 双击 c2000.syscfg 文件,打开它。
- 点击 ADD 添加配置
- 配置
- 点击ADD添加GPIO配置
- 配置GPIO
Ctrl + S保存配置文件Ctrl + B构建工一次工程(可能会报错,我们不用管!)然后我们所有设定的引脚和功能就会在 board.h 中定义。因为这个文件我们包含进了 tjx_init.h 所以我们只需要引用 tjx_init.h 即可。【这里的 tjx_init.h 就充当了芯片头文件的作用】
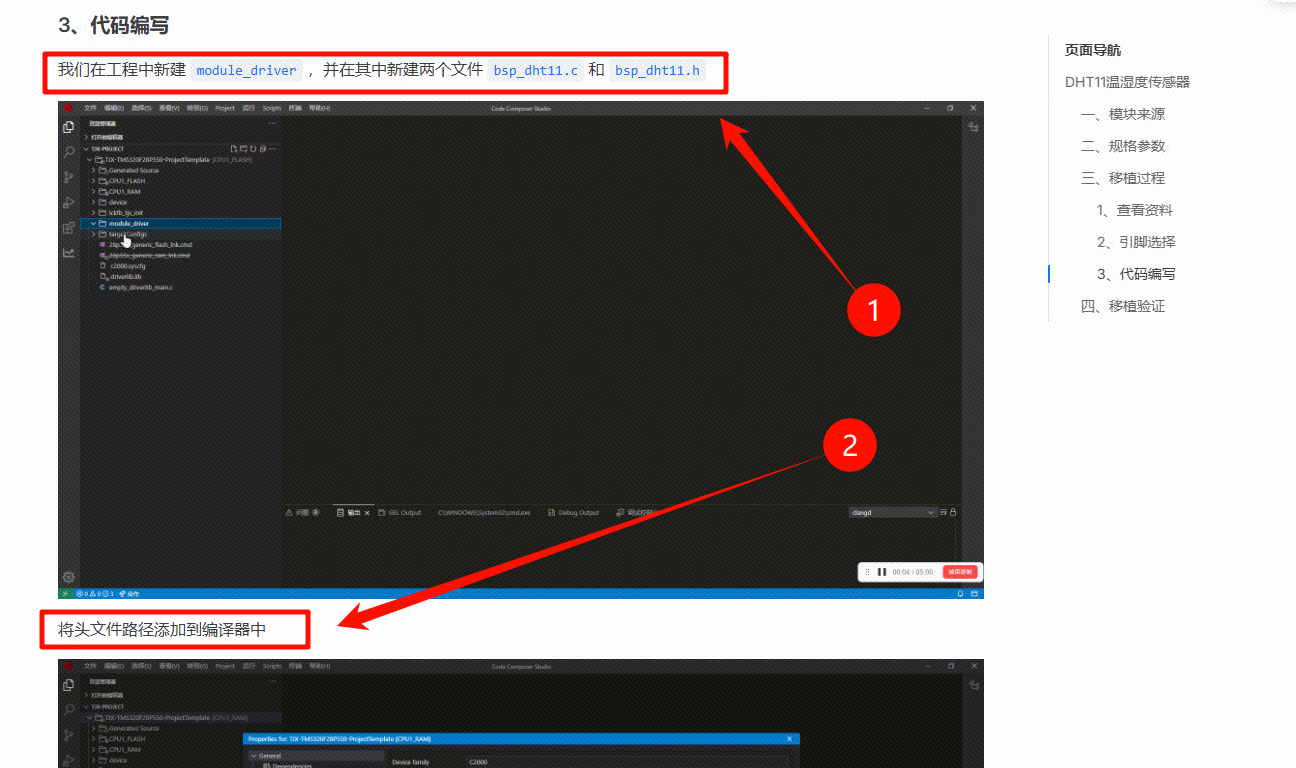
3、代码编写
我们在工程中新建 module_driver ,并在其中新建两个文件 bsp_rock.c 和 bsp_rock.h,并且将头文件路径添加到编译器中。
在文件 bsp_rock.c 中,编写如下代码。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#include "bsp_rock.h"
#include "stdio.h"
/**********************************************************
* 函 数 名 称:ADC_GET
* 函 数 功 能:读取一次ADC数据
* 传 入 参 数:CHx:读取通道是X还是Y
* 函 数 返 回:无
* 作 者:LCKFB
* 备 注:LP
**********************************************************/
static uint16_t ADC_GET(uint8_t CHx)
{
uint16_t gAdcResult = 0;
uint16_t timeOut = 200;
uint16_t CH_Force = 0;
uint16_t CH_Number = 0;
if(CHx == 0){
CH_Force = Module_ADC_FORCE_SOC0;
CH_Number = Module_ADC_SOC0;
}else if(CHx == 1){
CH_Force = Module_ADC_FORCE_SOC1;
CH_Number = Module_ADC_SOC1;
}else{
lc_printf("CHx Error!!\r\n");
return 1;
}
// 通过软件触发 SOC 转换
ADC_forceMultipleSOC(Module_ADC_BASE, CH_Force);
// 等待ADC总线处理完成
while(ADC_isBusy(Module_ADC_BASE) && timeOut--)
{
delay_us(5);
}
if(!timeOut)
{
lc_printf("ADC_GET Failed!!!\r\n");
return 1;
}
// 获取通道的转换结果
gAdcResult = ADC_readResult(Module_ADC_RESULT_BASE, CH_Number);
// lc_printf("gAdcResult = %d\r\n",gAdcResult);
return gAdcResult;
}
/******************************************************************
* 函 数 名 称:Get_Adc_Joystick_Value
* 函 数 说 明:对保存的数据进行平均值计算后输出
* 函 数 形 参:CHx 那个通道值
* 函 数 返 回:对应扫描的ADC值
* 作 者:LCKFB
* 备 注:无
******************************************************************/
uint16_t Get_Adc_Joystick_Value(uint8_t CHx)
{
uint16_t Data = 0;
int i;
for(i = 0; i < SAMPLES; i++)
{
Data += ADC_GET(CHx);
delay_ms(10);
}
Data = Data / SAMPLES;
return Data;
}
/******************************************************************
* 函 数 名 称:Get_MQ2_Percentage_value
* 函 数 说 明:读取摇杆值,并且返回百分比
* 函 数 形 参:0=读取摇杆左右值,1=读取摇杆上下值
* 函 数 返 回:返回百分比
* 作 者:LCKFB
* 备 注:无
******************************************************************/
uint16_t Get_Joystick_Percentage_value(uint8_t dir)
{
uint16_t adc_new = 0;
uint16_t Percentage_value = 0;
if( dir == 0 )
{
adc_new = Get_Adc_Joystick_Value(0); // 通道0:X的值
}
else if( dir == 1 )
{
adc_new = Get_Adc_Joystick_Value(1); // 通道1:Y的值
}
else
{
lc_printf("\nCH Error!!\r\n");
}
Percentage_value = (uint16_t)(((float)adc_new/4095.0f) * 100.f);
return Percentage_value;
}
/******************************************************************
* 函 数 名 称:Get_SW_state
* 函 数 说 明:读取摇杆是否有按下
* 函 数 形 参:无
* 函 数 返 回:0摇杆被按下 1摇杆没有按下
* 作 者:LCKFB
* 备 注:无
******************************************************************/
uint8_t Get_SW_state(void)
{
//如果被按下
if( GET_SW == 0 )
{
return 0;
}
else
{
return 1;
}
}在文件 bsp_rock.h 中,编写如下代码。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#ifndef __BSP_ROCK_H__
#define __BSP_ROCK_H__
#include "tjx_init.h"
#define GET_SW GPIO_readPin(GPIO_SW)
// 采样次数
#define SAMPLES 5
uint16_t Get_Joystick_Percentage_value(uint8_t dir);
uint8_t Get_SW_state(void);
#endif /* __BSP_ROCK_H__ */四、移植验证
在 empty_driverlib_main.c 中输入代码如下:
#include "driverlib.h"
#include "device.h"
#include "board.h"
#include "c2000ware_libraries.h"
#include "tjx_init.h"
#include "bsp_rock.h"
void main(void)
{
/* The initialization code automatically generated by CCS [Start] */
Device_init();
Device_initGPIO();
Interrupt_initModule();
Interrupt_initVectorTable();
Board_init();
C2000Ware_libraries_init();
EINT;
ERTM;
/* The initialization code automatically generated by CCS [End] */
lc_printf("\r\n= = = = = = = = = = = = = = = = = = = = = = = = =\r\n");
lc_printf("\r\n=== Welcome to use the LC-TJX-TMS320F28P550 ====\r\n");
lc_printf("\r\n============== www.lckfb.com ===================\r\n");
lc_printf("\r\n============== wiki.lckfb.com ==================\r\n");
lc_printf("\r\n= = = = = = = = = = = = = = = = = = = = = = = = =\r\n");
while(1)
{
if( Get_SW_state() == 0 )
{
lc_printf("Key SW Down!!\r\n");
}
lc_printf("\r\n");
lc_printf("X = [%d]\r\n",Get_Joystick_Percentage_value(0));
lc_printf("Y = [%d]\r\n",Get_Joystick_Percentage_value(1));
// RGB的B灯亮起,G灯熄灭
GPIO_writePin(RGB_B, 0);
GPIO_writePin(RGB_G, 1);
delay_ms(20);
// RGB的G灯亮起,B灯熄灭
GPIO_writePin(RGB_B, 1);
GPIO_writePin(RGB_G, 0);
delay_ms(20);
// RGB的B和G都熄灭
GPIO_writePin(RGB_B, 1);
GPIO_writePin(RGB_G, 1);
delay_ms(20);
}
}
__interrupt void INT_Debug_Serial_RX_ISR(void)
{
//清除接收中断标志位
SCI_clearInterruptStatus(SCIA_BASE, SCI_INT_RXFF);
//清除中断标志位
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP9);
}上电效果:
【代码下载】
- 跳转到
下载中心去下载CCS模块移植代码:【点击跳转🚀】