资料链接
https://wiki.lckfb.com/zh-hans/lushan-pi-k230/
颜色阈值的设置
在 K230-CanMV 中,使用到颜色识别,就避免不了需要对应颜色的阈值,通过阈值去查找到指定的颜色。
【这里以红色阈值设置为案例】
1、使用 CanMV IDE K230 连接摄像头
打开 CanMV IDE K230,连接上 K230-CanMV 摄像头。
调用摄像头教程:https://wiki.lckfb.com/zh-hans/lushan-pi-k230/image-recog/use-sensor.html
2、开启 CanMV IDE K230 采集颜色
案例是识别红色。我使用电脑上的画图软件,画出一个矩形。
然后使用摄像头采集图像数据到IDE。
3、打开阈值编辑器
在弹出的窗口中,选择帧缓冲区。
4、获取颜色阈值
通过调整滑块,将我们需要识别的颜色调整为白色,其他颜色调整为黑色。完成之后下方的LAB阈值就是颜色阈值了
案例一:串口通信
实现目标
使用 CanMV IDE K230 采集最大色块的中心位置,通过串口自定义格式 发送给开发板。
CanMV IDE K230 代码
内容讲解:查找图像中最大红色色块,通过串口2输出数据格式 "[%d,%d]" 给开发板的串口。
# 立创·庐山派-K230-CanMV开发板资料与相关扩展板软硬件资料官网全部开源
# 开发板官网:www.lckfb.com
# 技术支持常驻论坛,任何技术问题欢迎随时交流学习
# 立创论坛:www.jlc-bbs.com/lckfb
# 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
# 不靠卖板赚钱,以培养中国工程师为己任
import time, os, sys
from media.sensor import *
from media.display import *
from media.media import *
from machine import UART
from machine import FPIOA
# 配置引脚
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.UART2_TXD)
fpioa.set_function(12, FPIOA.UART2_RXD)
sensor_id = 2
sensor = None
# 初始化UART2,波特率115200,8位数据位,无校验,1位停止位
uart = UART(UART.UART2, baudrate=115200, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
#白色 颜色阈值
white_threshold = (53, 33, 11, 101, -124, 127)
# 查找最大色块函数
def find_max(blobs):
max_size=0
# 把blobs每个元素代入变量blob
for blob in blobs:
# 如果当前色块的像素量 跟之前比 是最多的
if blob.pixels() > max_size:
# 记录这个最多像素量的色块
max_blob=blob
# 更新最大像素量
max_size = blob.pixels()
return max_blob
uart.write("Hello World!\r") # 通过串口2输出固定字符串 “Hello World!”
try:
# 构造一个具有默认配置的摄像头对象
sensor = Sensor(id=sensor_id)
# 重置摄像头sensor
sensor.reset()
# 无需进行镜像翻转
# 设置水平镜像
# sensor.set_hmirror(False)
# 设置垂直翻转
# sensor.set_vflip(False)
# 设置通道0的输出尺寸为1920x1080
sensor.set_framesize(Sensor.VGA, chn=CAM_CHN_ID_0)
# 设置通道0的输出像素格式为RGB888
sensor.set_pixformat(Sensor.RGB565, chn=CAM_CHN_ID_0)
# 使用IDE的帧缓冲区作为显示输出
Display.init(Display.VIRT, width=640, height=480, to_ide=True)
# 初始化媒体管理器
MediaManager.init()
# 启动传感器
sensor.run()
while True:
os.exitpoint()
# 捕获通道0的图像
img = sensor.snapshot(chn=CAM_CHN_ID_0)
# 在img对象中根据 传入的颜色阈值(white_threshold) 查找色块
blobs = img.find_blobs( [ white_threshold ] )
# 如果色块数量不为0
if blobs:
# 找到最大色块
max_blob=find_max(blobs)
# 在img图像中 对查找到的色块 画一个矩形
# blobs.rect() 色块的矩形参数
# draw_rectangle 画一个矩形框
img.draw_rectangle(max_blob.rect())
# 在图像上绘制一个十字。 cx代表中心x点 cy表示中心y点
img.draw_cross(max_blob.cx(), max_blob.cy())
# 整理字符串 将最大色块的 中心xy点 按照%d格式,格式化字符串
output_str="[%d,%d]" % ( max_blob.cx(), max_blob.cy() )
# 在IDE中输出字符串
print( 'Maximum color block position : ' + output_str + '\r\n' )
# 通过串口2输出字符串
uart.write( output_str + '\r\n' )
# 显示捕获的图像
Display.show_image(img)
except KeyboardInterrupt as e:
print("用户停止: ", e)
except BaseException as e:
print(f"异常: {e}")
finally:
# 停止传感器运行
if isinstance(sensor, Sensor):
sensor.stop()
# 反初始化显示模块
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
# 释放媒体缓冲区
MediaManager.deinit()开发板配置

| VCC(可以不接) | 5V0 |
| GND | GND |
| TXD | GPIO57 |
| RXD | GPIO56 |
接下来我们配置 SYSCONFIG
- 双击 c2000.syscfg 文件,打开它。
- 点击 ADD 添加配置
- 配置
Ctrl + S保存配置文件Ctrl + B构建工一次工程(可能会报错,我们不用管!)然后我们所有设定的引脚和功能就会在 board.h 中定义。因为这个文件我们包含进了 tjx_init.h 所以我们只需要引用 tjx_init.h 即可。【这里的 tjx_init.h 就充当了芯片头文件的作用】
开发板代码
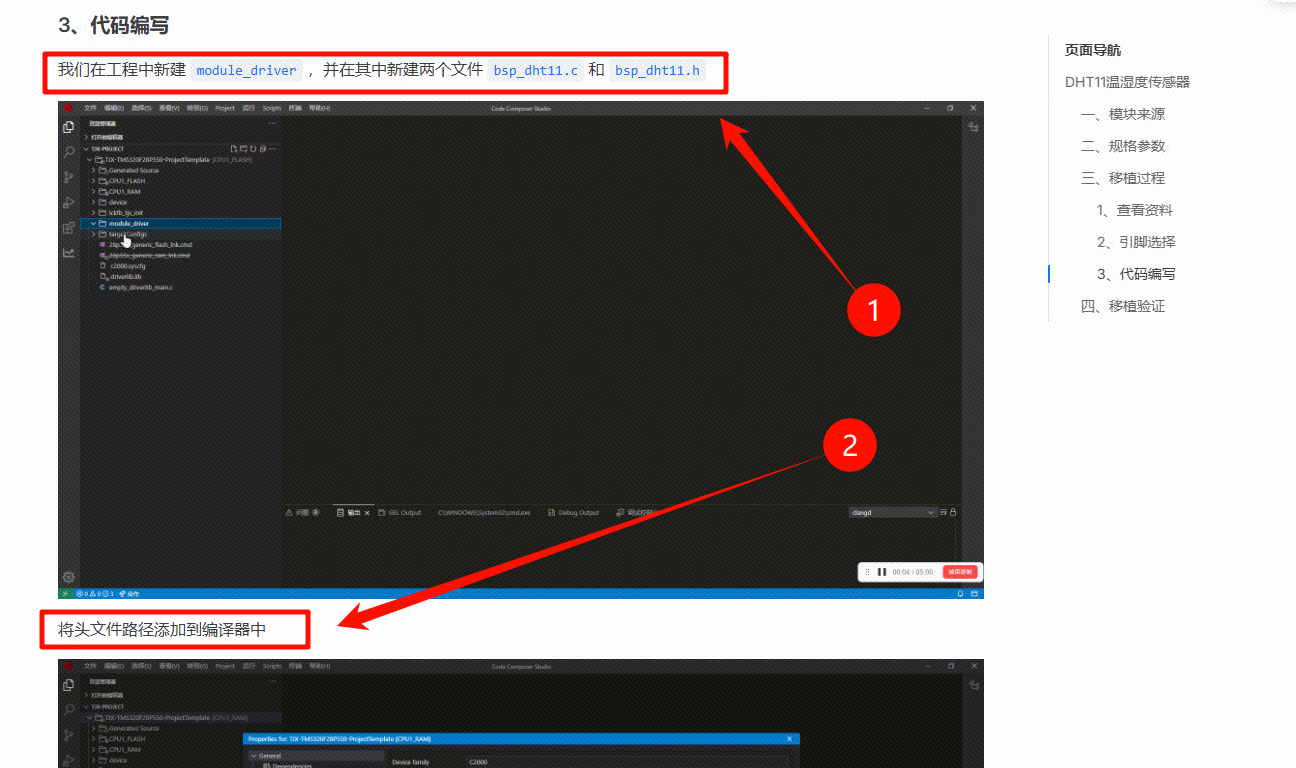
我们在工程中新建 module_driver ,并在其中新建两个文件 bsp_k230canmv.c 和 bsp_k230canmv.h,并且将头文件路径添加到编译器中。
在文件bsp_k230canmv.c中,编写如下代码。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#include "bsp_k230canmv.h"
#include "stdio.h"
#include "string.h"
/* 串口缓冲区的数据长度 */
#define K230_CANMV_USART_RECEIVE_LENGTH 100
uint8_t k230canmv_recv_buff[K230_CANMV_USART_RECEIVE_LENGTH]; // 接收缓冲区
volatile int k230canmv_recv_length = 0; // 接收数据长度
volatile char k230canmv_recv_flag = 0; // 接收数据完成标志位
void Clear_Recv_Buff(void)
{
// 清除接收完成标志位
k230canmv_recv_flag = 0;
// 清楚数据长度
k230canmv_recv_length = 0;
// 清除数据
memset(k230canmv_recv_buff, 0, K230_CANMV_USART_RECEIVE_LENGTH);
}
/******************************************************************
* 函 数 名 称:K230CanMV_DataAnalysis
* 函 数 说 明:解析K230 发送过来的自定义格式数据 [%d,%d] 解析
* 函 数 形 参:dat_buff:回传数据地址 buff_length:存储空间长度单位char
* 函 数 返 回: 0: 成功
* 1:未接到数据
* 2:未找到格式的头的第一个 '['
* 3:未找到找到结尾的 ']'
* 作 者:LCKFB
* 备 注:LP
******************************************************************/
uint8_t K230CanMV_DataAnalysis(uint8_t *dat_buff, uint8_t buff_length)
{
int head = 0, end = 0;
if (k230canmv_recv_flag == 0) return 1;
// 禁止 Module 串口接收中断
Interrupt_disable(INT_Module_Serial_RX);
#if K230_CANMV_DEBUG
lc_printf("RAW: %s\r\n", k230canmv_recv_buff);
#endif
// 找 '['
while (head < k230canmv_recv_length && k230canmv_recv_buff[head] != '[') {
head++;
}
if (head == k230canmv_recv_length) {
Clear_Recv_Buff();
Interrupt_enable(INT_Module_Serial_RX);
return 2;
}
// 从 head 开始再找 ']'
while (end < k230canmv_recv_length && k230canmv_recv_buff[head + end] != ']') {
end++;
}
if (end == k230canmv_recv_length) {
Clear_Recv_Buff();
Interrupt_enable(INT_Module_Serial_RX);
return 3;
}
// 复制 '[…]' 到 dat_buff
uint8_t len = end + 1; // 包括 ']' 的长度
if (len < buff_length) {
memcpy(dat_buff, &k230canmv_recv_buff[head], len);
dat_buff[len] = '\0';
#if K230_CANMV_DEBUG
lc_printf("PARSED: %s\r\n", dat_buff);
#endif
} else {
lc_printf("Data too large!\r\n");
}
Clear_Recv_Buff();
Interrupt_enable(INT_Module_Serial_RX);
return 0;
}
// module串口的中断服务函数
__interrupt void INT_Module_Serial_RX_ISR(void)
{
// 检查是否还有空间接收新数据
if (k230canmv_recv_length < K230_CANMV_USART_RECEIVE_LENGTH - 1) // 保留一个字符的空间用于'\0'
{
k230canmv_recv_buff[k230canmv_recv_length++] = SCI_readCharBlockingNonFIFO(Module_Serial_BASE); // 接收数据
}
else
{
uint8_t temp = SCI_readCharBlockingNonFIFO(Module_Serial_BASE); // 不保存数据
}
k230canmv_recv_buff[k230canmv_recv_length] = '\0'; // 确保字符串正确结束
k230canmv_recv_flag = 1; // 设置接收完成标志位
SCI_clearInterruptStatus(Module_Serial_BASE, SCI_INT_RXFF);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP9);
}在文件bsp_k230canmv.h中,编写如下代码。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 文档网站:wiki.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 嘉立创社区问答:https://www.jlc-bbs.com/lckfb
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*/
#ifndef __BSP_K230CANMV_H__
#define __BSP_K230CANMV_H__
#include "tjx_init.h"
#define K230_CANMV_DEBUG 0
uint8_t K230CanMV_DataAnalysis(uint8_t *dat_buff, uint8_t buff_length);
void Clear_Recv_Buff(void);
#endif案例验证
在 empty_driverlib_main.c 中输入代码如下:
#include "driverlib.h"
#include "device.h"
#include "board.h"
#include "c2000ware_libraries.h"
#include "tjx_init.h"
#include "bsp_k230canmv.h"
void main(void)
{
/* The initialization code automatically generated by CCS [Start] */
Device_init();
Device_initGPIO();
Interrupt_initModule();
Interrupt_initVectorTable();
Board_init();
C2000Ware_libraries_init();
EINT;
ERTM;
/* The initialization code automatically generated by CCS [End] */
lc_printf("\r\n= = = = = = = = = = = = = = = = = = = = = = = = =\r\n");
lc_printf("\r\n=== Welcome to use the LC-TJX-TMS320F28P550 ====\r\n");
lc_printf("\r\n============== www.lckfb.com ===================\r\n");
lc_printf("\r\n============== wiki.lckfb.com ==================\r\n");
lc_printf("\r\n= = = = = = = = = = = = = = = = = = = = = = = = =\r\n");
while(1)
{
uint8_t dat_buff[50] = {0};
uint8_t ret = K230CanMV_DataAnalysis(&dat_buff, 50);
// 解析 lspi K230CanMV 发送过来的数据
if(ret == 0){
lc_printf("RcvData = %s\r\n", dat_buff);
}
else if(ret == 1){
lc_printf("Flag == 0\r\n");
}
else if(ret == 2){
lc_printf("NO Find Head!!\r\n");
}
else if(ret == 3){
lc_printf("NO Find end!!\r\n");
}
// RGB的B灯亮起,G灯熄灭
GPIO_writePin(RGB_B, 0);
GPIO_writePin(RGB_G, 1);
delay_ms(50);
// RGB的G灯亮起,B灯熄灭
GPIO_writePin(RGB_B, 1);
GPIO_writePin(RGB_G, 0);
delay_ms(50);
// RGB的B和G都熄灭
GPIO_writePin(RGB_B, 1);
GPIO_writePin(RGB_G, 1);
delay_ms(50);
}
}
__interrupt void INT_Debug_Serial_RX_ISR(void)
{
//清除接收中断标志位
SCI_clearInterruptStatus(SCIA_BASE, SCI_INT_RXFF);
//清除中断标志位
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP9);
}上电效果:输出 K230 识别到的数据。
代码下载链接
【代码下载】
- 跳转到
下载中心去下载CCS模块移植代码:【点击跳转🚀】
案例二:任意颜色线循迹
开发板代码
案例一:串口通信
CanMV IDE K230 代码
代码说明:实现任意颜色的寻线,需要知道线的颜色和位置。线的颜色识别通过色块查找的方式;而位置的判断,通过识别出线的颜色之后,在识别到的区域中心画一个十字型符号‘+’,并记录该色块中心位置命名为x_location。
如何识别线的颜色?通过寻找色块函数 find_blobs() 进行查找
将x_location与图像的X轴中心作比较,就可以得到线的位置Line_position。其中图像的X轴中心命名为centre
当 x_location > centre 时,Line_position设置为正数,x_location 越大,则Line_position 越大。
当 x_location < centre 时,Line_position设置为负数,x_location 越小,则Line_position 越小。
当 x_location = centre 时,Line_position设置为0。
如何实现循迹?
将 K230放 置在中间位置。
当Line_position 为负数,说明识别到线在图像的左侧。我们需要控制小车左转。
当Line_position 为正数,说明识别到线在图像的右侧。我们需要控制小车右转。
当Line_position 为0 , 说明识别到线在图像的中间。我们往前直行。
需要注意的是,线的颜色不可以和背景色相同,否则该案例失效。
# 立创·庐山派-K230-CanMV开发板资料与相关扩展板软硬件资料官网全部开源
# 开发板官网:www.lckfb.com
# 技术支持常驻论坛,任何技术问题欢迎随时交流学习
# 立创论坛:www.jlc-bbs.com/lckfb
# 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
# 不靠卖板赚钱,以培养中国工程师为己任
import time, os, sys, math
import json
from media.sensor import *
from media.display import *
from media.media import *
from machine import UART
from machine import FPIOA
# 修改这里的颜色阈值可以做到任意颜色识别循迹
GRAYSCALE_THRESHOLD = (0, 42, 22, -41, 27, -23)
# 识别颜色的矩形区域
Identification_region = [0, 220, 640, 45]
# 色块的X轴位置
x_location = 0
# 图像的X轴中心
centre = 0
# 线的位置
Line_position = 0
# 配置引脚
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.UART2_TXD)
fpioa.set_function(12, FPIOA.UART2_RXD)
sensor_id = 2
sensor = None
# 初始化UART2,波特率115200,8位数据位,无校验,1位停止位
uart = UART(UART.UART2, baudrate=115200, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
uart.write("Hello World!\r") # 通过串口2输出固定字符串 “Hello World!”
try:
# 构造一个具有默认配置的摄像头对象
sensor = Sensor(id=sensor_id)
# 重置摄像头sensor
sensor.reset()
# 无需进行镜像翻转
# 设置水平镜像
# sensor.set_hmirror(False)
# 设置垂直翻转
# sensor.set_vflip(False)
# 设置通道0的输出尺寸为640x480
sensor.set_framesize(Sensor.VGA, chn=CAM_CHN_ID_0)
# 设置通道0的输出像素格式为RGB565
sensor.set_pixformat(Sensor.RGB565, chn=CAM_CHN_ID_0)
# 使用IDE的帧缓冲区作为显示输出
Display.init(Display.VIRT, width=640, height=480, to_ide=True)
# 初始化媒体管理器
MediaManager.init()
# 启动传感器
sensor.run()
while True:
os.exitpoint()
# 捕获通道0的图像
img = sensor.snapshot(chn=CAM_CHN_ID_0)
# 设置图像的X轴中心
centre = (img.width() / 2)
# 寻找 颜色阈值【GRAYSCALE_THRESHOLD】设置的颜色
blobs = img.find_blobs([GRAYSCALE_THRESHOLD], roi=Identification_region, merge=True)
# roi 是感兴趣区域的矩形元组(x,y,w,h)。如果指定[10,10,20,20],则在以(10,10)为起点的位置,以长宽都为20的大小查找色块
# 如果roi未指定,ROI即整个图像的图像矩形。 操作范围仅限于 roi 区域内的像素。
# merge 若为True,则合并所有没有被过滤掉的色块,这些色块的边界矩形互相交错重叠。
# 识别到色块
if blobs:
most_pixels = 0 # 最大色块的像素
largest_blob = 0 # 最大色块
for i in range(len(blobs)):
# 目标区域找到的颜色块(线段块)可能不止一个,找到最大的一个,作为本区域内的目标直线
if blobs[i].pixels() > most_pixels:
most_pixels = blobs[i].pixels() # 记录最大色块的像素
largest_blob = i # 记录最大色块
# 在查找到的最大色块处画矩形
img.draw_rectangle(blobs[largest_blob].rect(), thickness=5)
# 在最大色块的中心画一个十字
img.draw_cross(blobs[largest_blob].cx(), blobs[largest_blob].cy(), thickness=3)
# 记录中心点X轴位置
x_location = blobs[largest_blob].cx()
# 未识别到色块
else:
img.draw_string(2, 24, "!NONE!", color=(0, 0, 255), scale=2, mono_space=False)
x_location = centre
# 在图像的正中间画一个红色的十字,方便确定屏幕中间的位置
img.draw_cross(int(centre), int(img.height() / 2), color=(255, 0, 0), size=10)
# 在识别的区域内画蓝色矩形
img.draw_rectangle(Identification_region, color=(0, 0, 255), thickness=5)
# 计算色块距离屏幕中间的距离, (img.width() / 2)后,色块中心点在屏幕左边则是负值 色块中心点在屏幕右边则是正值
Line_position = "[%d]" % (x_location - centre)
# LCD显示图像,并在图像的(2,1)位置显示字符串output_str的内容,字符串颜色为蓝色,字体大小为6,字符间距不固定
img.draw_string(2, 1, "%s" % Line_position, color=(0, 0, 255), scale=6, mono_space=False)
# 通过串口2输出字符串
uart.write(Line_position + '\r\n')
# 小于-10输出左转
# 大于 10输出右转
# 在-10到10范围内则输出前进
num = x_location - centre
if -10 <= num <= 10:
print("前进")
elif num > 10:
print("右转")
elif num < -10:
print("左转")
# 输出
print(Line_position)
# 显示捕获的图像
Display.show_image(img)
except KeyboardInterrupt as e:
print("用户停止: ", e)
except BaseException as e:
print(f"异常: {e}")
finally:
# 停止传感器运行
if isinstance(sensor, Sensor):
sensor.stop()
# 反初始化显示模块
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
# 释放媒体缓冲区
MediaManager.deinit()案例验证
案例三:矩形识别与中心判断
开发板代码
案例一:串口通信
CanMV IDE K230 代码
# 立创·庐山派-K230-CanMV开发板资料与相关扩展板软硬件资料官网全部开源
# 开发板官网:www.lckfb.com
# 技术支持常驻论坛,任何技术问题欢迎随时交流学习
# 立创论坛:www.jlc-bbs.com/lckfb
# 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
# 不靠卖板赚钱,以培养中国工程师为己任
import time, os, sys, math
import json
from media.sensor import *
from media.display import *
from media.media import *
from machine import UART
from machine import FPIOA
# 配置引脚
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.UART2_TXD)
fpioa.set_function(12, FPIOA.UART2_RXD)
sensor_id = 2
sensor = None
# 初始化UART2,波特率115200,8位数据位,无校验,1位停止位
uart = UART(UART.UART2, baudrate=115200, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
uart.write("Hello World!\r") # 通过串口2输出固定字符串 “Hello World!”
# 查找最大矩形块函数
def find_max(rects):
rect_max=0
# 把blobs每个元素代入变量rect
for rect in rects:
# 如果当前矩形的宽 跟之前比 是最大的
if rect.w() > rect_max:
global max_rect
# 记录这个最多大的矩形
max_rect = rect
# 更新最大矩形宽度
rect_max = rect.w()
#返回这个最大矩形元素
return max_rect
try:
# 构造一个具有默认配置的摄像头对象
sensor = Sensor(id=sensor_id)
# 重置摄像头sensor
sensor.reset()
# 无需进行镜像翻转
# 设置水平镜像
# sensor.set_hmirror(False)
# 设置垂直翻转
# sensor.set_vflip(False)
# 设置通道0的输出尺寸为128x160
sensor.set_framesize(Sensor.QQVGA2, chn=CAM_CHN_ID_0)
# 设置通道0的输出像素格式为RGB565
sensor.set_pixformat(Sensor.RGB565, chn=CAM_CHN_ID_0)
# 使用IDE的帧缓冲区作为显示输出
Display.init(Display.VIRT, width=128, height=160, to_ide=True)
# 初始化媒体管理器
MediaManager.init()
# 启动传感器
sensor.run()
while True:
os.exitpoint()
# 捕获通道0的图像
img = sensor.snapshot(chn=CAM_CHN_ID_0)
# 查找到最大矩形块,查找范围x=0,y=20,w=128,h=120
rects = find_max(img.find_rects(roi=(0,20,128,120)))
# 将查找到的最大矩形画一个绿色的矩形框
img.draw_rectangle(rects.x(),rects.y(),rects.w(),rects.h(),color=(0,255,0))
# 计算矩形中心
#中心X定位:矩形像素宽度 / 2 + x轴起点位置
#中心Y定位:矩形像素高度 / 2 + y轴起点位置
x_central = (rects.w() / 2) + rects.x()
y_central = (rects.h() / 2) + rects.y()
#显示识别到的最大矩形中心的X,Y位置
img.draw_string(2,1,"x=%d y=%d"%(x_central,y_central))
#在查找到的矩形中心画一个蓝色的十字
img.draw_cross(int(x_central), int(y_central), color = (0, 0, 255), size = 5 )
#在查找区域画一个红色方框
#区域越小,帧数越高
img.draw_rectangle(0,20,128,120,color=(255,0,0))
# 显示捕获的图像
Display.show_image(img)
except KeyboardInterrupt as e:
print("用户停止: ", e)
except BaseException as e:
print(f"异常: {e}")
finally:
# 停止传感器运行
if isinstance(sensor, Sensor):
sensor.stop()
# 反初始化显示模块
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
# 释放媒体缓冲区
MediaManager.deinit()案例验证
案例四:任意角度矩形识别与边角定位
开发板代码
案例一:串口通信
CanMV IDE K230 代码
# 立创·庐山派-K230-CanMV开发板资料与相关扩展板软硬件资料官网全部开源
# 开发板官网:www.lckfb.com
# 技术支持常驻论坛,任何技术问题欢迎随时交流学习
# 立创论坛:www.jlc-bbs.com/lckfb
# 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
# 不靠卖板赚钱,以培养中国工程师为己任
import time, os, sys, math
import json
from media.sensor import *
from media.display import *
from media.media import *
from machine import UART
from machine import FPIOA
# 配置引脚
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.UART2_TXD)
fpioa.set_function(12, FPIOA.UART2_RXD)
sensor_id = 2
sensor = None
# 初始化UART2,波特率115200,8位数据位,无校验,1位停止位
uart = UART(UART.UART2, baudrate=115200, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
uart.write("Hello World!\r") # 通过串口2输出固定字符串 “Hello World!”
try:
# 构造一个具有默认配置的摄像头对象
sensor = Sensor(id=sensor_id)
# 重置摄像头sensor
sensor.reset()
# 无需进行镜像翻转
# 设置水平镜像
# sensor.set_hmirror(False)
# 设置垂直翻转
# sensor.set_vflip(False)
# 设置通道0的输出尺寸为128x160
sensor.set_framesize(Sensor.QVGA, chn=CAM_CHN_ID_0)
# 设置通道0的输出像素格式为RGB565
sensor.set_pixformat(Sensor.RGB565, chn=CAM_CHN_ID_0)
# 使用IDE的帧缓冲区作为显示输出
Display.init(Display.VIRT, width=320, height=240, to_ide=True)
# 初始化媒体管理器
MediaManager.init()
# 启动传感器
sensor.run()
while True:
os.exitpoint()
# 捕获通道0的图像
img = sensor.snapshot(chn=CAM_CHN_ID_0)
# 在图像中寻找矩形
for r in img.find_rects(threshold = 10000):
# 判断矩形边长是否符合要求
if r.w() > 20 and r.h() > 20:
# 在屏幕上框出矩形
img.draw_rectangle(r.rect(), color = (255, 0, 0), scale = 4)
# 获取矩形角点位置
corner = r.corners()
# 在屏幕上圈出矩形角点
img.draw_circle(corner[0][0], corner[0][1], 5, color = (255, 0, 0), thickness = 2, fill = False)
img.draw_circle(corner[1][0], corner[1][1], 5, color = (0, 255, 0), thickness = 2, fill = False)
img.draw_circle(corner[2][0], corner[2][1], 5, color = (0, 0, 255), thickness = 2, fill = False)
img.draw_circle(corner[3][0], corner[3][1], 5, color = (255, 255, 0), thickness = 2, fill = False)
# 打印四个角点坐标, 角点1的数组是corner[0], 坐标就是(corner[0][0],corner[0][1])
# 角点检测输出的角点排序每次不一定一致,矩形左上的角点有可能是corner0,1,2,3其中一个
left_down_dot ="LD=[%d,%d]"%(corner[0][0],corner[0][1]) #红色点
right_down_dot ="RD=[%d,%d]"%(corner[1][0],corner[1][1]) #绿色点
right_up_dot ="RU=[%d,%d]"%(corner[2][0],corner[2][1]) #蓝色点
left_up_dot ="LU=[%d,%d]"%(corner[3][0],corner[3][1]) #黄色点
print(left_up_dot + "\n" + left_down_dot + "\n" + right_up_dot + "\n" + right_down_dot)
# 显示捕获的图像
Display.show_image(img)
except KeyboardInterrupt as e:
print("用户停止: ", e)
except BaseException as e:
print(f"异常: {e}")
finally:
# 停止传感器运行
if isinstance(sensor, Sensor):
sensor.stop()
# 反初始化显示模块
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
# 释放媒体缓冲区
MediaManager.deinit()案例验证
案例五:激光识别与定位
将识别到的绿色激光以黑色方框圈出,并在IDE中输出激光XY轴位置。
开发板代码
案例一:串口通信
CanMV IDE K230 代码
# 立创·庐山派-K230-CanMV开发板资料与相关扩展板软硬件资料官网全部开源
# 开发板官网:www.lckfb.com
# 技术支持常驻论坛,任何技术问题欢迎随时交流学习
# 立创论坛:www.jlc-bbs.com/lckfb
# 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
# 不靠卖板赚钱,以培养中国工程师为己任
import time, os, sys, math
import json
from media.sensor import *
from media.display import *
from media.media import *
from machine import UART
from machine import FPIOA
# 配置引脚
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.UART2_TXD)
fpioa.set_function(12, FPIOA.UART2_RXD)
sensor_id = 2
sensor = None
# 初始化UART2,波特率115200,8位数据位,无校验,1位停止位
uart = UART(UART.UART2, baudrate=115200, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
uart.write("Hello World!\r") # 通过串口2输出固定字符串 “Hello World!”
try:
# 构造一个具有默认配置的摄像头对象
sensor = Sensor(id=sensor_id)
# 重置摄像头sensor
sensor.reset()
# 无需进行镜像翻转
# 设置水平镜像
# sensor.set_hmirror(False)
# 设置垂直翻转
# sensor.set_vflip(False)
# 设置通道0的输出尺寸为128x160
sensor.set_framesize(Sensor.QVGA, chn=CAM_CHN_ID_0)
# 设置通道0的输出像素格式为RGB565
sensor.set_pixformat(Sensor.RGB565, chn=CAM_CHN_ID_0)
# 使用IDE的帧缓冲区作为显示输出
Display.init(Display.VIRT, width=320, height=240, to_ide=True)
# 初始化媒体管理器
MediaManager.init()
# 启动传感器
sensor.run()
while True:
os.exitpoint()
# 捕获通道0的图像
img = sensor.snapshot(chn=CAM_CHN_ID_0)
# -----跟踪激光部分-----
# 设置绿色激光颜色阈值
G_td = [(98, 81, -48, 41, 14, 72)]
# 根据阈值找到色块
for b in img.find_blobs(G_td,pixels_threshold=2, area_threshold=15, merge=True,invert = 0):
# 在识别到的激光处画一个黑色矩形
img.draw_rectangle(b.rect(), color = (0, 0, 0), scale = 1, thickness = 2)
# 打印激光色块的中心位置
# 使用b.x()获取色块矩形左上角X坐标
# 使用b.y()获取色块矩形左上角Y坐标
# 使用b.w()获取色块矩形宽度
# 使用b.h()获取色块矩形高度
# 矩形中心坐标为(x + w/2,y + h/2)
print("[%d,%d]"%( (b.x() + b.w()/2), (b.y() + b.h()/2 ) ))
break
# 显示捕获的图像
Display.show_image(img)
except KeyboardInterrupt as e:
print("用户停止: ", e)
except BaseException as e:
print(f"异常: {e}")
finally:
# 停止传感器运行
if isinstance(sensor, Sensor):
sensor.stop()
# 反初始化显示模块
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
# 释放媒体缓冲区
MediaManager.deinit()案例验证
注意
如识别不出绿色,请按照颜色阈值的设置章节,配置你的绿色阈值。