 |  |
|---|
项目介绍
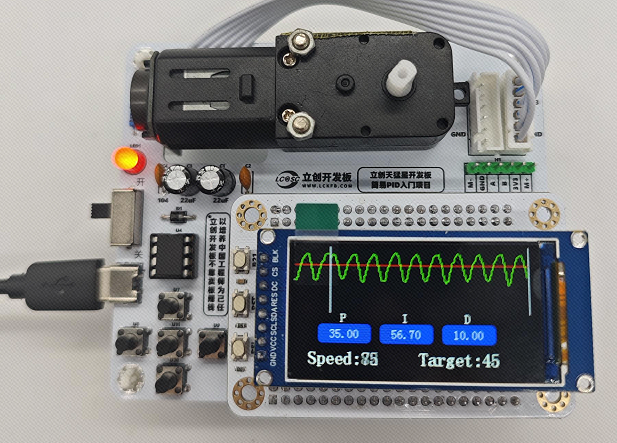
基于 立创·天猛星 MSPM0G3507 开发板制作的简易 PID 入门套件,对带编码器的电机,使用 PID 控制算法,实现 定速功能 和 定距功能,再通过屏幕显示出 PID 参数以及当前值与目标值的曲线变化。
硬件使用立创·天猛星 MSPM0G3507 开发板作为主控,BDR6126D 作为电机驱动,屏幕使用1.9寸中景园SPI屏幕。电机接口适配市场上大多数编码器电机接口。
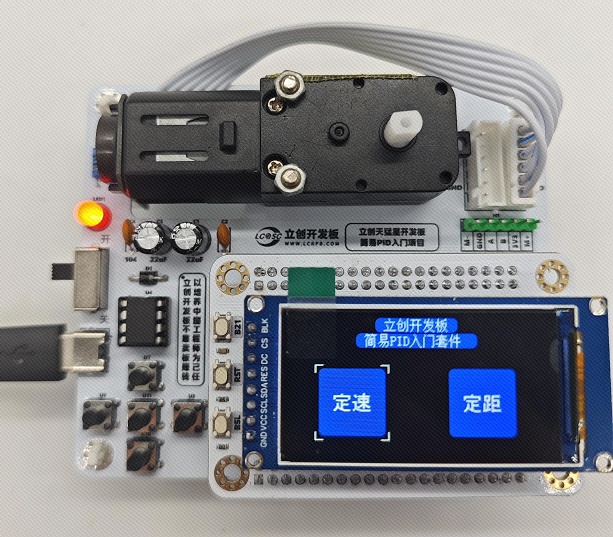
定速与定距功能说明
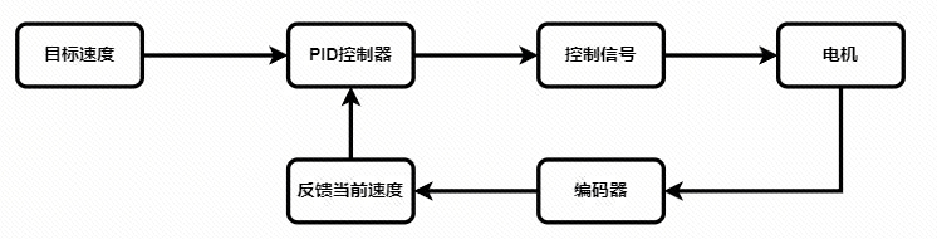
定速: 获取当前电机速度,然后根据设定的目标速度,让电机通过PID控制算法,使电机当前实时速度以最快的速度接近设定的目标速度。
定距: 根据电机旋转一圈的编码器脉冲数,确定电机旋转一圈为多少个x脉冲(x脉冲/圈),通过当前脉冲数和目标脉冲数,通过 PID 控制算法,使电机当前实时脉冲以最快的速度接近设定的目标脉冲,达到定距移动的效果。(简单来说就是让电机固定走多少步,走多了就退回,走少了就再走几步)
该项目在硬件上,除开发板外,仅使用一个编码器电机 + 电机驱动 + 屏幕 + 按键 + 电源。元器件全插件,方便焊接入门与练习。
项目在软件方面,使用裸机的方式编写驱动和逻辑,通过 轮询 + 中断 + 状态机 的架构完成项目。PID 部分不会大篇幅介绍背景、由来、模型等学术说明,将直接告诉你如何使用PID。最终可像 1 + 1 = 2 一样,直接将参数无脑带入公式,应用PID。
PID的无脑应用公式
 |  |
|---|---|
功能需求
- 屏幕显示二级菜单,通过按键选择;
- 屏幕显示PID曲线变化;
- 按键长短按控制和调参;
- 实现电机PID的实时定速调整;
- 实现电机PID的实时定距调整;
教程目录
教程文档在线阅读地址:👉立创开发板技术文档中心 | 简易PID入门项目
| 序号 | 章节名称 | 进度 | 学习目标 |
|---|---|---|---|
| 1 | 电路原理分析 | ✅ | 了解项目的硬件原理图,明白每一个器件的作用 |
| 2 | 原理图与PCB设计 | ✅ | 原理图设计包含了元器件选型、搜索以及原理图整理的内容; PCB设计部分包含边框设计、元器件分类布局、PCB走线与设计检查等内容 |
| 3 | 免费PCB打样 | ✅ | 如何在嘉立创平台进行 免费的 PCB 的打样,并拿到PCB实物 |
| 4 | 购买器件 | ✅ | 说明项目的器件购买地址和注意事项 |
| 5 | PCB焊接练习 | ✅ | 掌握常用焊接工具的使用、插件元器件的焊接与拆卸方法 |
| 6 | 开发环境搭建 | ✅ | 了解如何基于 Keil 环境下,对 TI 的 MSPM0G3507 进行开发、调试和下载 |
| 7 | 调试模块驱动 | ✅ | 学习如何搭建基于 Keil 的代码编辑调试环境,包括文件管理、串口调试、LED 调试等 |
| 8 | 彩屏驱动 | ✅ | 学习如何使用MSPM0G3507的keil环境 驱动一块1.9寸的SPI接口彩屏 |
| 9 | 按键驱动 | ✅ | 明白如何配置GPIO外设为输入模式,能够 使用常用的 开源按键库 并移植到自己的工程 |
| 0 | 电机驱动 | ✅ | 学习通过电机驱动芯片 BDR6126D 来驱动电机,并且联合按键 实现长按电机转再长按电机停功能 |
| 11 | 编码器驱动 | ✅ | 明白编码器的测速原理,通过电机上的编码器, 检测电机的速度和旋转方向 |
| 12 | UI与界面管理 | ✅ | 熟悉了解本项目的 UI绘制方法和思路,并且移植到自己的工程当中 |
| 13 | 事件与状态机 | ✅ | 了解常用的软件架构,并 将多个架构组合使用到项目中 |
| 14 | PID定速功能 | ✅ | 了解 PID的基本公式,通过实际值与目标值的误差,实现让实时速度以最快的时间接近目标速度 |
| 15 | PID定距功能 | ✅ | 了解 PID 定距功能的实现方式,通过实际值与目标值的误差,实现让实时角度以最快的时间接近目标角度 |
| 16 | 完整功能案例 | ✅ |
项目展示
 |  |  |
|---|---|---|